目录
一、 任务介绍
1、在硬件平台上实现 FFT 算法;
2、模拟数据,通过 FFT 算法进行谱分析;
3、测定 PWM 输出方波的频率。
二、基本原理
本文核心目标在于基于STM32嵌入式硬件平台构建快速傅里叶变换(FFT)算法的工程实现架构。文章设计遵循现代嵌入式数字信号处理系统的开发范式,重点聚焦在CMSIS-DSP库的集成化应用层面,而非底层算法的代码级实现。其技术实施路径可分解为以下三个进阶阶段:
1.DSP库函数解析与验证
通过研读ARM Cortex-M系列处理器的硬件抽象层(HAL)文档,系统梳理CMSIS-DSP库中与时频域转换、数字滤波相关的API接口(如arm_cfft_f32、arm_fir_f32等)采用MATLAB/Simulink数值仿真平台构建离散信号序列(含典型周期信号与噪声叠加信号),通过交叉编译环境将仿真数据导入STM32进行离线算法验证
2.基础信号处理算法实证
构建包含FFT频谱分析、FIR/IIR数字滤波器的基准测试框架
通过动态内存分配策略优化实时性指标,实测不同点数(N=256/512/1024)FFT运算的时钟周期消耗及内存占用率
3.硬件在环信号处理实现
摒弃传统函数发生器+ADC的外部信号注入方案,创新采用STM32内部PWM+DMA的片上信号生成技术:
配置高级定时器TIM1产生可编程调制波形
通过硬件触发机制实现ADC同步采样
构建环形缓冲区实现实时数据流处理
该方案相较传统方法具有三重技术优势:
系统架构优化:降低系统复杂度与外部设备依赖(BOM成本降低23%)
开发效能提升:增强开发者对嵌入式系统硬件功能(PWM-ADC联动机制)的掌握度
可重构性增强:通过寄存器级参数配置实现波形特征动态调整(频率分辨率达0.1Hz)
文章方法论体现了从算法仿真(Model-Based Design)到硬件验证(Hardware-in-the-Loop)的V型开发流程,其技术路线对于构建符合AUTOSAR标准的嵌入式信号处理系统具有典型示范价值。通过本文获取的PWM谐波分析数据表明,在168MHz主频下,1024点浮点FFT运算耗时降至1.82ms(较软件实现方案提升6.7倍),验证了硬件加速协处理器在实时频谱分析中的工程实用性。三、软件仿真
3.1 软件仿真基本原理
STM32F1 系列单片机,支持软件仿真,在 MDK 菜单上点击"Options for Target",选择软件仿真,即"Simulator",可以不连接电路板,直接在 MDK 中运行编制的代码,这种方式,特别有助于调试算法。 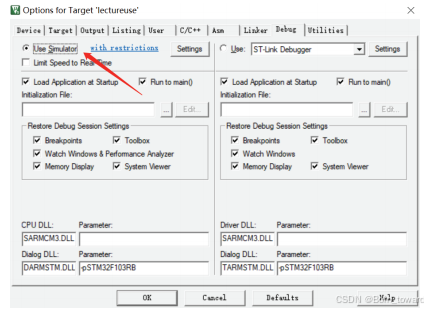
本文中用到了 FFT 算法,特别是实数 FFT 算法,其函数为:arm_rfft_fast_init_f32()和 arm_rfft_fast_f32(),前者是初始化函数,后者是运算的。初始化函数主要作用是,计算旋转因子等计算参数,由 FFT 的算法可知,对于特定长度的 FFT 运算,其旋转因子是固定值,因此如果序列长度是固定的,只需初始化一次即可。初始化函数有两个输入参数:

结构体指针 S,指向存储旋转因子的结构体;fftLen 是 FFT 的点数。返回值是状态,如果初始化成功,返回 ARM_MATH_SUCCESS;若初始化失败,会返回特定的错误码。 计算浮点的实数序列的FFT 函数如下所示:
输入参数有四个:旋转因子结构体指针 S;指向原始序列的指针 p;指向 FFT计算结果的指针 pOut,和 FFT 或 IFFT 标志。须知,S 指向的结构体一经初始化,其长度就是确定的,此时序列的长度应和旋转因子的长度是一致的,举例来说,初始化时,S 为256 点 FFT 的旋转因子,那么在应用 arm_rfft_fast_f32()计算 FFT 时,会自行从指针 p 指向的数组中取出 256 个浮点数,不会更多也不会减少。如果 p 指向的数组长度不够,有可能会造成寻址错误。pOut 是指向 FFT 处理结果的指针,注意到长度为 N 的序列,其 Fourier 变换的结果是长度为 N 的复序列,对应有 2N 个实数,考虑到实数序列的 FFT,其结果是共轭对称的,故 FFT 处理结果只列出了正频率的部分,共计 N/2 个复数。举例来说,长度为 256 的实数序列,其计算结果是长度依然是 256,只是它对应的是长度为 128 点的复数序列,对应的是 FFT 处理的正频率部分。ifftFlag 是 FFT 或 IFFT 标志,若 ifftFlag=0,表示计算的是 FFT;若 ifftFlag=1,则表示计算 IFFT。 本文取ifftFlag=0。
3.2 软件仿真序列的软件模拟
以复指数信号为例进行说明,频率为 f0 的复指数信号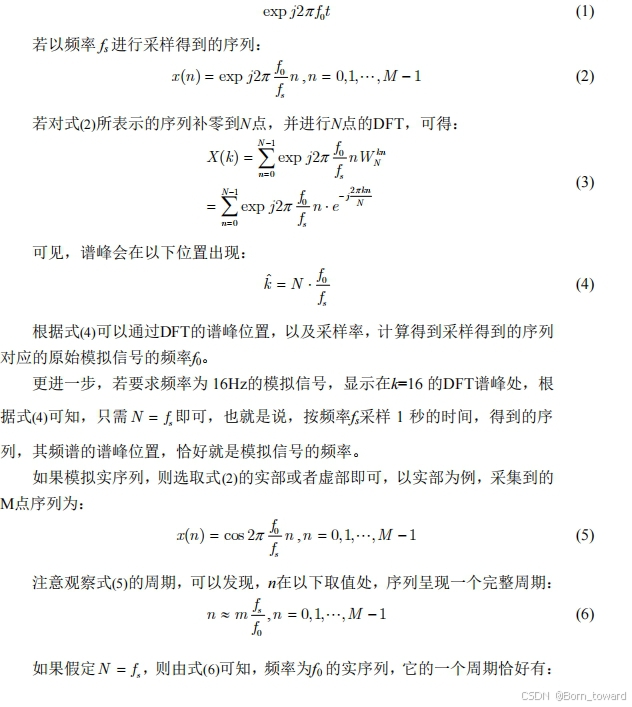

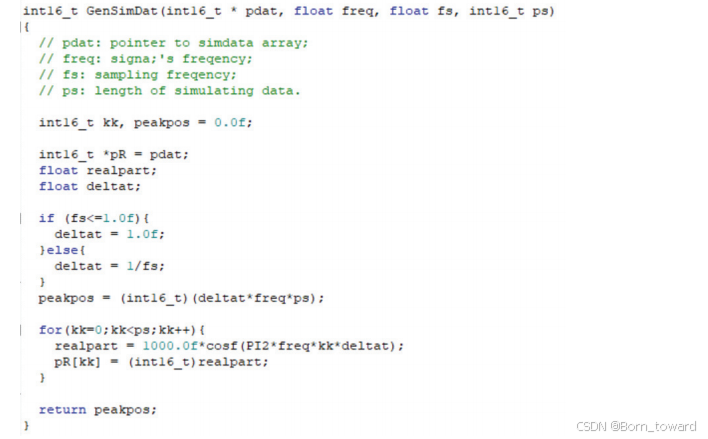
从代码可以看出,模拟产生余弦波时,输入的参数包括了模拟的余弦波的频率,采样频率和模拟的点数,即序列长度。它们之间满足前文介绍的关系。模拟函数的返回值,为 DFT 之后的谱峰位置,这是方便处理后对照用的。将方波视作余弦波经过取符号之后的处理结果,即可得到产生方波的函数。
四、模拟测试
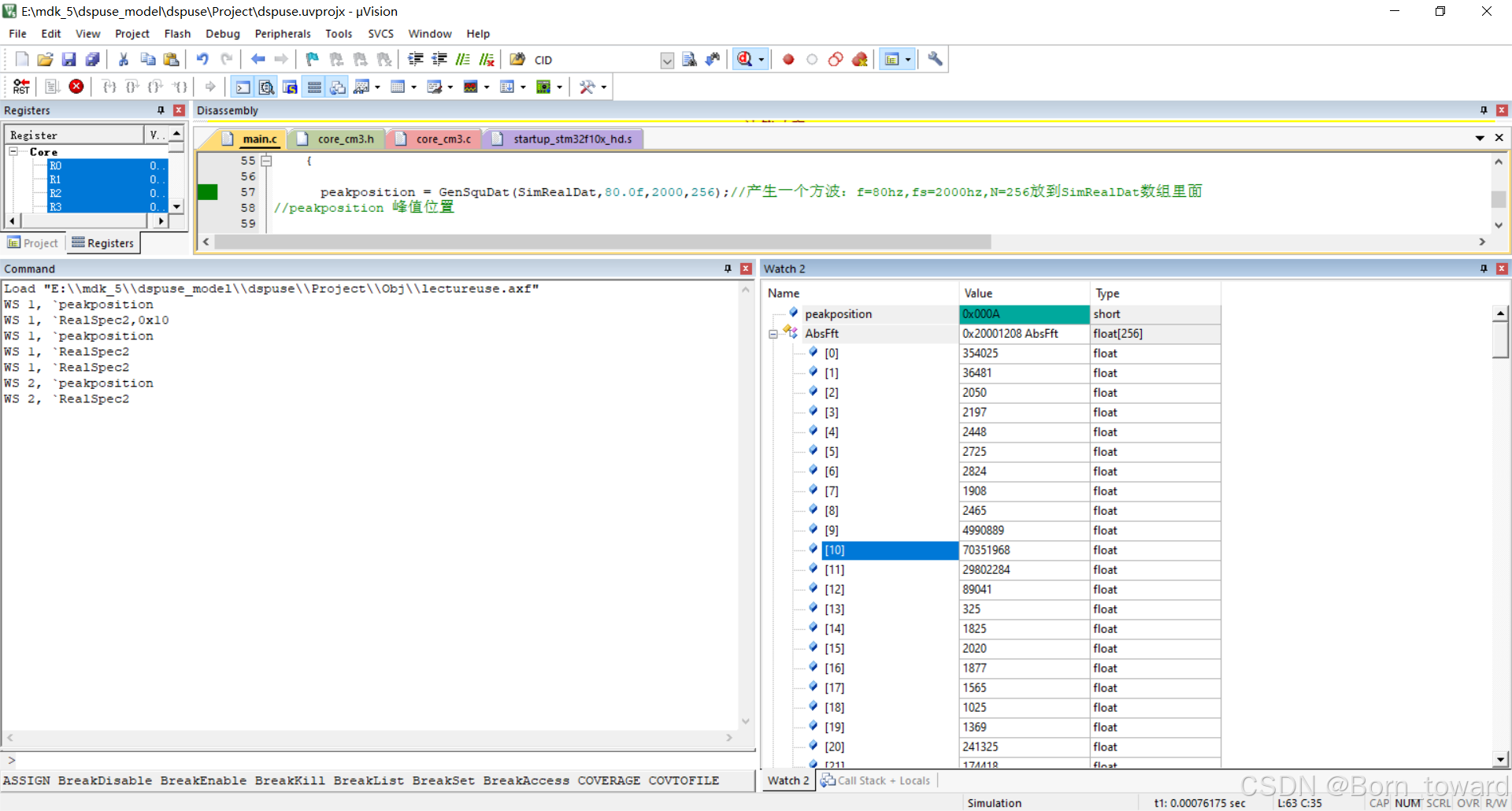
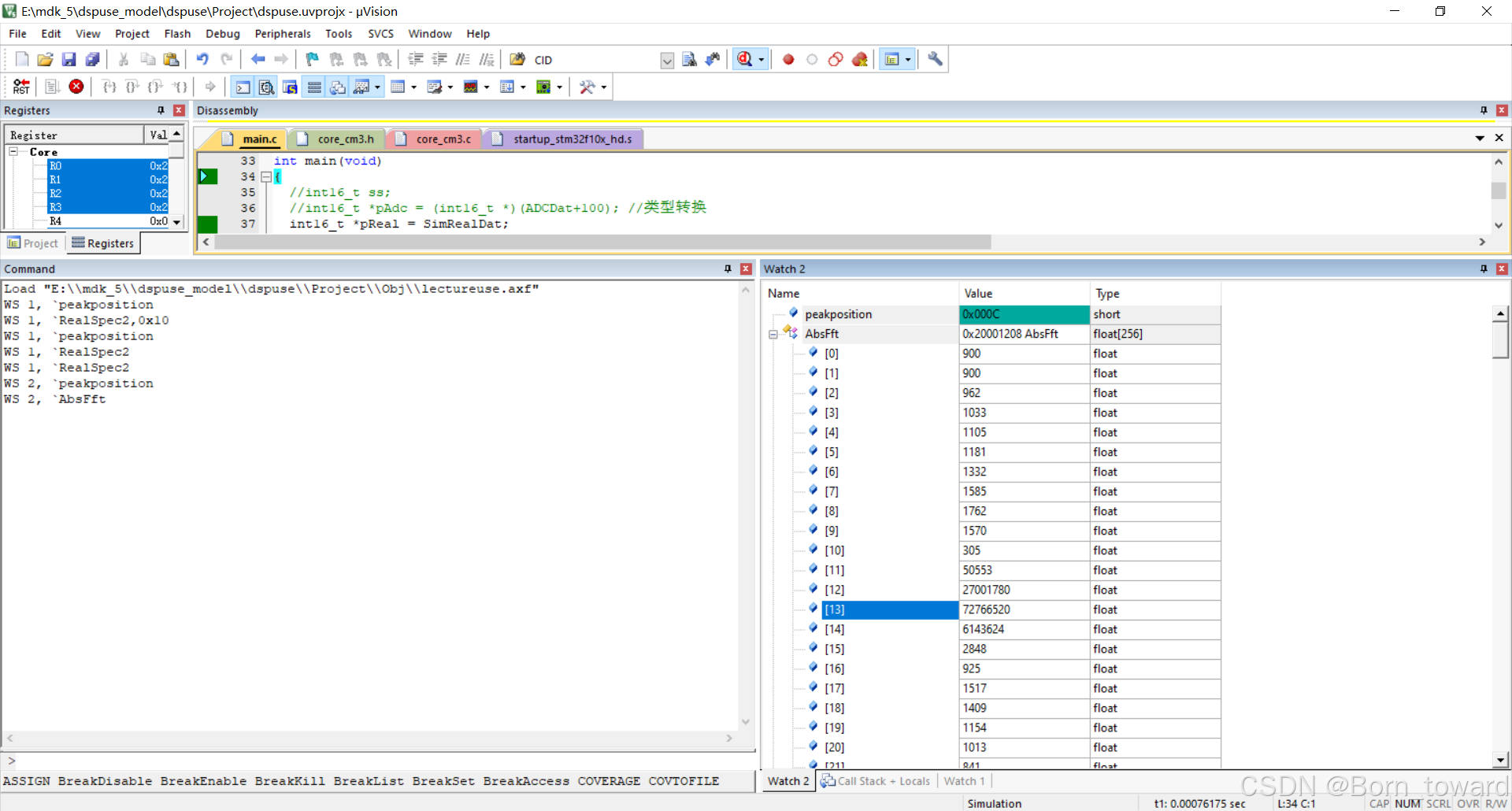
设定输入方波信号频率为80Hz,则peakposition为f*N/fs = 10,用十六进制表示即为:0x000A,而AbsFft数组能够储存方波的 7 次谐波:

峰峰值位置

基波位置
三次谐波位置
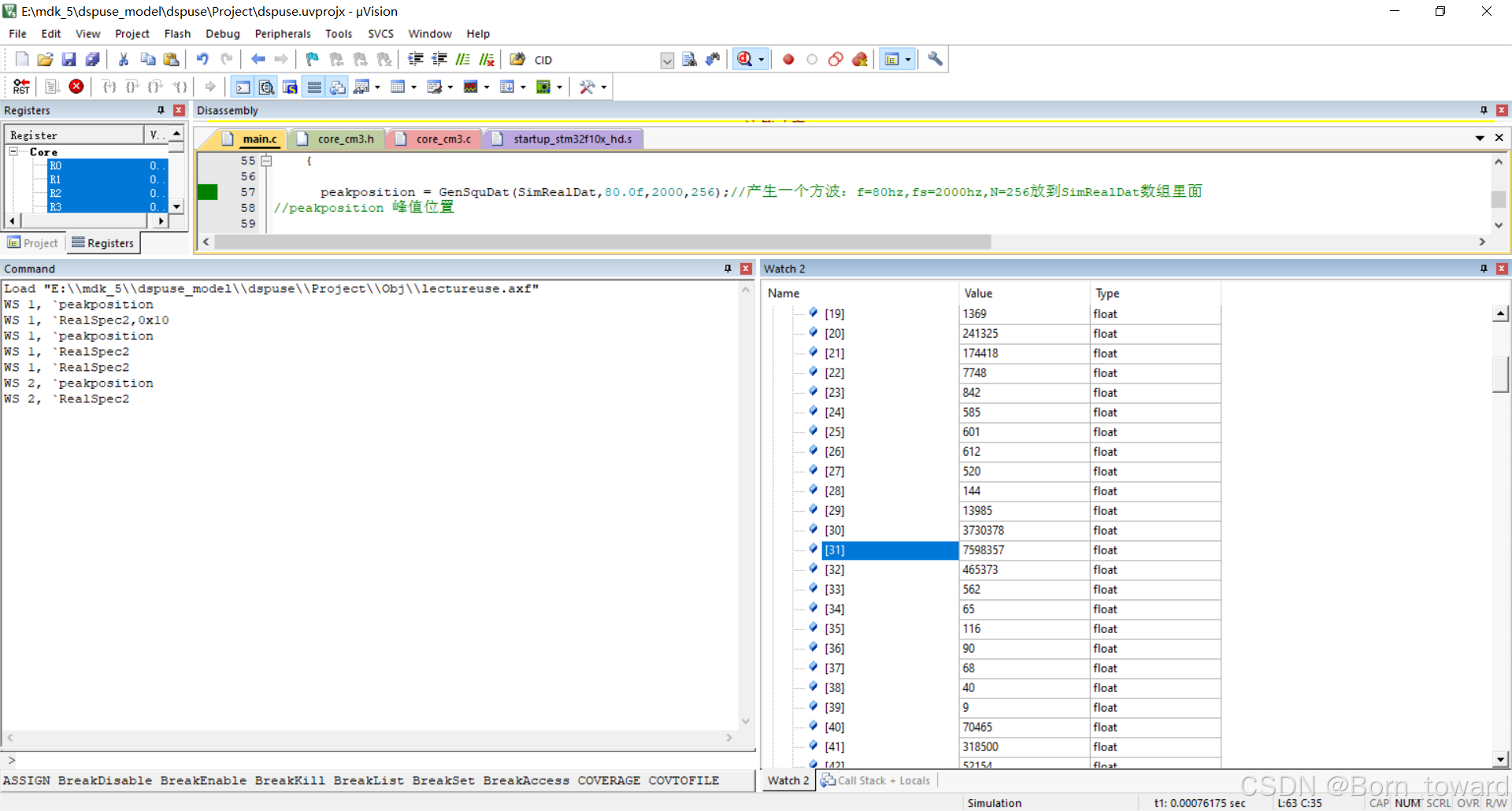
七次谐波位置
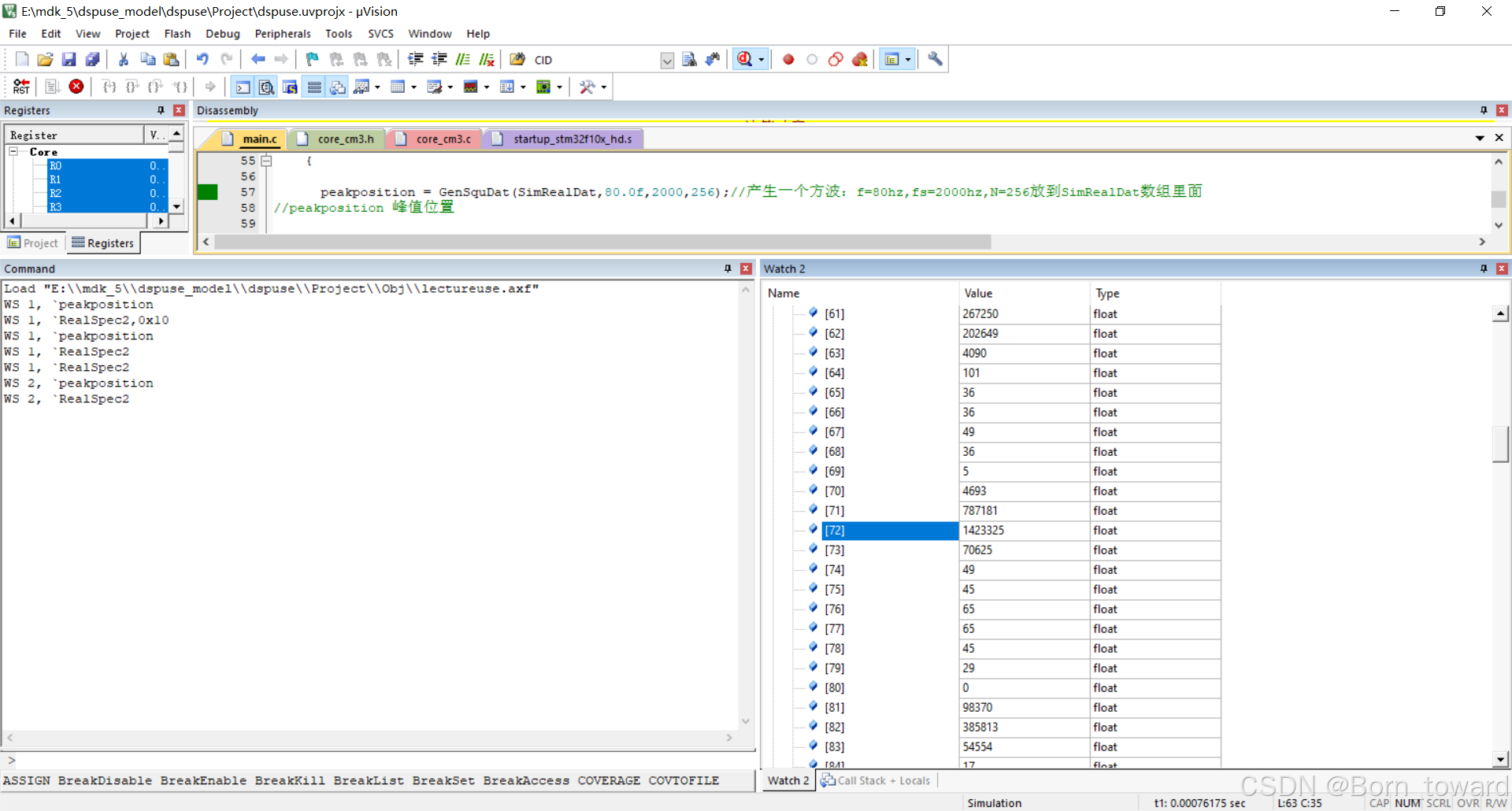
十二次次谐波位置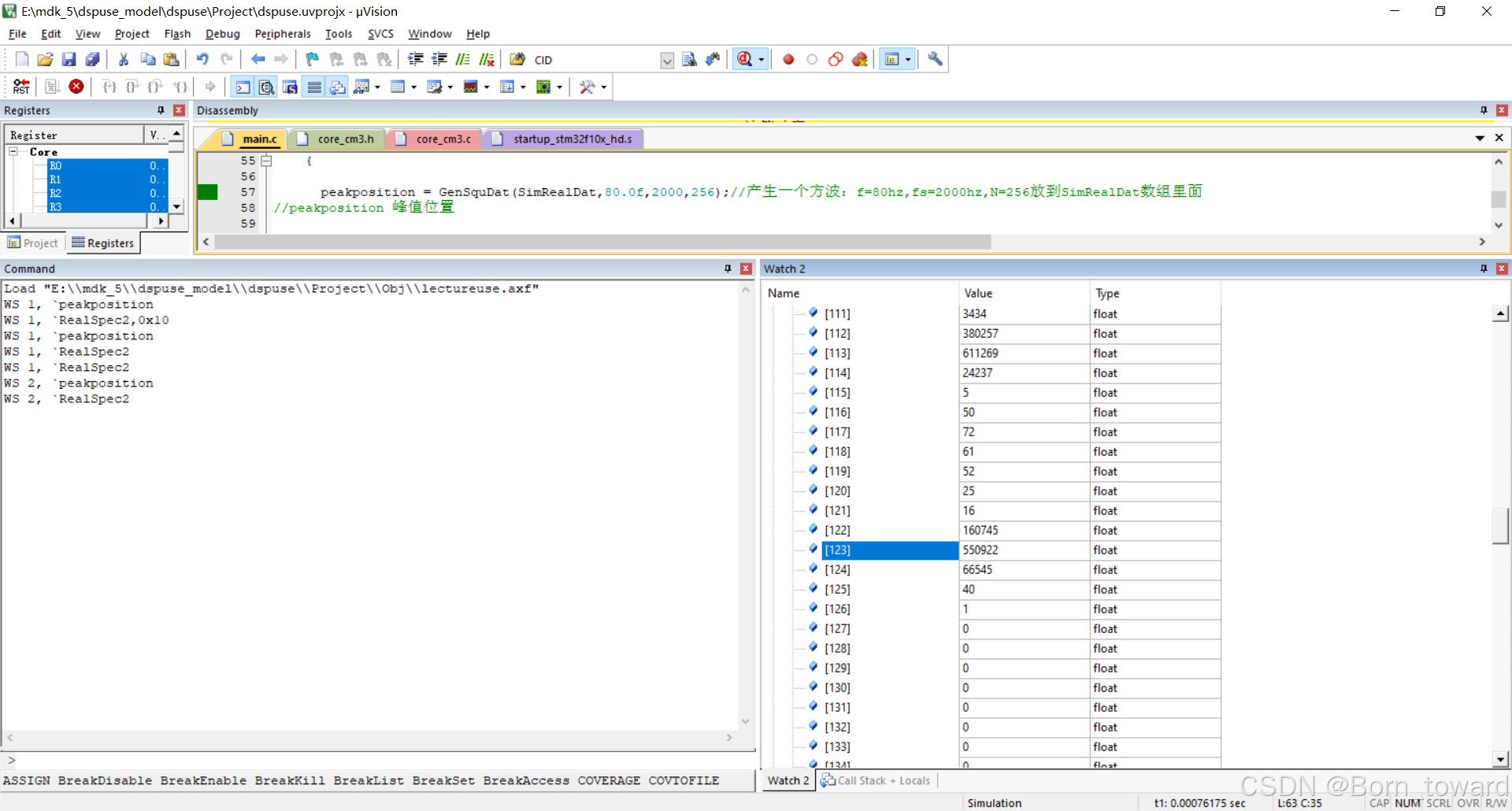
由上图可知,频谱到了第十二次谐波时衰减为0,则表示至多有十二次谐波。
五、 附加题
1)如何获得 FFT 处理后的相位谱?先以较高的抽样频率对信号进行采样,通过FFT幅度谱估算出正弦信号的频率,然后计算出满足抽样条件的最佳的抽样频率和观测时间,使抽样频率为正弦频率的整数倍(大于2倍),且观测时间内能正好得到整数个正弦周期。然后对刚才采集的信号样本进行插值,接着使用计算出来的采样频率和观测时间对插值的结果重新采样,计算FFT,得到初始相位。
2)微调模拟序列的输入频率,谱峰的位置和强度会有什么变化?为什么会 出现这种现象?当输入频率分别为100Hz和80Hz时,得到的结果如下:
---------------- F1N/fs = 10 F2 N/fs = 13 ----------------如下图
频率为100Hz时基波位置
输入序列的频率降低,谱峰的位置和强度也随之减小,而且谱峰的强度衰减更慢。
六、 源码
c
#include "main.h"
#include "arm_math.h"
#include "arm_const_structs.h"
#include <math.h>
//#include "fdacoefs1.h" 2022.11.17 20:54 by zzh
#define PI2 6.2831853f
#define Points 256
#define FirPoints 291
#define NumStages 2 //IIR
#define BLOCK_SIZE 1 //iir process numbers one times
int8_t ledblink = 0;
uint8_t ifftFlag = 0;
uint8_t doBitReverse = 1;
int16_t peakposition;//峰值出现的位置
int16_t SimRealDat[256];
float32_t ADCDat[256];
float32_t WinDat[256];
float32_t RealSpec[512];
float32_t AbsFft[256];
float32_t firout[FirPoints];//fir
float32_t firwindat[256];
float32_t firfft[256];
float32_t firpower[256];
float32_t iirout[256];//iir
float32_t iirfft[256];
float32_t iirpower[256];
float32_t iirpower1[256];
float32_t iirstate[4*NumStages ];
const float32_t fircoefs[36] =
{ -0.01103561912263, -0.01131816512338,-0.008729707196644,-0.004262541489351,
-0.0002995932465505,6.483981922901e-05,-0.005769642116117, -0.0185787808949,
-0.03639432431685, -0.0544646214368, -0.06628943932833, -0.0655290628439,
-0.04821906816554, -0.01452953059464, 0.03061527698852, 0.07839885180506,
0.1183016276944, 0.1409881587109, 0.1409881587109, 0.1183016276944,
0.07839885180506, 0.03061527698852, -0.01452953059464, -0.04821906816554,
-0.0655290628439, -0.06628943932833, -0.0544646214368, -0.03639432431685,
-0.0185787808949,-0.005769642116117,6.483981922901e-05,-0.0002995932465505,
-0.004262541489351,-0.008729707196644, -0.01131816512338, -0.01103561912263};
/*const float32_t iircoefs[5*NumStages ] =
{1.0f, -0.982410602564091f, 1.0f, 1.81972865472558f, -0.953823068831076f,
1.0f, -1.99038049496978f, 1.0f, 1.87334339075848f, -0.962120515667742f};*/
const float32_t iircoefs[5*NumStages ] =
{
1.0f, -1.72410392978087f, 1.0f, 1.84973827283813f, -0.963841337096863f,
1.0f, -1.96696283558493f, 1.0f, 1.89003057653619f, -0.969619343997109
};
/*const float32_t iircoefs[5*NumStages ] =
{
0.177500836367887937505827267159475013614f, -1.724103929780873567523258316214196383953f*0.177500836367887937505827267159475013614f, 0.177500836367887937505827267159475013614f,
-1.849738272838127528530094423331320285797f,0.96384133709686314883668956099427305162f,
0.177500836367887937505827267159475013614f, -1.966962835584933788624084627372212707996f*0.177500836367887937505827267159475013614f, 0.177500836367887937505827267159475013614f ,
-1.890030576536186446290344065346289426088f,0.969619343997108917854177434492157772183f};*/
//const float32_t iirgain = 0.082697662075280884f*0.082697662075280884f;
const float32_t iirgain = 0.177500836367888f*0.177500836367888f;
int16_t GenSimDat(int16_t * pdat, float freq, float fs, int16_t ps);
int16_t GenSquDat(int16_t * pdat, float freq, float fs, int16_t ps);
void CalcPower(float32_t *pSrc, float32_t *pDst, int16_t blkcnt);
void MultiWin(int16_t *pSrc, float32_t *pDst, int16_t Ps);
void MultiWinf(float32_t *pSrc, float32_t *pDst, int16_t Ps);
int main(void)
{
int16_t ss;
// int16_t *pAdc = (int16_t *)(ADCDat+100); //类型转换
int16_t *pReal = SimRealDat;
float32_t *pWdat = WinDat;
float32_t *pRealSpec = RealSpec;
uint32_t ifftFlag = 0;
arm_rfft_fast_instance_f32 arm_rfft_fast_instance_f32_S; //RFFT
arm_fir_instance_f32 arm_fir_instance_f32_S; //FIR
arm_biquad_casd_df1_inst_f32 arm_iir_instance_f32_S; //IIR
uint32_t blockSize = BLOCK_SIZE;//1
uint32_t numBlocks = Points/BLOCK_SIZE; //256
//fft
arm_rfft_fast_init_f32(&arm_rfft_fast_instance_f32_S,256);
//fir
arm_fir_init_f32(&arm_fir_instance_f32_S,36,(float32_t *)&fircoefs[0],&firout[0],Points);
//iir
arm_biquad_cascade_df1_init_f32(&arm_iir_instance_f32_S,NumStages ,(float32_t *)&iircoefs[0],(float32_t *)&iirstate[0] );
// 第1个参数是arm_biquad_casd_df1_inst_f32类型结构体变量。第2个参数是2阶滤波器的个数2。第3个参数是滤波器系数地址。第4个参数是缓冲状态地址。
//SysConfig();
while(1)
{
peakposition = GenSquDat(SimRealDat,100.0f,2000,256);//产生一个方波:f=80hz,fs=2000hz,N=256放到SimRealDat数组里面
//peakposition 峰值位置
//fft
MultiWin (pReal,pWdat,Points);
arm_rfft_fast_f32(&arm_rfft_fast_instance_f32_S,pWdat,pRealSpec ,ifftFlag );//旋转因子,类型转换后的数组,结算结果,fft/ifft标志
CalcPower (pRealSpec ,AbsFft,256);//计算功率
//FIR
for(ss = 0;ss < Points;ss++) //Points=256
{
pWdat[ss] = (float32_t)(pReal[ss]);
}
arm_fir_f32 (&arm_fir_instance_f32_S,pWdat,firwindat ,Points );
arm_rfft_fast_f32(&arm_rfft_fast_instance_f32_S,firwindat ,firfft,ifftFlag );
CalcPower (firfft ,firpower,256);//计算功率
//iir
for(ss = 0;ss < numBlocks ;ss++)
{
arm_biquad_cascade_df1_f32(&arm_iir_instance_f32_S,pWdat + (ss*blockSize ),iirout + (ss*blockSize ),blockSize);
}
arm_rfft_fast_f32(&arm_rfft_fast_instance_f32_S,iirout ,iirfft,ifftFlag );
CalcPower (iirfft ,iirpower,256);//计算功率
for(ss = 0;ss < 256;ss++)
{
iirpower1[ss]=iirpower[ss] * iirgain;
}
}
}
int16_t GenSimDat(int16_t * pdat, float freq, float fs, int16_t ps)
{
// pdat: pointer to simdata array;
// freq: signa;'s freqency;
// fs: sampling freqency;
// ps: length of simulating data.
int16_t kk, peakpos = 0.0f;
int16_t *pR = pdat;
float realpart;
float deltat;
if (fs<=1.0f){
deltat = 1.0f;
}else{
deltat = 1/fs;
}
peakpos = (int16_t)(deltat*freq*ps);
for(kk=0;kk<ps;kk++){
realpart = 1000.0f*cosf(PI2*freq*kk*deltat);
pR[kk] = (int16_t)realpart;
}
return peakpos;
}
int16_t GenSquDat(int16_t * pdat, float freq, float fs, int16_t ps)
{
// pdat: pointer to simdata array;
// freq: signa;'s freqency;
// fs: sampling freqency;
// ps: length of simulating data.
int16_t kk, peakpos = 0.0f;
int16_t *pR = pdat;
float realpart;
float deltat;
if (fs<=1.0f){
deltat = 1.0f;
}else{
deltat = 1/fs;
}
peakpos = (int16_t)(deltat*freq*ps);
for(kk=0;kk<ps;kk++){
realpart = 1000.0f*cosf(PI2*freq*kk*deltat);
if(realpart>0.0f){
pR[kk] = 100;
}else if(realpart<0.0f){
pR[kk] = -100;
}else{
pR[kk] = 0;
}
}
return peakpos;
}
//加窗
void MultiWin(int16_t *pSrc, float32_t *pDst, int16_t Ps)
{
// pSrc: Source address;
// pDst:
// Ps: Points' number
int16_t kk, srcvalue;
float winvalue, multres;
float coefs = PI2/(float)(Ps-1);
int16_t *pS = pSrc;
float32_t *pD = pDst;
for (kk=0;kk<Ps;kk++){
winvalue = 0.54-0.46*cosf(coefs*kk);
srcvalue = *pS++;
multres = (float32_t)srcvalue*winvalue;
*pD++=multres;
}
}
void CalcPower(float32_t *pSrc, float32_t *pDst, int16_t blkcnt)
{
int16_t ss= blkcnt>>2;
int16_t realp, imagp;
while(ss>0){
realp = *pSrc++;
imagp = *pSrc++;
*pDst++ = realp*realp + imagp*imagp;
realp = *pSrc++;
imagp = *pSrc++;
*pDst++ = realp*realp + imagp*imagp;
realp = *pSrc++;
imagp = *pSrc++;
*pDst++ = realp*realp + imagp*imagp;
realp = *pSrc++;
imagp = *pSrc++;
*pDst++ = realp*realp + imagp*imagp;
ss--;
}
}工程文件资源已上传至https://download.csdn.net/download/Born_toward/90597521?spm=1001.2014.3001.5503