1.首先我们要找到康耐视的下的这个链接相机软件
2.问题:显示以下这张图,不要慌张
这个就是属于你当时装visionpro工具的时候,驱动没有给他装完整

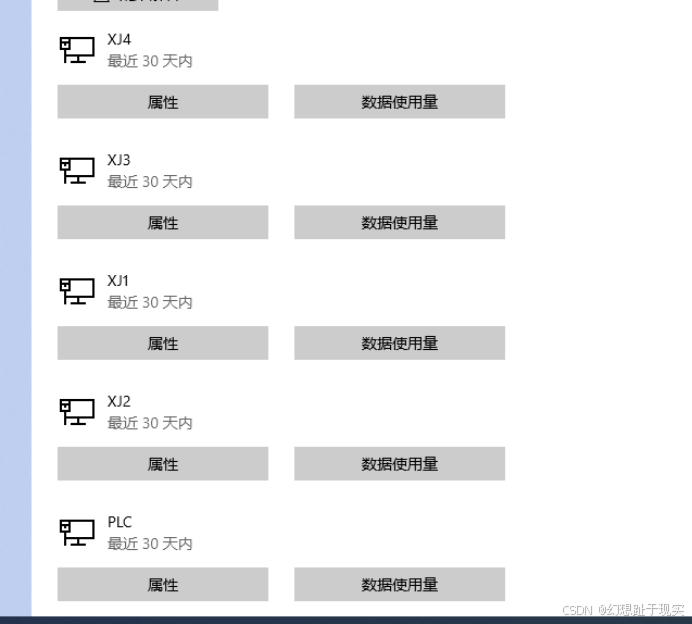
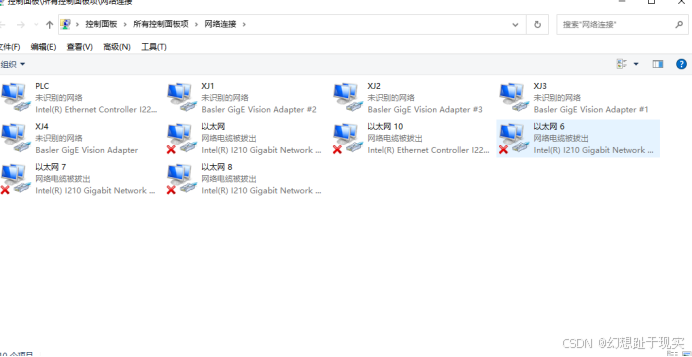
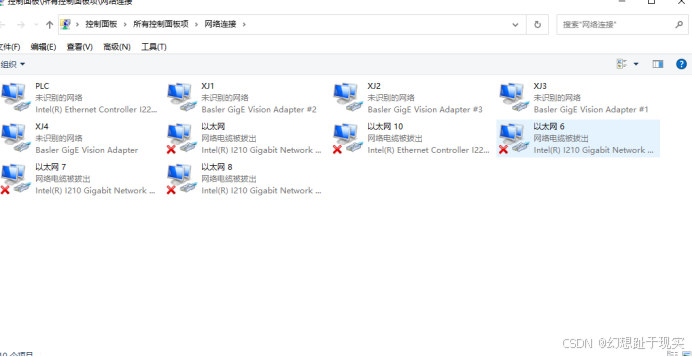
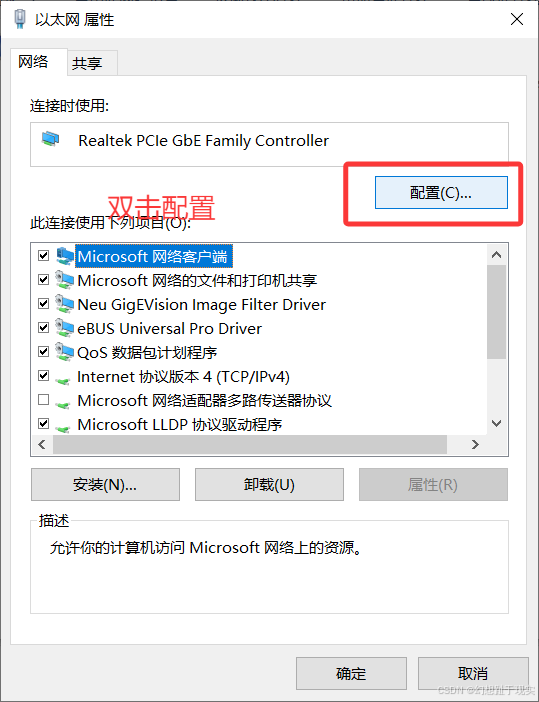
3.查看链接网口器,下面的以太网就是每个链接工控机的网口
4.检查硬件:查看相机的链接线是否正常
链接正常一般都是 黄 绿 两种颜色 这里线是 POE 供电 一个相机链接对应一个网口


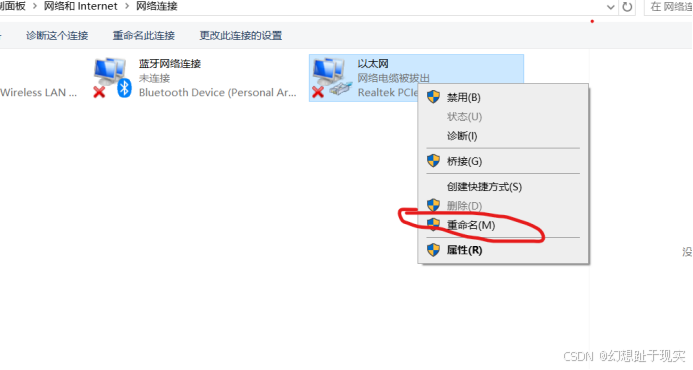
5.找到对应的相机链接网线进行重命名
修改示例:
6.问题:当我们打开康耐视链接相机驱动时候,显示如下
解决:以下这个问题是出自于你的链接
问题解决:找到下面这根界面,双击打开
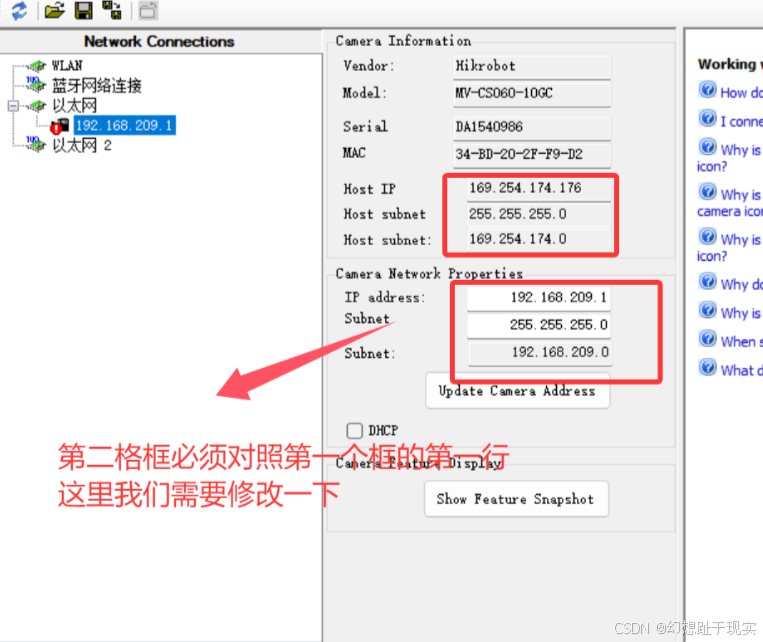
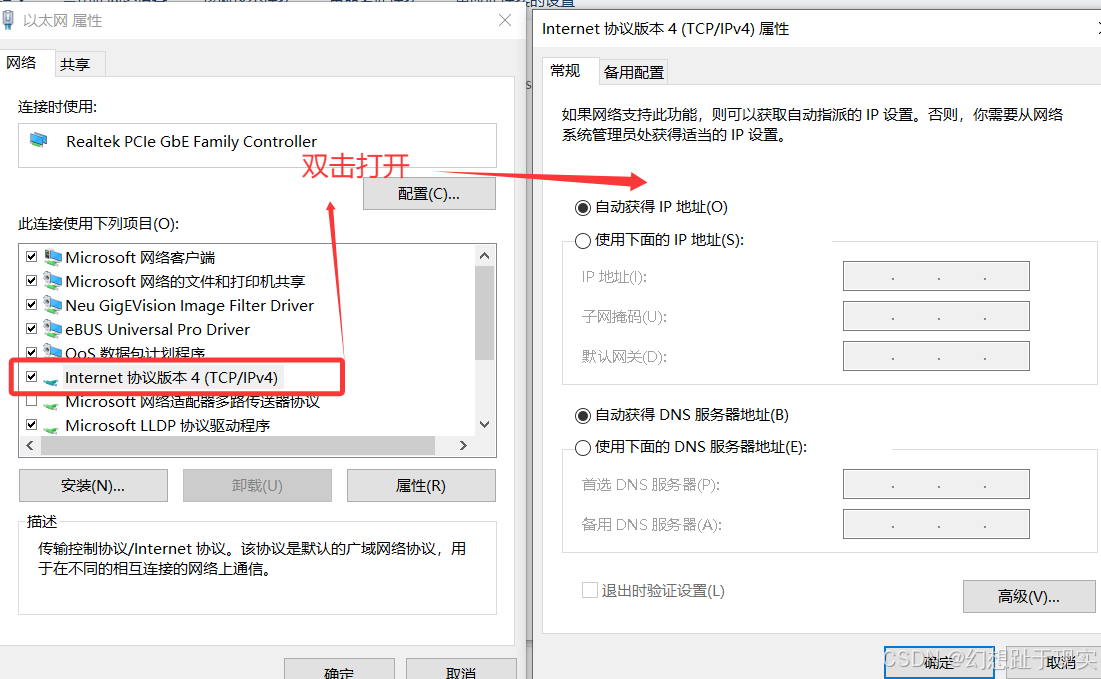 点击使用下面的IP地址
点击使用下面的IP地址
IP:192.168.(这后面随便输入) 注意第三位尽量不要和其他的ip地址一样
比如:XJ1:192.168.243.68 XJ2:192.168.244.23 (第三位ip不要一样)
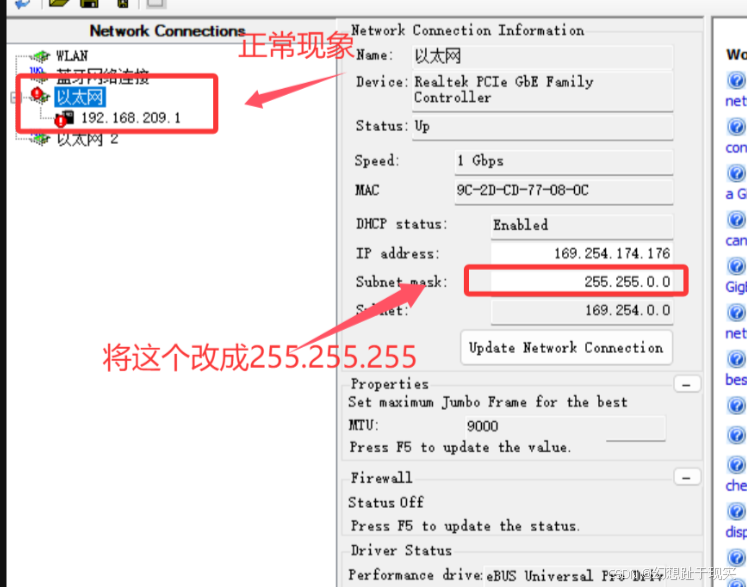
子网全部输入:255.255.255.0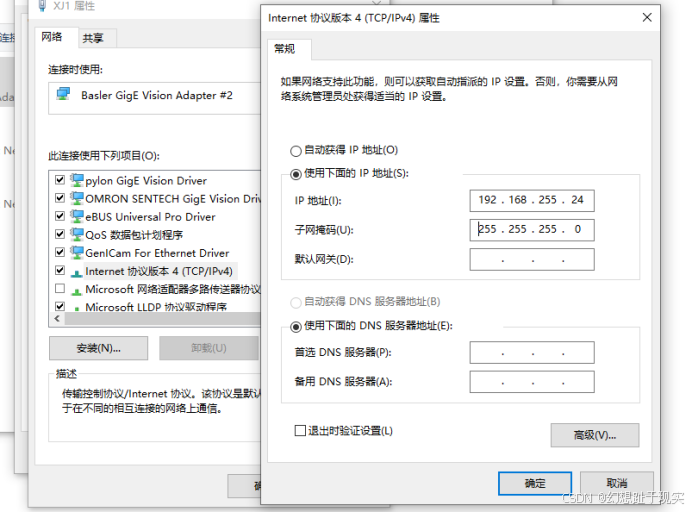
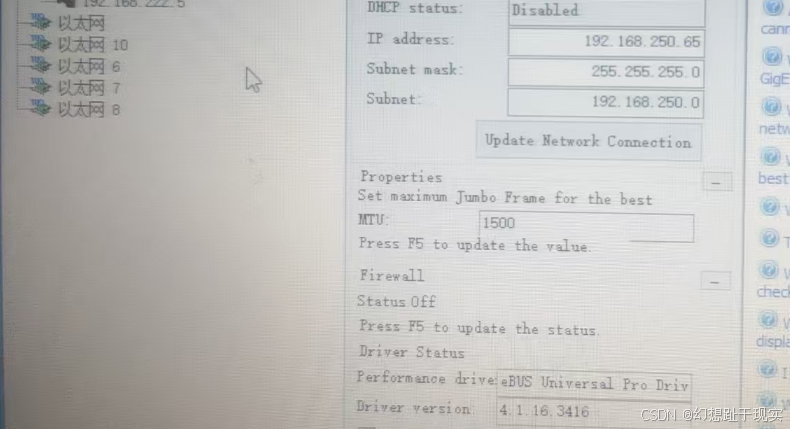
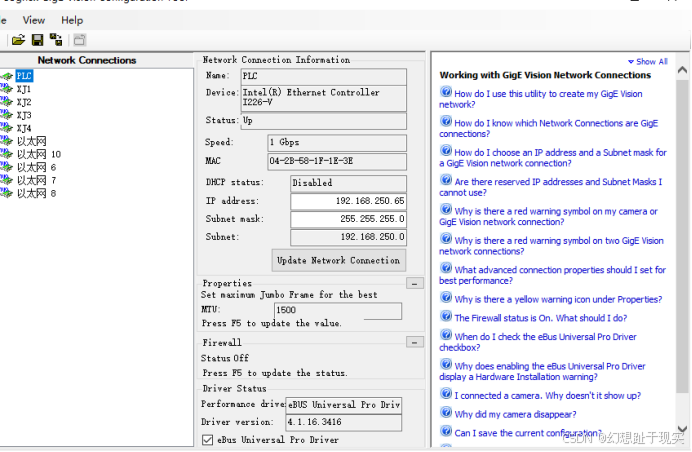
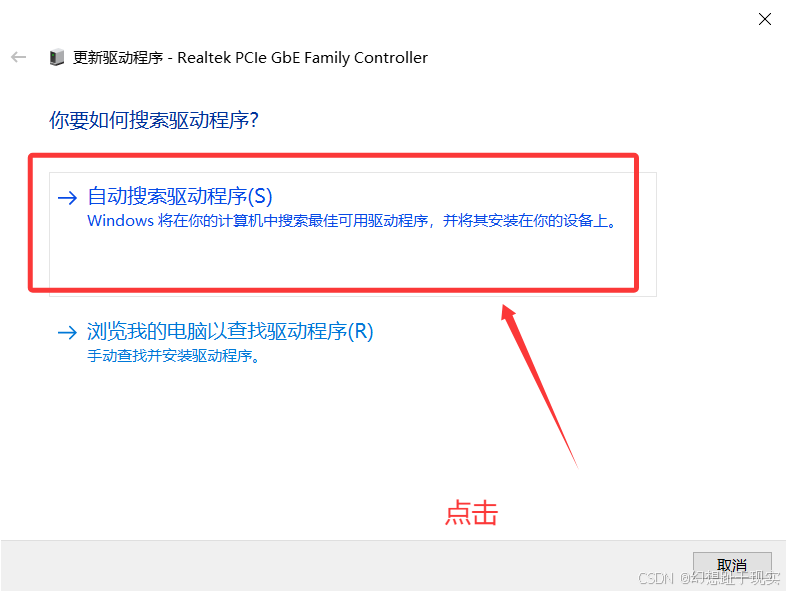
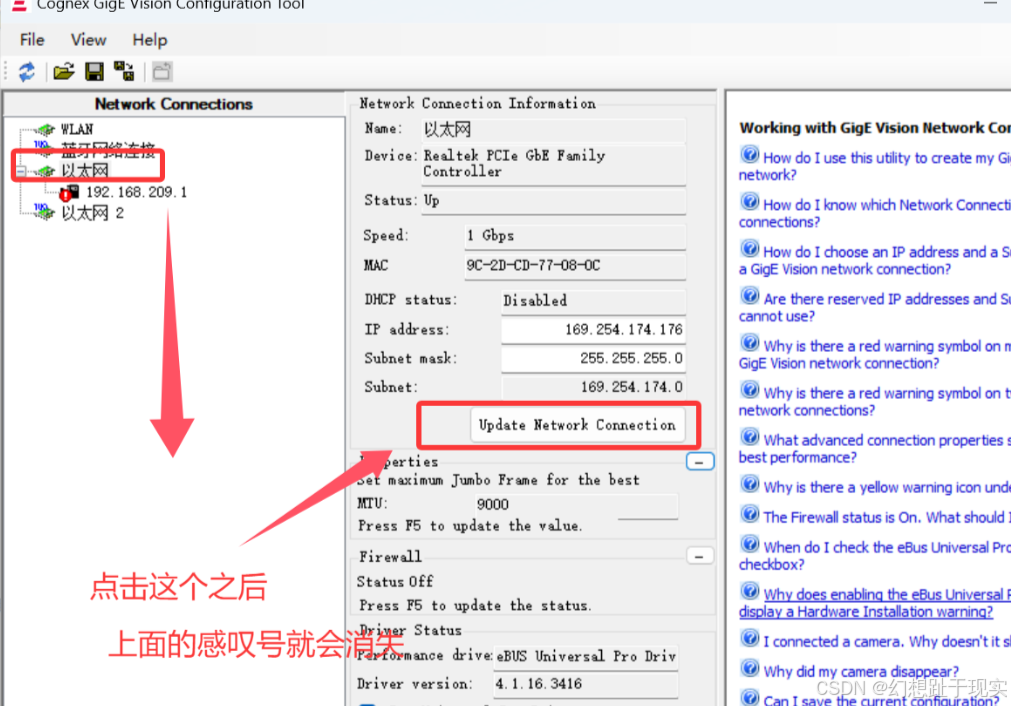
7.更新驱动 完成以下功能确保下面步骤进行



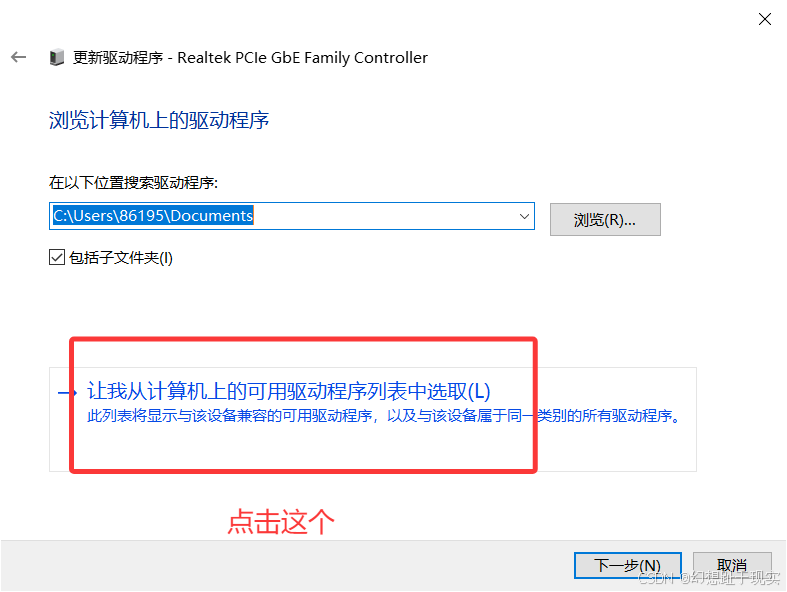

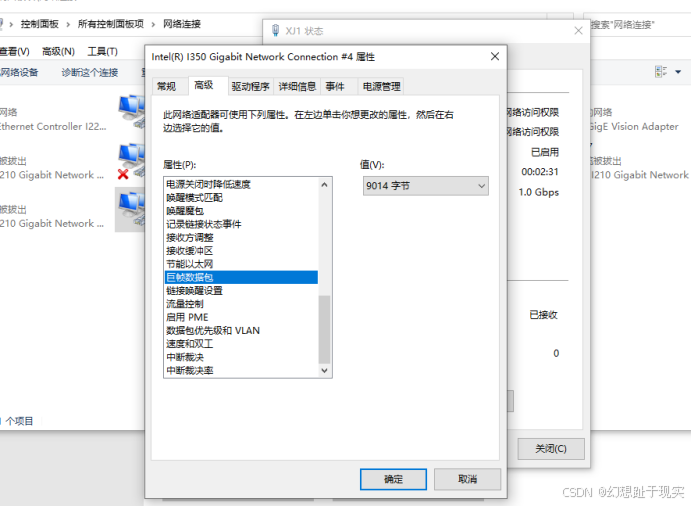
8.更改参数 高级 => 巨帧数据包 => 9014字节
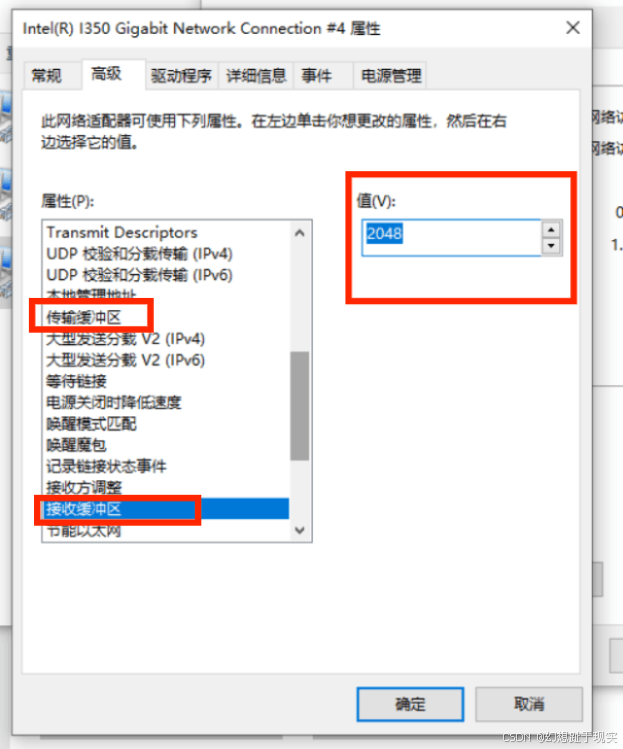
9. 修改接收缓冲区和传输缓冲区 修改成2048 防止相机链接成功会自动掉线
10.链接相机 修改完上面参数就可以显示相机了
示例:

已连接成功一个,下面的依次按照上面步骤来
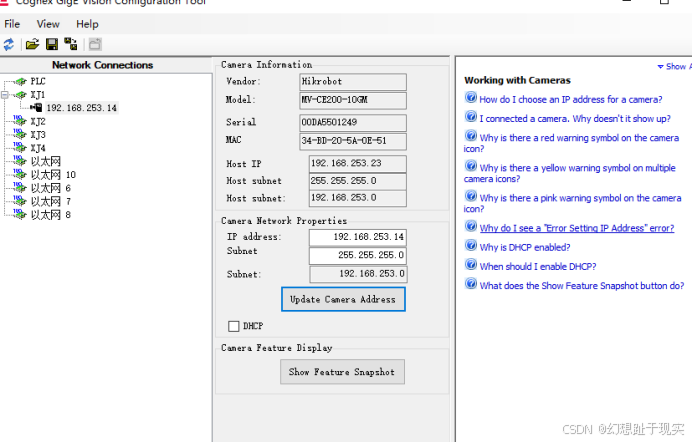
最终界面
