受到鱼类、鸟类和蚂蚁等微小生物体协作操纵的启发,研究人员开发了多机器人协作运输系统(Multirobot Cooperative Transportation Systems,MRCTS)运输单个机器人无法处理的重型超大物体,可用于搜救行动、灾难响应、军事物资运输等场景。现有MRCTS主要在平坦路面上运输有效载荷,很少或根本无法在不平坦的道路上运输物体。
清华大学刘辛军教授研究团队提出了一种基于履带式移动机器人(Tracked Mobile Robots,TMR)的新型MRCTS,以提高地形适应性并扩展MRCTS的应用场景。
该研究以"Enhancing the terrain adaptability of a multirobot cooperative transportation system via novel connectors and optimized cooperative strategies"为题发表在Frontiers of Mechanical Engineering期刊,已被SCI收录。
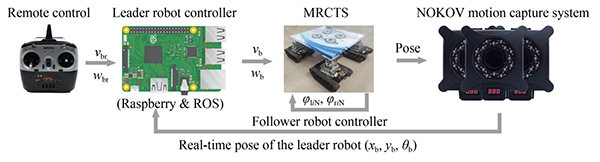
NOKOV度量动作捕捉系统收集领导机器人的实时位姿信息,帮助验证了所提出的运动学控制策略在真实环境中的性能和有效性。
引用格式
Liu, Quan & Gong, Zhao & Nie, Zhenguo & Liu, Xin-Jun. (2023). Enhancing the terrain adaptability of a multirobot cooperative transportation system via novel connectors and optimized cooperative strategies. Frontiers of Mechanical Engineering. 18. 1-19. 10.1007/s11465-023-0754-2.
研究亮点
-
设计了一种新颖的六自由度被动自适应关节来连接履带式移动机器人(TMR)和公共有效负载,使MRCTS获得了适应不平坦路面起伏的变形能力,此外,自适应关节上的接触传感器可以测量机器人相对于物体的位置和方向,进行反馈控制,解决了机器人在室外定位的难题。
-
提出了虚拟领导者和物理追随者协作范例。虚拟领导机器人用于描述整个系统的运动并管理跟随机器人,可避免由于物理领导机器人故障而导致整个系统的故障。此外,系统中的所有物理机器人都充当跟随机器人,有助于启动和维持运输,提高运输策略对物体质量的鲁棒性。
-
提出了一种新颖的双闭环运动学控制框架,其中内环与跟随机器人的运动控制相关,外环与虚拟领导机器人的运动控制相关。将两种机器人的运动控制转化为移动机器人的轨迹跟踪控制问题。
实验验证
研究团队进行了轨迹跟踪实验和室外非平整路面搬运实验,分别验证了控制器在自主模式下的性能,以及在远程控制模式下MRCTS对地形的适应性。
圆形轨迹跟踪实验
实验采用4个履带式移动机器人(TMR)协同运输重达 60 公斤的有效载荷以跟踪圆形轨迹。通过NOKOV度量动作捕捉系统获取领导机器人在 4.5×4.5m场地内的位置和方向信息,用于反馈控制。结果表明,领导机器人的跟踪误差在有限时间内收敛到零。因此,所提出的控制器有效地使系统在存在初始跟踪误差的情况下跟踪期望的轨迹。
新型自适应关节履带移动机器人挑战复杂路面
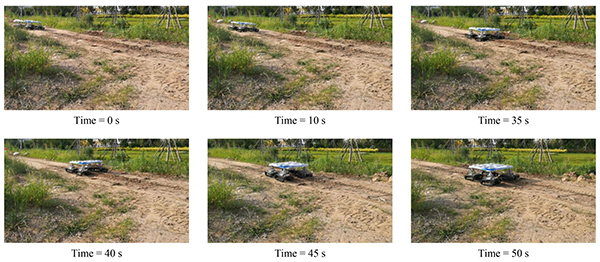
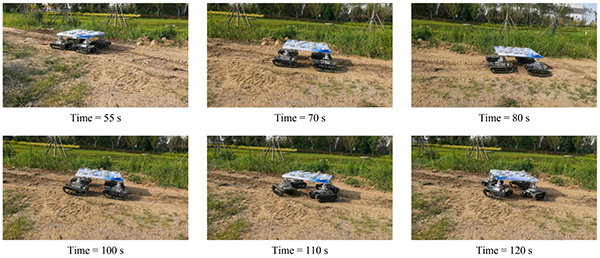
非平整路面搬运实验
实验采用基于TMR的MRCTS在不平坦的路面上运输重达60公斤的有效负载,以验证地形适应性。MRCTS 在远程控制模式下运行,其中领导机器人的目标速度被视为其控制速度,跟随机器人控制器接收领导机器人的目标速度,并将其转换为跟随机器人的目标速度。实验结果表明,基于TMR的MRCTS可以在不平坦的道路上成功地运输有效载荷,其表现出优异的地形适应性证明了自适应关节和控制策略设计的有效性。
NOKOV度量动作捕捉系统获取MRCTS领导机器人的实时位置和方向信息,用于反馈控制跟随机器人的轨迹跟踪,帮助验证了所提出的运动学控制策略在真实环境中的性能和有效性。