引言
TurtleBot3 Gazebo仿真环境是一个非常强大的工具,能够帮助开发者在虚拟环境中测试和验证机器人算法。
Gazebo是一个开源的3D机器人仿真平台,它能支持物理引擎,允许机器人在虚拟环境中模拟和测试。结合ROS,它能提供一个完整的开发环境,特别适合机器人领域的研究和开发。
本文将介绍如何在ROS Noetic环境下安装和配置TurtleBot3 Gazebo仿真环境。通过这些步骤,在Gazebo中启动TurtleBot3模型,并开始进行路径规划、导航、避障等操作。
学习目标
掌握在ROS Noetic环境下安装TurtleBot3 Gazebo仿真所需的依赖包和仿真包。
学会在Gazebo中启动TurtleBot3的三种车模型,空白场景、默认世界和房屋环境三种环模拟世界环境。
通过远程控制机器人并启用避障功能,了解TurtleBot3的基本操作方法。
安装与自己Ubuntu版本对应的ROS版本,本文ROS Noetic Ninjemys 主要支持 Ubuntu 20.04 (Focal Fossa)。安装前请详细参考 Ubuntu版本、ROS版本与Python 版本之间的关系。

学习内容
1 注意事项
注意:本文内容对应的是远程PC(桌面或笔记本电脑),用于控制TurtleBot3。 请勿将此指令应用到TurtleBot3机器人上。
首次启动模拟可能需要一些时间来完成环境设置。
2 TurtleBot3模拟环境
TurtleBot3支持在模拟中使用虚拟机器人进行编程和开发,主要有以下两种开发环境:
2.1 Fake Node + RViz
-
功能:Fake Node是一种轻量级的模拟方式,可以结合3D可视化工具RViz一起使用。这种环境可以对机器人的基本模型和运动进行测试,比如行进路线和旋转等基础行为。
-
局限性:由于Fake Node不支持传感器,因此不适合涉及传感器数据的开发任务,比如环境感知、SLAM(即时定位与地图构建)、避障等。
-
适用场景:适合需要快速验证机器人模型和基本运动功能的场景,但不支持复杂的传感器相关任务。
2.2 Gazebo
-
功能:Gazebo是一个强大的3D机器人仿真平台,支持多种传感器(如IMU、激光测距仪LDS、摄像头等),并能够逼真地模拟物理环境。这使得Gazebo能够应用于包括SLAM、导航、避障等传感器依赖的复杂任务中。
-
优点:Gazebo不仅支持TurtleBot3的物理行为模拟,还可以通过ROS接口来接收传感器数据、控制机器人动作,并实时监控机器人在仿真环境中的表现。广泛应用于ROS开发者的项目中,是研究导航、路径规划、环境感知等功能的首选平台。
-
推荐用途:由于其全面的功能支持,Gazebo非常适合复杂的机器人开发任务,比如基于传感器数据的路径规划、自动导航和避障等。
2.3 Gazebo教程
- 如果需要详细了解Gazebo的使用方法,建议访问Gazebo官方教程。
- 该教程提供了从基本安装、环境设置到高级开发功能的全面指导,适合各个水平的开发者。
3 安装Gazebo模拟包
- 本教程使用ROS Gazebo包,因此需要安装适用于ROS1 Noetic的正确Gazebo版本。
- 确保安装了TurtleBot3和TurtleBot3_msgs包,否则无法启动模拟。
javascript
# 克隆TurtleBot3仿真包
cd ~/catkin_ws/src/
git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
# 编译工作空间
cd ~/catkin_ws
catkin_make4 启动模拟环境
TurtleBot3提供了三个不同的车模型与模拟世界环境。启动新的环境前,确保完全终止其它模拟环境。
4.1 车模型环境
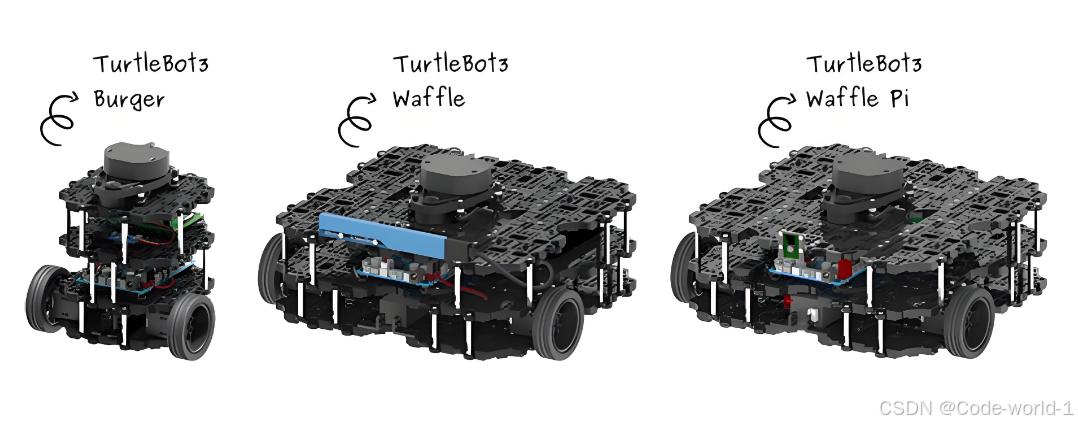
4.1.1 TurtleBot3 burger
javascript
export TURTLEBOT3_MODEL=burgerTurtleBot3 burger 模型如下图所示:
4.1.2 TurtleBot3 bwaffle
javascript
export TURTLEBOT3_MODEL=waffleTurtleBot3 waffle 模型如下图所示:
4.1.3 TurtleBot3 waffle_pi
javascript
export TURTLEBOT3_MODEL=waffle_piTurtleBot3 waffle_pi 模型如下图所示:
4.1.3 便捷设置
如果我们仿真开发时只用其中某一款,例如只用TurtleBot3 burger 。但是每次启动一个终端都需要设置TurtleBot3 的车模型,为了方便,我们直接在终端的配置文件中写入,每次打开终端会自动加载设置的某一款车模型。
javascript
# 打开.bashrc文件
sudo gedit ~/.bashrc
# 在文件末尾添加以下内容(burger车模型,其他同理)
export TURTLEBOT3_MODEL=burger4.2 模拟世界环境
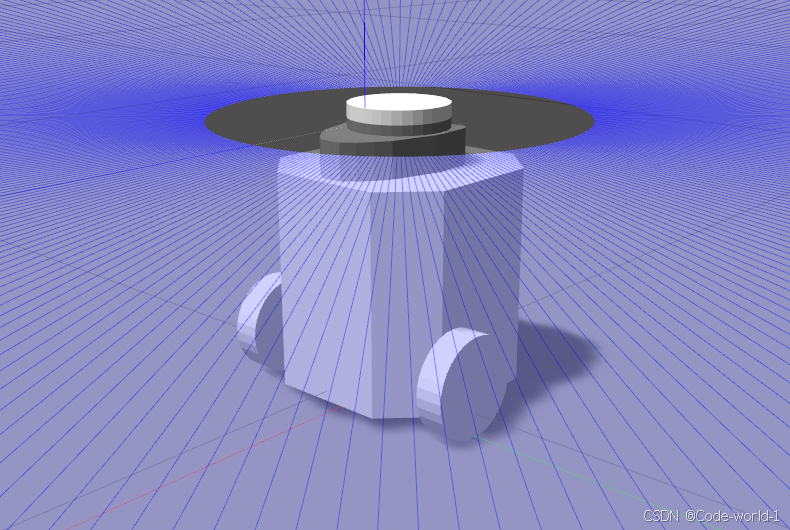
4.2.1 空白环境
javascript
# 便捷设置后可不用设置车模型
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_gazebo turtlebot3_empty_world.launchTurtleBot3 空白环境如下图所示:

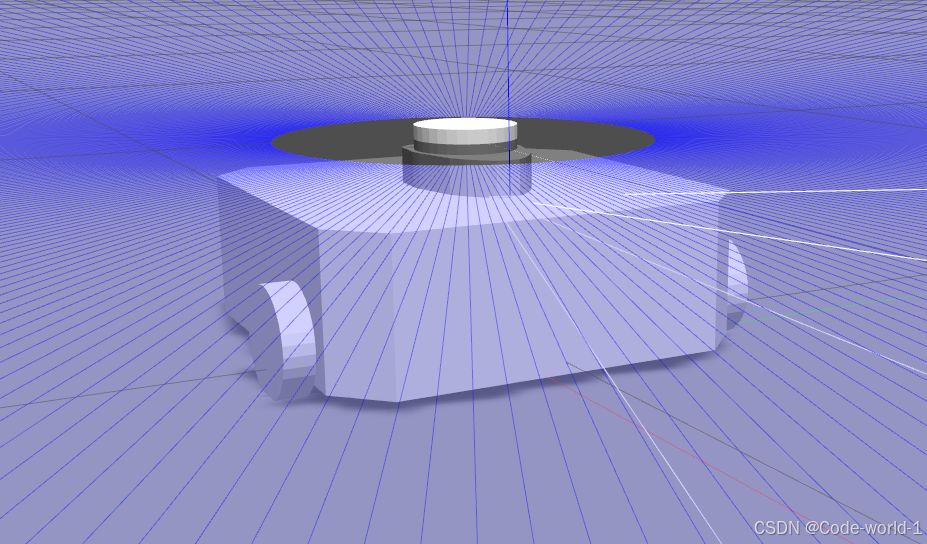
4.2.2 TurtleBot3默认世界
javascript
# 便捷设置后可不用设置车模型
export TURTLEBOT3_MODEL=burger
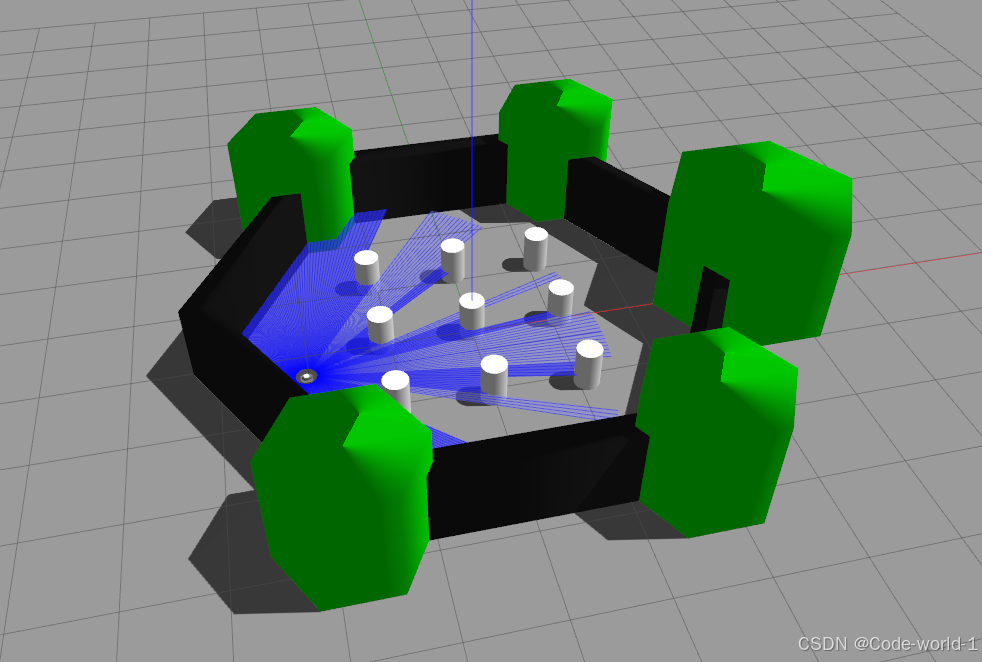
roslaunch turtlebot3_gazebo turtlebot3_world.launchTurtleBot3 默认世界环境如下图所示:
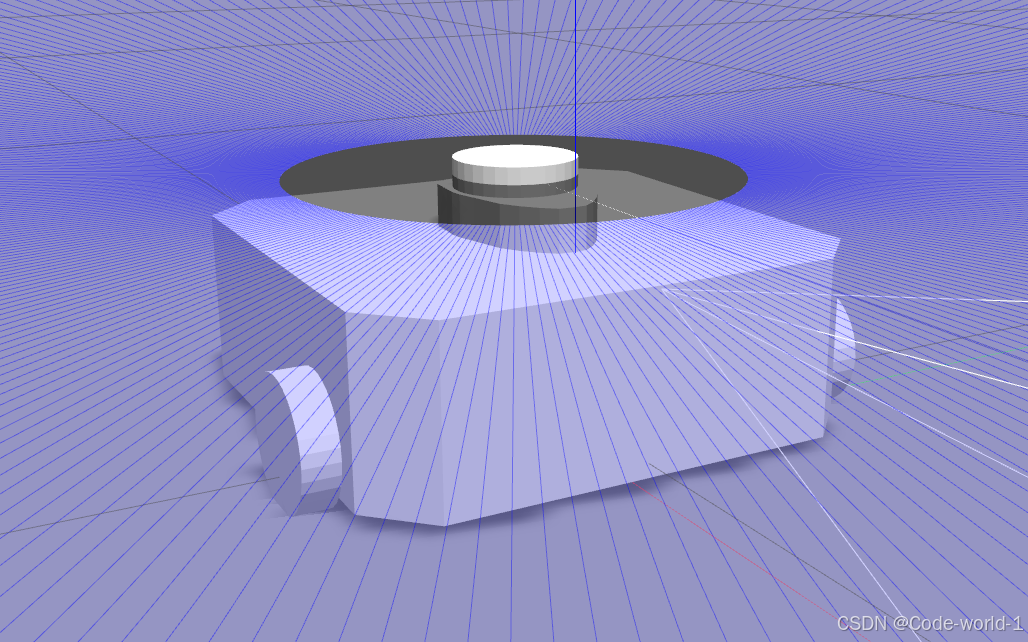
4.2.3 TurtleBot3房屋环境
javascript
# 便捷设置后可不用设置车模型
export TURTLEBOT3_MODEL=burger
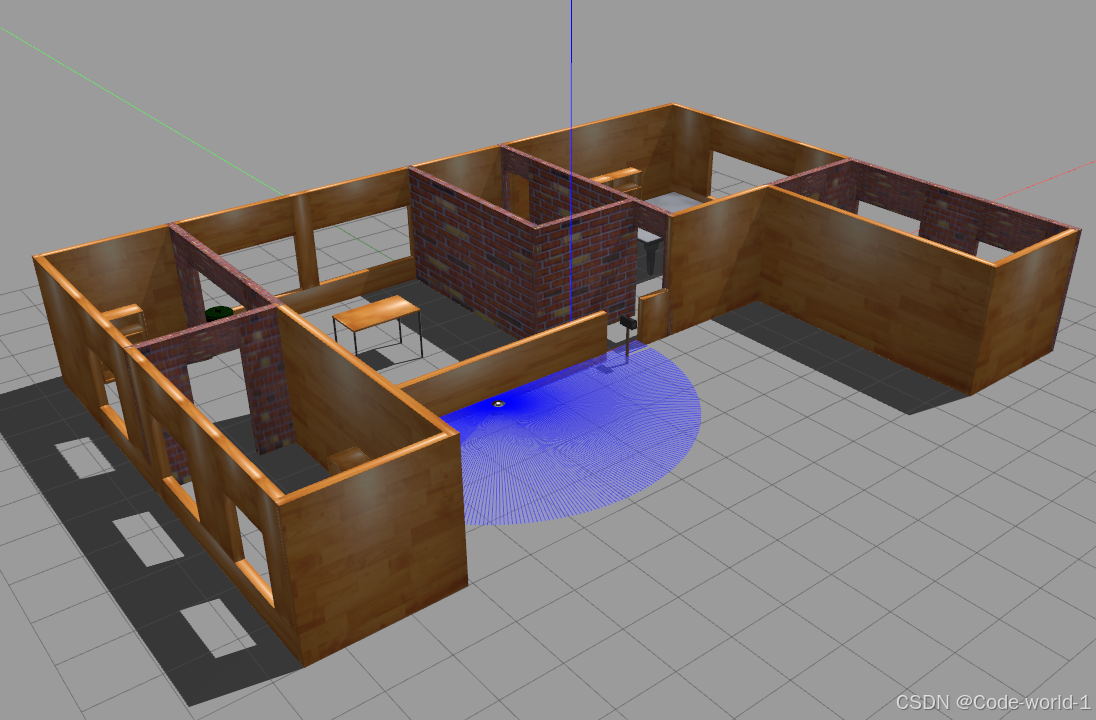
roslaunch turtlebot3_gazebo turtlebot3_house.launch提示:首次启动TurtleBot3房屋环境时,地图下载可能需要数分钟,具体时间取决于网络状况。
TurtleBot3 房屋环境如下图所示:
4.3 Gazebo启动失败原因
4.3.1 环境变量未自动加载
- 默认情况下,Gazebo 的环境变量(如路径设置等)可能没有在系统启动时加载,可以手动加载,也可类似4.1.3 便捷设置。
javascript
# 终端输入
source /usr/share/gazebo/setup.sh4.3.2 Gazebo 与 ROS 环境的兼容性问题
- Gazebo 与 ROS 有各自的环境配置,运行 ROS 的环境时可能会缺少 Gazebo 所需的一些特定配置,导致 Gazebo 启动失败。
4.3.3 多版本冲突
- 如果系统中存在多个版本的 Gazebo 或相关依赖包,可能会导致 Gazebo 找不到正确的库文件或路径。
- 手动执行 source /usr/share/gazebo/setup.sh 有助于指定正确的 Gazebo 配置。
5 键盘控制与自主避障
5.1 键盘远程控制TurtleBot3
要使用键盘远程控制TurtleBot3,在新终端窗口中启动teleoperation节点。
javascript
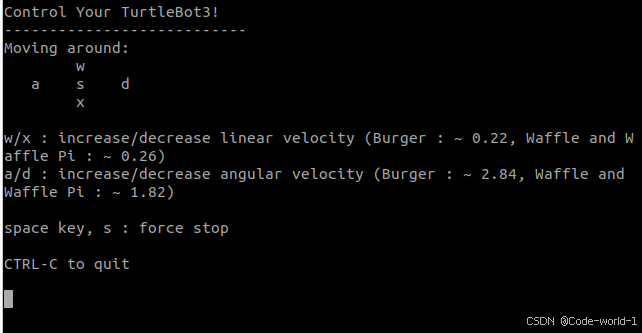
# 启动teleoperation节点
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch键盘远程控制方法如下图所示:
5.2 自主避障操作
一个简单的避障节点已准备好,可让机器人在遇到障碍时自动保持一定距离并转弯以避免碰撞。Ctrl + C结束teleop节点后,启动自主避障节点。
javascript
# 启动自主避障节点
roslaunch turtlebot3_gazebo turtlebot3_simulation.launch5.3 使用RViz可视化数据
RViz可视化仿真运行时发布的主题数据。在新终端窗口中启动RViz。
javascript
# 启动RViz
roslaunch turtlebot3_gazebo turtlebot3_gazebo_rviz.launchTurtleBot3 RViz可视化数据如下图所示:

小结
- 本文通过详细的操作步骤,在TurtleBot3仿真环境中配置和运行机器人,并通过远程控制、避障等功能实现基本的机器人行为。
- 利用RViz进行传感器数据的可视化展示,以便实时监控仿真过程。掌握这些技能为实际机器人应用开发和算法验证提供有力支持。
欢迎大家评论留言!!!
友情提示:
- 专栏:Turtlebot3 PC端ROS环境搭建与仿真
- 下一节:Ubuntu 的 ROS 2 操作系统 turtlebot3 gazebo仿真