工业机器人的安装有多种方式,KUKA机器人的安装方式通常有三种:正装(安装在地面)、侧装和倒装(倒挂)。出厂默认设置的安装方式都为正装的,或者专用的机器人设置为其他安装方式。根据现场实际安装要求,如果需要更改安装方式,通过以下操作可以对KUKA机器人的安装方式进行设置。
一、在电脑上安装与机器人系统版本相对应的Workvisual软件版本后,打开Workvisual软件,通过网线连接机器人控制柜并打开项目;
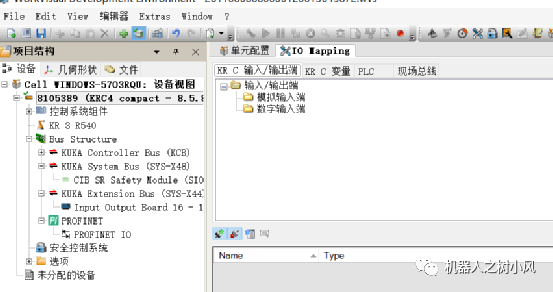
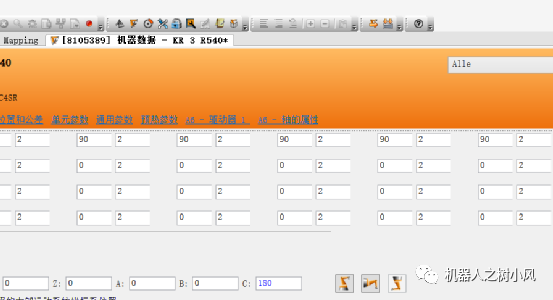
二、在【项目结构】栏,找到【几何形状】下打开机器人本体,如下图的KR3R540,出现关于机器人【机器数据】的设置页面;
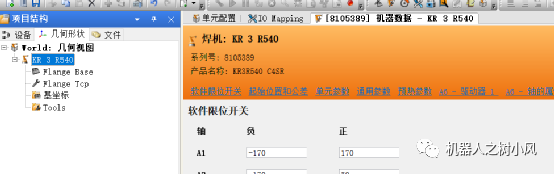
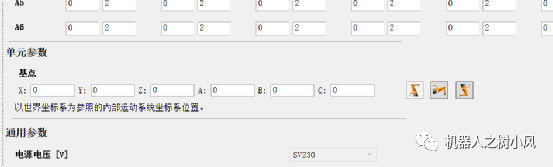
三、找到【单元参数】设置栏,基点中的参数X、Y、Z、A、B、C默认设置的都为0,代表安装方式正装;
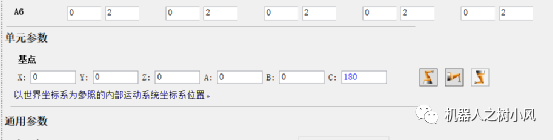
四、如果想将安装方式改为倒装,则直接点击右侧相应本体的图标即可,此时C的值变为180;侧装也可直接点击右侧第二个侧装的图标。
五、接下来进行编译下载,没报错的话就可以安装项目了,等激活完成后就可以操作机器人查看坐标系的方向了。
通过以上操作即可完成对KUKA机器人安装方式的更改。