第四章、Isaacsim在GUI中构建机器人(1): 添加简单对象
官方课程文档:https://docs.isaacsim.omniverse.nvidia.com/latest/gui/tutorial_intro_simple_objects.html
- 添加简单对象
- 组装一个简单的机器人
- 添加摄像头和传感器
本节将构建一个简单的机器人本体,并设置它的物理属性(刚体、碰撞等)、物理材质(摩擦力)等。
1 将对象添加到场景中
我们将创建一个简单的轮式机器人,它由两个圆柱及一个立方体构成。
第一步:打开isaac sim ,进入到文件夹中在终端运行./isaac-sim.sh启动isaac sim。
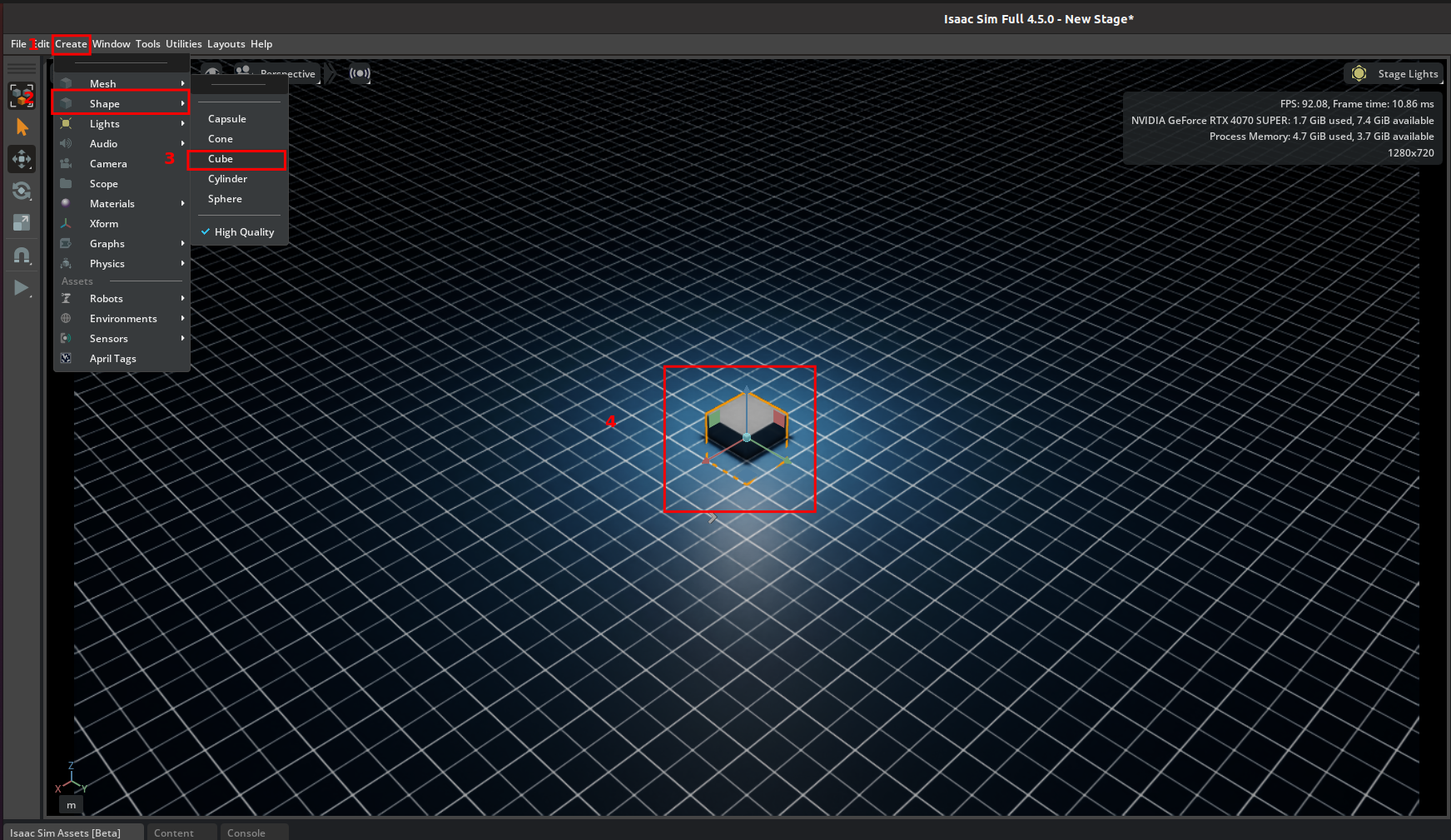
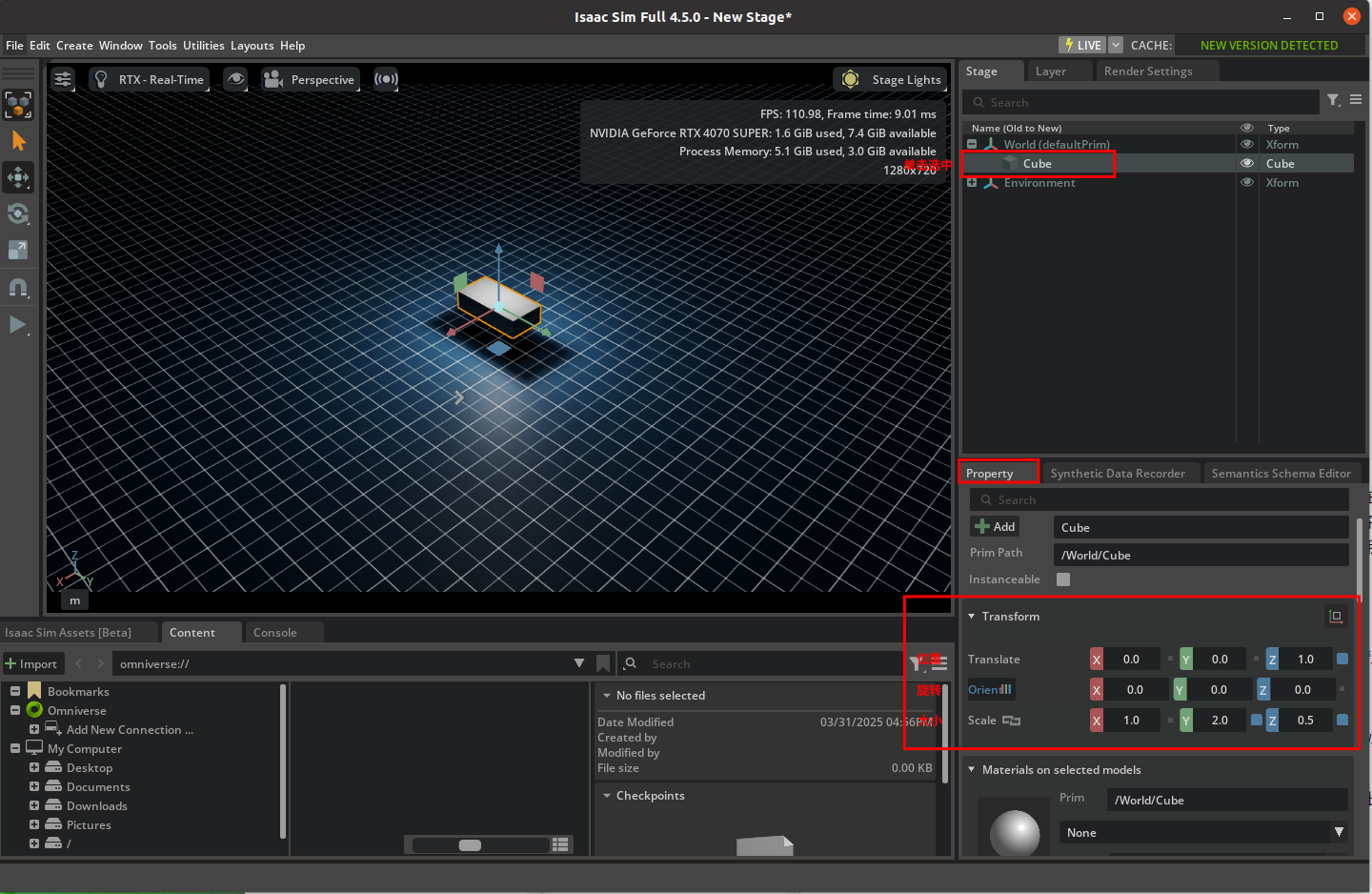
第二步:添加立方体(机器人的身体),并修改立方体的大小和位置:依次点击Create -> Shapes -> Cube添加立方体,移动下面第一张图中的红蓝绿坐标可以移动立方体;如下第二张图,选中树结构中的物体,可以在property中修改它的性质比如大小和位置。
 第三步:添加圆柱体(机器人的轮子),并修改圆柱体的大小、方向和位置:依次点击
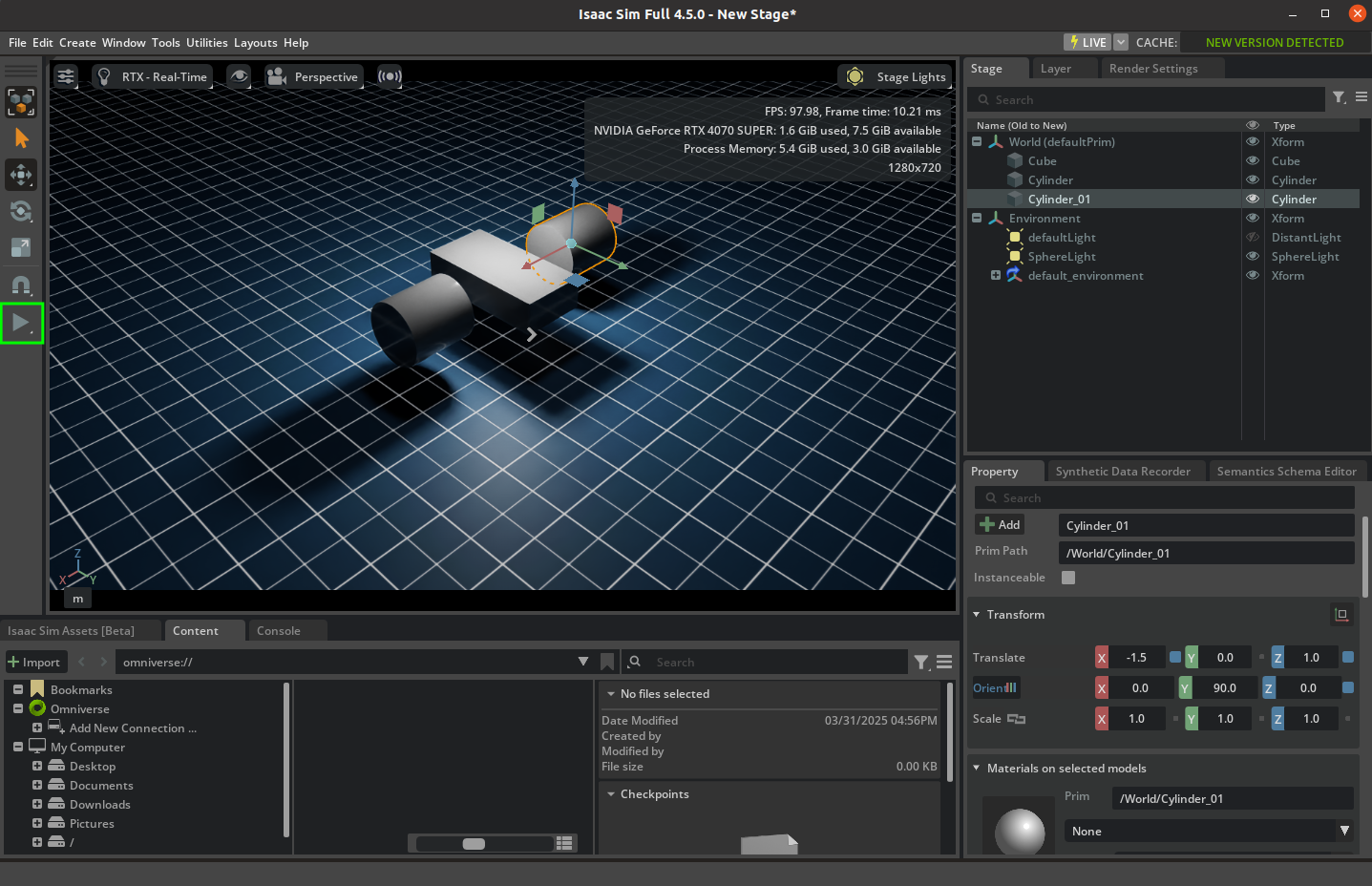
第三步:添加圆柱体(机器人的轮子),并修改圆柱体的大小、方向和位置:依次点击Create -> Shapes -> Cylinder添加圆柱体;选中树结构中的圆柱体,可以在property中修改它的性质比如大小,方向和位置。
 第四步:通过复制的方式添加另一个圆柱体并调整它的位置:右键选择 Duplicate。
第四步:通过复制的方式添加另一个圆柱体并调整它的位置:右键选择 Duplicate。

 至此我们已经创建了一个简单的机器人,但是先在该机器人没有任何物理属性,当你点击
至此我们已经创建了一个简单的机器人,但是先在该机器人没有任何物理属性,当你点击play(下图绿色框部分)该界面不会有任何变化。
2 添加物理属性
第一步:点击Create ->Physics->Physics Scene,会在右侧树节点中出现PhysicsScene。
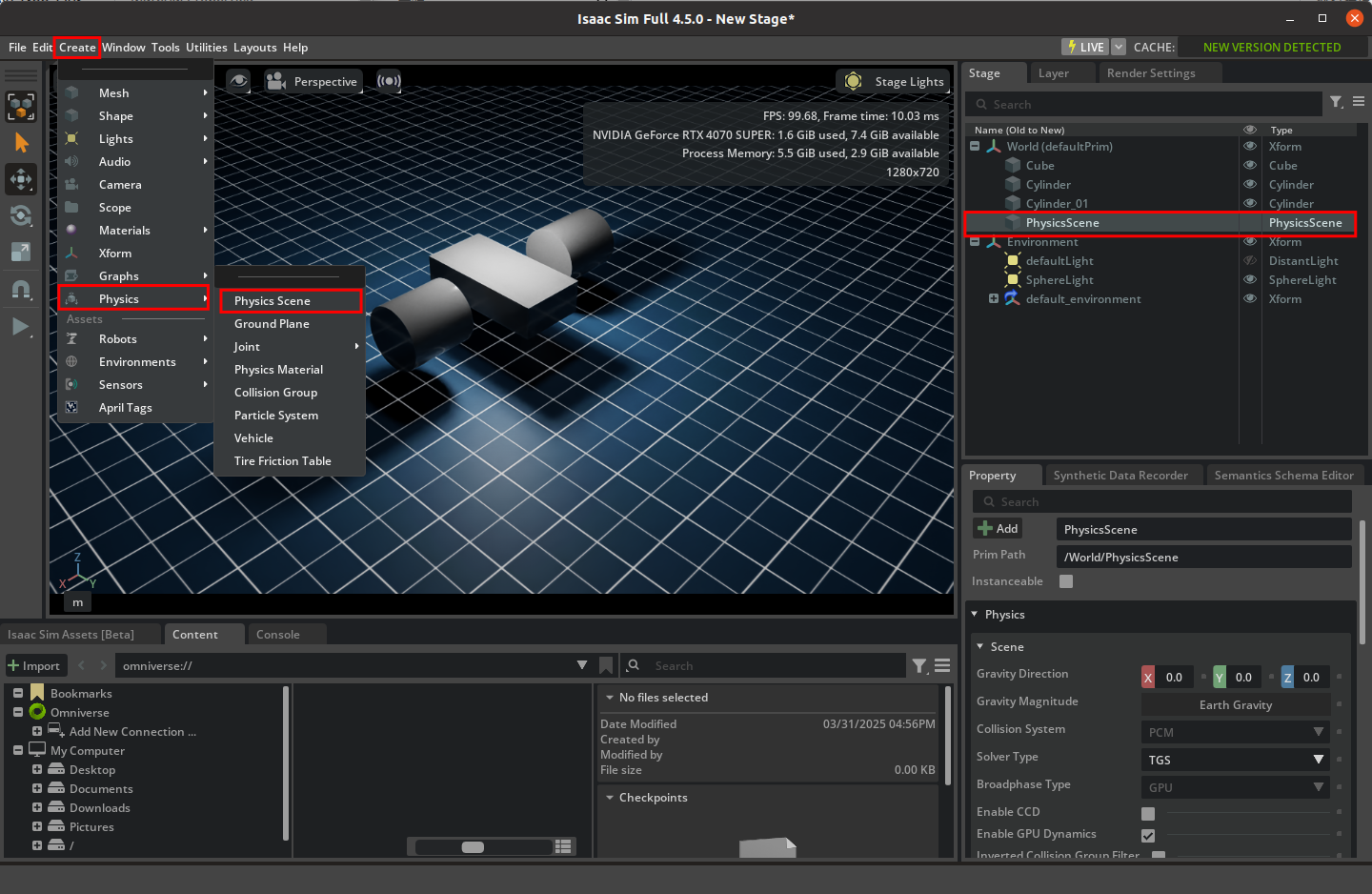
第二步:点击右侧树节点中的PhysicsScene,并调整重力参数。
 此时,点击play依然没有变化,接下来需要设置机器人的刚体和碰撞。
此时,点击play依然没有变化,接下来需要设置机器人的刚体和碰撞。
第三步:按住Ctrl + Shift多选机器人的每个部分,在property中点击+Add->Physics -> Rigid Body with Colliders Preset,点击play发现现在已经有物理属性了。

3 检查碰撞mesh
依次点击下图红色框位置就可以看到碰撞mesh,点击None又可以取消掉。

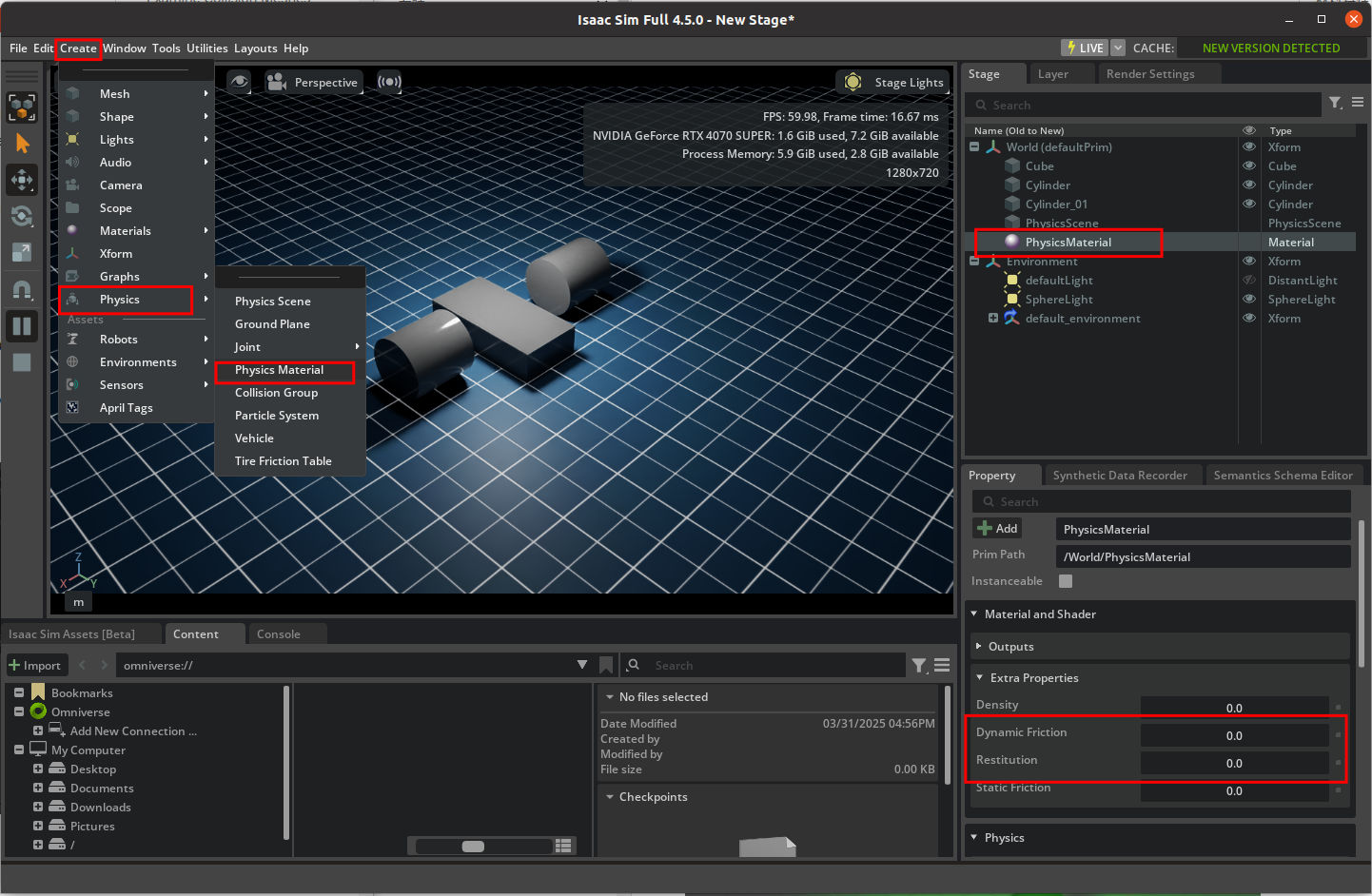
4 添加摩擦参数
依次点击 Create > Physics > Physics Material在弹出的窗口中选择Rigid Body Material,右侧树结构中会出现Physics Material,在下面的property中可以修改Dynamic Friction(摩擦力)和Restitutiion(补偿)。