FPGA-DDS信号发生器
DDS基本原理
FPGA实现的DDS(直接数字频率合成)波形生成器是一种高效、灵活的数字信号生成技术,广泛应用于通信、雷达和测试设备中。其核心原理是通过数字计算生成特定频率的波形。
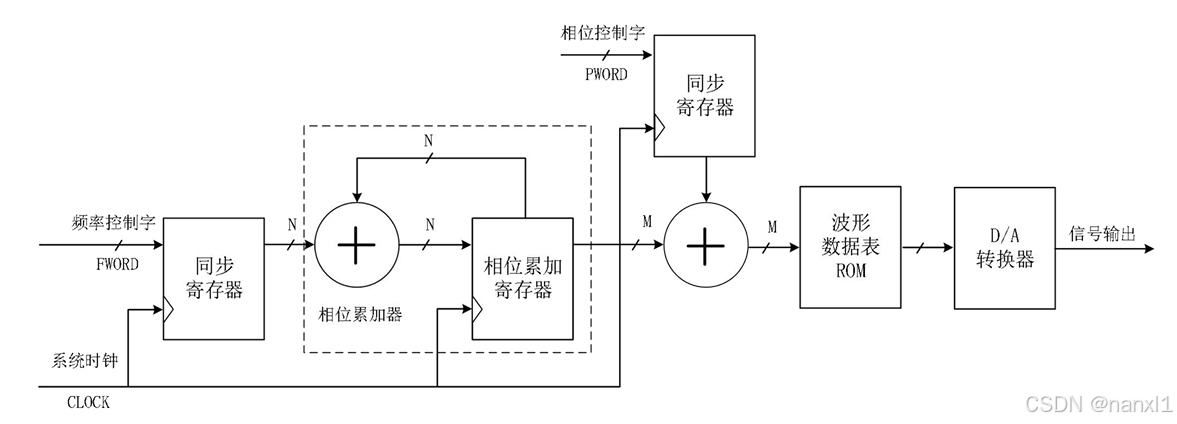
DDS通过相位累加、查找表(LUT)和数模转换(DAC) 三个步骤生成波形:
- 相位累加器: 以固定时钟频率 F c l k F_{clk} Fclk运行,每个时钟周期将当前相位值增加一个频率控制字M。相位值决定了波形的瞬时相位;
- 查找表(LUT): 存储预先计算的波形样本(如正弦波的离散幅度值)。相位累加器的输出作为地址索引,从LUT中读取对应幅值;
- 数模转换(DAC): 将数字幅值转换为模拟信号(需外部DAC)。若仅需数字输出(如仿真或数字处理),可省略DAC;
- 其输出频率公式为: F o u t = M 2 N F c l k F_{out}=\frac{M}{2^N}F_{clk} Fout=2NMFclk,其中N为累加器的位数。
ACM9767 DAC模块
ACM9767是一个高速双通道DAC模块,每个通道数据分辨率为14位 ,输出电压为±5V,且转换速率高达125MHz,非常适合信号发生器、数字调制通信等应用。
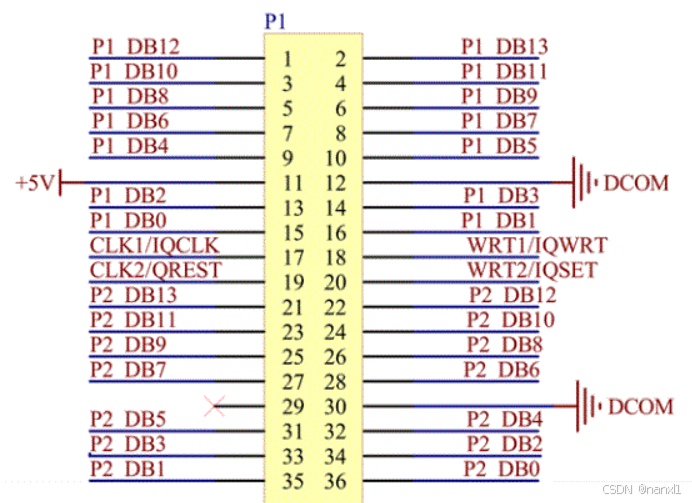
其引脚如下图所示,每个通道有14个数据引脚,1个时钟输入(CLK),一个写入使能(WRT),其中写入使能与CLK保持一致即可(根据芯片手册描述,CLK信号的上升沿必须提前或恰好和 WRT 信号的上升沿一起出现)。
总体设计
每个通道分别通过三个按键控制其生成信号的波形,频率和相位。其中频率的可选范围在1Hz-10MHz,每次按动按钮频率提高十倍。波形分为正弦波、三角波和方波。
DDS相关设计分三层。最底层为基本原理层,用三个ROM保存不同波形的信息,根据输入的频率字和相位字,输出一定频率的14位的Data。中间层模块中预设好能够选择的频率和相位,根据输入的频率选择字和相位选择字,得到对应的频率字和相位字,再调用最底层模块得到相应的Data输出。顶层模块例化两个中间层模块作为通道A和B,并例化6个按键,对两个通道的波形、频率和相位进行控制。
ACM9767模块
ACM9767模块为最底层模块,实现DDS信号发生器最底层的原理。主要实现的功能如图所示。其中D/A转换器的功能由外接硬件模块实现。
波形数据表ROM
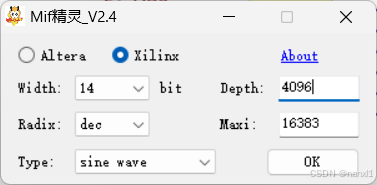
首先生成对应波形的LUT,LUT的深度为4096,也就是由4096个数据构成完整的波形,数据的位宽为14位(跟ACM9767的14位分辨率对应),波形用厂商提供的软件生成。如下图所示,生成正弦波形的数据。
然后创建ROM IP核,将LUT存储到ROM中。
具体步骤为,打开IP Catalog,然后搜索rom,双击Block Memory ...
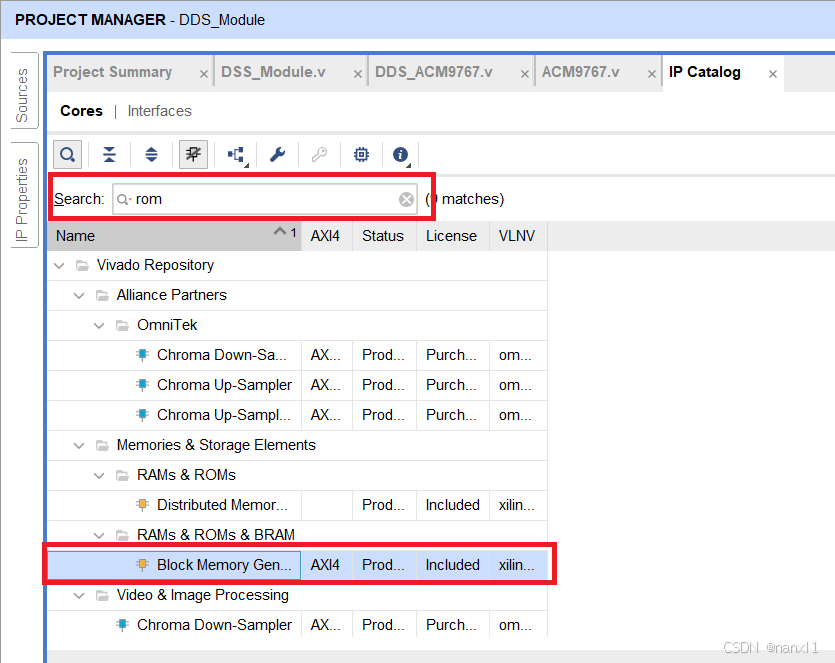
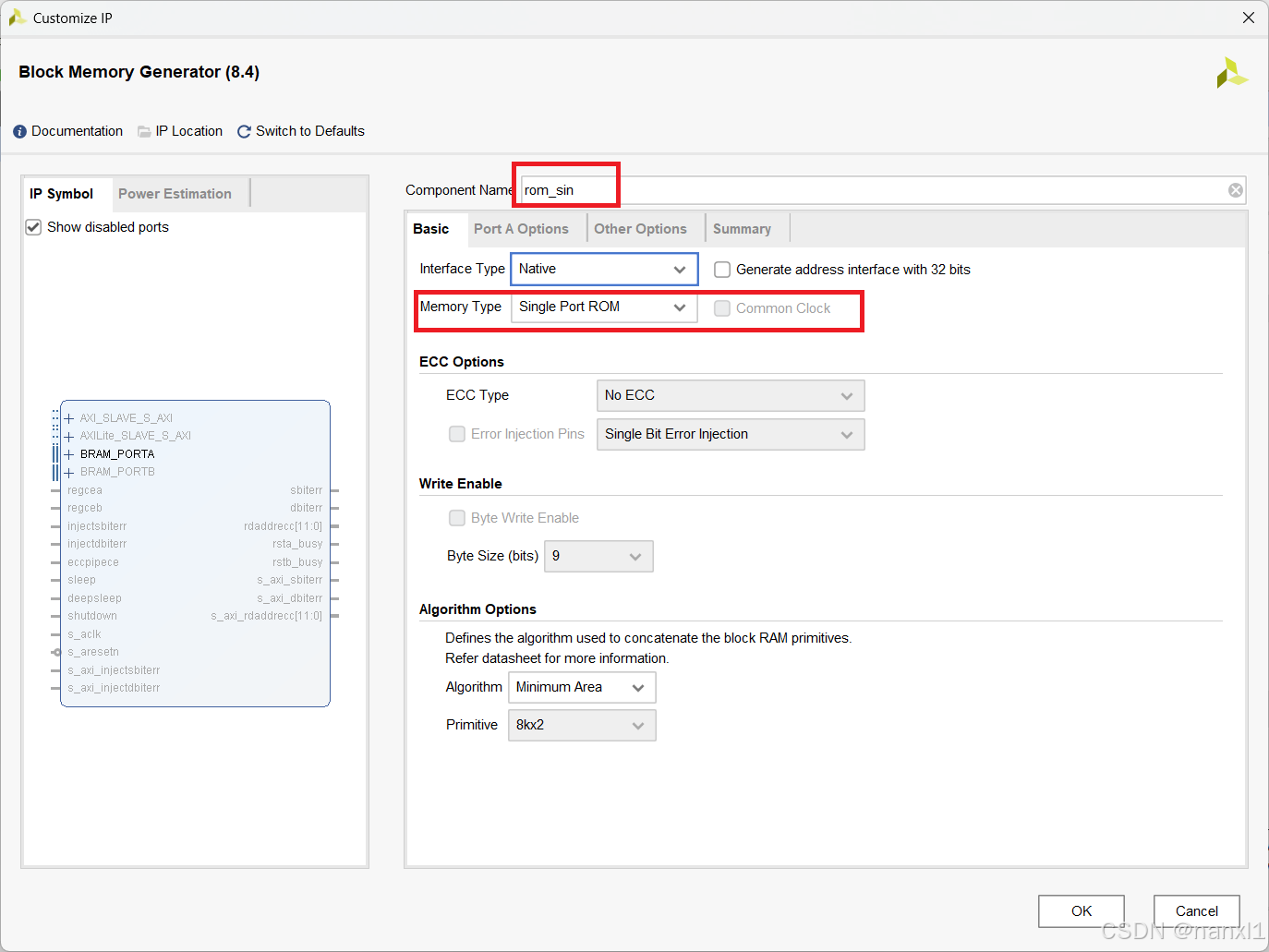
然后选择存储器类型为单口ROM,并将IP核名字改成rom_sin
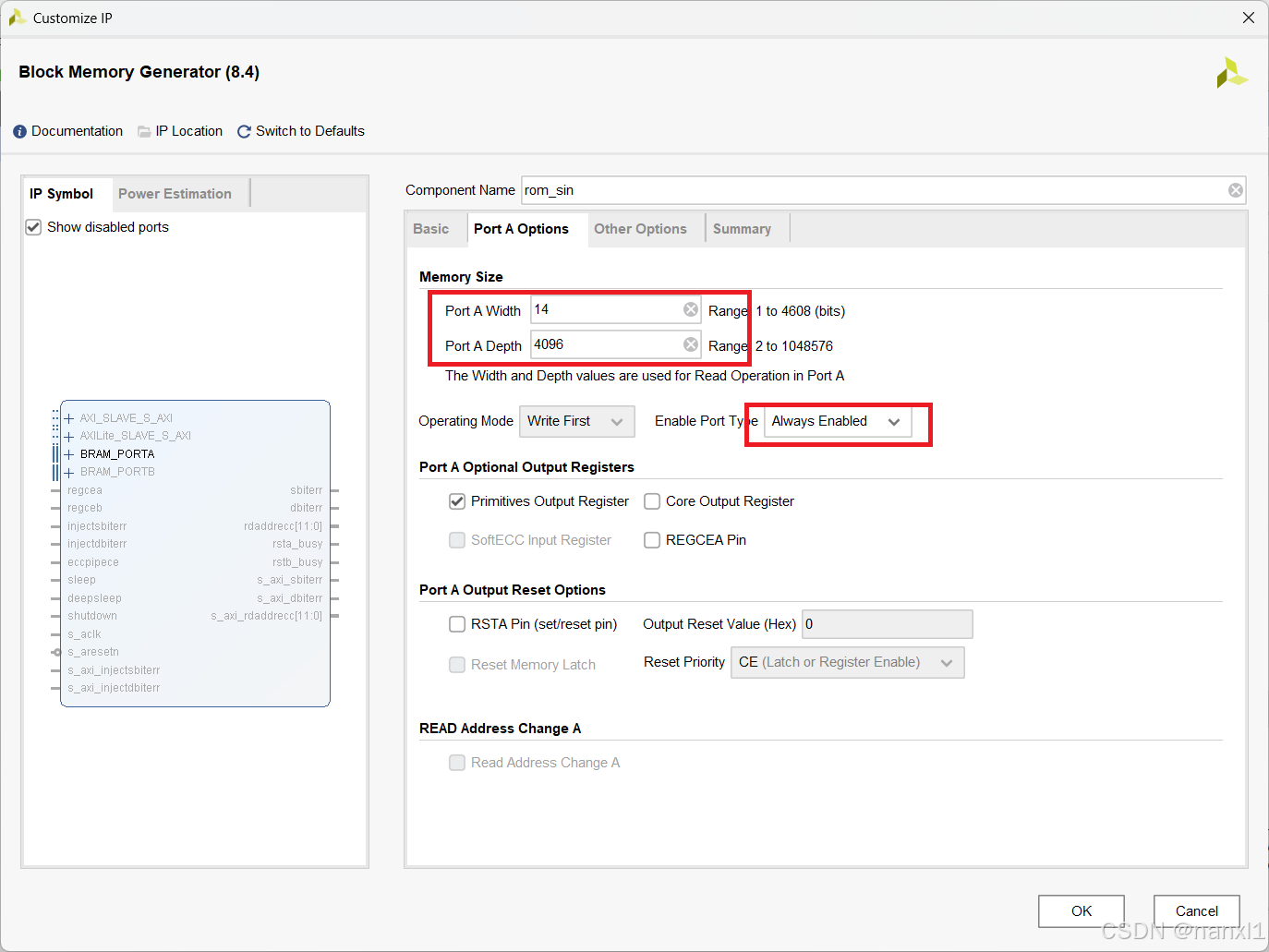
配置数据位宽为14,深度为4096,使能配置为一直使能即可
最后载入波形数据即可
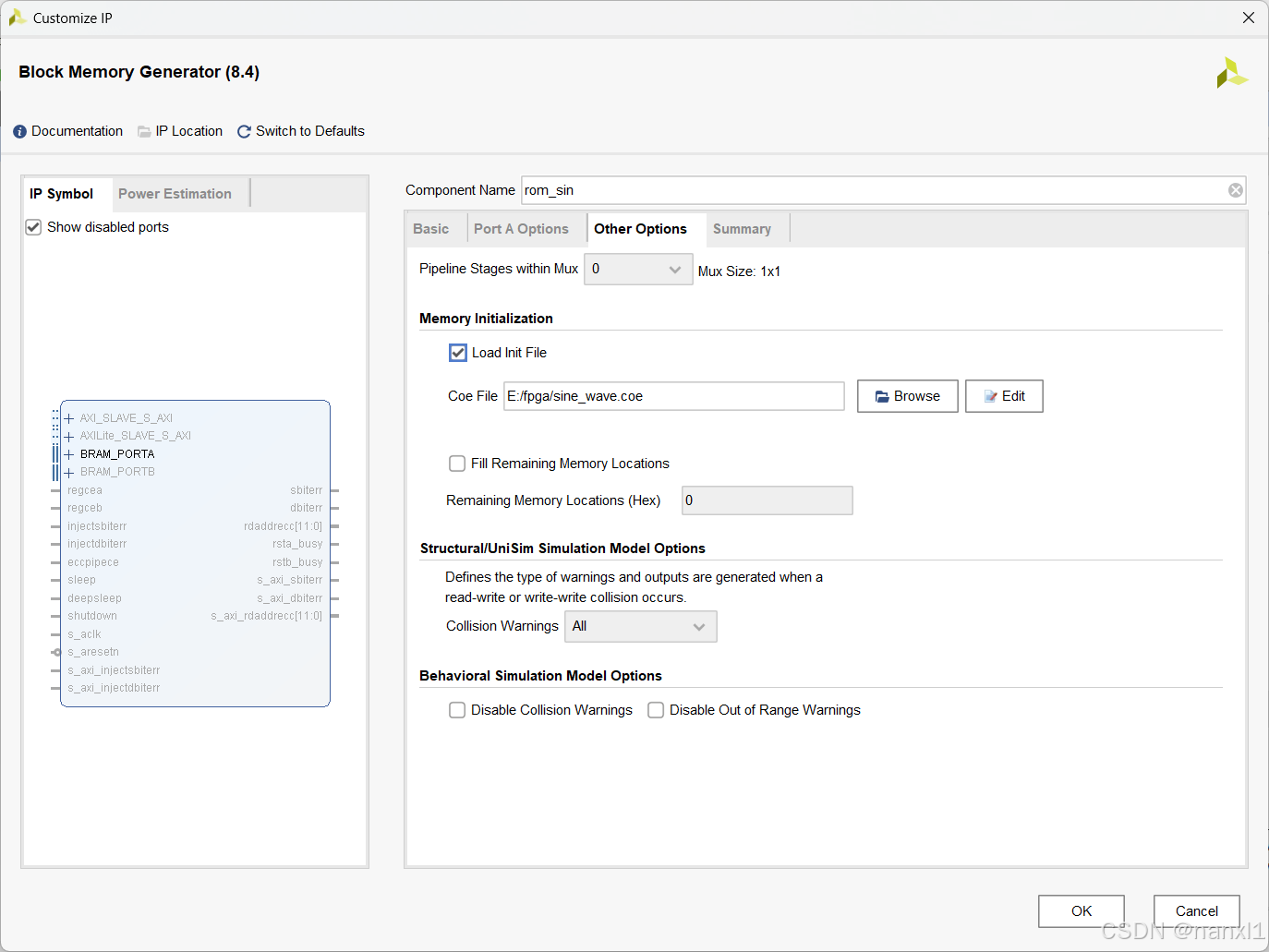
按照以上方法生成方波和三角波的波形和ROM
ACM9767.v
需要注意这里相位累加器(Freq_ACC )的位数设为32位,相位控制器的位数为12(因为数据的深度为 4096 = 2 12 4096=2^{12} 4096=212),则输出波形的频率为:
F o u t = M 2 32 ∗ F c l k F_{out}=\frac{M}{2^{32}}*F_{clk} Fout=232M∗Fclk
- Note: 实际中使用时, F c l k F_{clk} Fclk通过锁相环产生125MHz频率的时钟信号,但仿真文件中始终信号波形为50MHz
matlab
module ACM9767(
Clk,
Reset_n,
Model_Sel[1:0], // 选择时钟
Fword[31:0], // 频率控制字
Pword[11:0], // 相位控制字
Data[13:0] // 输出数据
);
input Clk;
input Reset_n;
input [1:0] Model_Sel;
input [31:0] Fword;
input [11:0] Pword;
output reg [13:0] Data;
// 频率控制字同步寄存器
reg [31:0] Fword_r;
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
Fword_r <= 0;
else
Fword_r <= Fword;
// 相位控制字同步寄存器
reg [11: 0] Pword_r;
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
Pword_r <= 0;
else
Pword_r <= Pword;
// 相位累加器
reg [31:0] Freq_ACC;
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
Freq_ACC <= 0;
else
Freq_ACC <= Fword_r + Freq_ACC;
// 波形数据表地址
wire [11:0] Rom_Addr;
assign Rom_Addr = Freq_ACC[31:20] + Pword_r;
// 三角波
wire [13: 0] Data_Tri;
rom_triangular rom_triangular_ins(
.clka(Clk),
.addra(Rom_Addr),
.douta(Data_Tri)
);
// 正弦波
wire [13: 0] Data_Sin;
rom_sin rom_sin_ins(
.clka(Clk),
.addra(Rom_Addr),
.douta(Data_Sin)
);
// 方波
wire [13:0] Data_Squ;
rom_square rom_square_ins(
.clka(Clk),
.addra(Rom_Addr),
.douta(Data_Squ)
);
// 输出波形选择
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
Data <= 0;
else begin
case(Model_Sel)
0: Data <= Data_Tri;
1: Data <= Data_Sin;
2: Data <= Data_Squ;
3: Data <= 0;
endcase
end
endmoduleACM9767_tb.v
matlab
`timescale 1ns / 1ns
module ACM9767_tb();
reg Clk;
reg Reset_n;
reg [1:0] Model_Sel;
reg [31:0] Fword;
reg [11:0] Pword;
wire [13:0] Data;
ACM9767 ACM9767_ins(
.Clk(Clk),
.Reset_n(Reset_n),
.Model_Sel(Model_Sel), // 选择时钟
.Fword(Fword), // 频率控制字
.Pword(Pword), // 相位控制字
.Data(Data) // 输出数据
);
initial Clk = 1;
always #10 Clk = !Clk;
initial begin
Reset_n = 0;
#201;
Reset_n = 1;
Model_Sel = 0;
Fword = 85899; // 1khz 1ms
Pword = 0;
#20000000;
$stop;
end
endmoduleDDS_ACM9767模块
DDS_ACM9767为中间模块,主要功能为根据计算出的频率字和相位字,预设频率和相位,并能通过频率选择字、相位选择字进行选择。
- Note: 该模块仿真中设定的 F c l k F_{clk} Fclk为125MHz
DDS_ACM9767.v
matlab
// 时钟为125MHz
module DDS_ACM9767(
Clk,
Reset_n,
Model_Sel[1:0],
Fword_Sel[2:0],
Pword_Sel[2:0],
Data[13:0]
);
input Clk;
input Reset_n;
input [1:0] Model_Sel;
input [2:0] Fword_Sel;
input [2:0] Pword_Sel;
output wire [13:0] Data;
// Fword
reg [31:0] Fword;
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
Fword <= 0;
else begin
case(Fword_Sel)
0: Fword <= 34; // 1Hz 1/(125MHz)/2^{32}
1: Fword <= 344; // 10Hz
2: Fword <= 3436; // 100Hz
3: Fword <= 34360; // 1KHz
4: Fword <= 343597; // 10KHz
5: Fword <= 3435974; // 100KHZ
6: Fword <= 34359738; // 1MHz
7: Fword <= 343597384; // 10MHz
default: Fword <= 0;
endcase
end
// Pword
reg [11:0] Pword;
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
Pword <= 0;
else begin
case(Pword_Sel)
0: Pword <= 0; // 0
1: Pword <= 341; // 30 4096 / 12
2: Pword <= 683; // 60
3: Pword <= 1024; // 90
4: Pword <= 1707; // 150
5: Pword <= 2048; // 180
6: Pword <= 3072; // 270
7: Pword <= 3641; // 320
default: Pword <= 0;
endcase
end
ACM9767 ACM9767_Ins(
.Clk(Clk),
.Reset_n(Reset_n),
.Model_Sel(Model_Sel), // 波形选择
.Fword(Fword), // 频率控制字
.Pword(Pword), // 相位控制字
.Data(Data) // 输出数据
);
endmoduleDDS_ACM9767_tb.v
matlab
`timescale 1ns / 1ns
module DDS_ACM9767_tb();
reg Clk;
reg Reset_n;
reg [1:0] Model_Sel_A;
reg [2:0] Fword_Sel_A;
reg [2:0] Pword_Sel_A;
wire [13: 0] DataA;
reg [1:0] Model_Sel_B;
reg [2:0] Fword_Sel_B;
reg [2:0] Pword_Sel_B;
wire [13: 0] DataB;
DDS_ACM9767 DDS_ACM9767_Ins_A(
.Clk(Clk),
.Reset_n(Reset_n),
.Model_Sel(Model_Sel_A),
.Fword_Sel(Fword_Sel_A),
.Pword_Sel(Pword_Sel_A),
.Data(DataA)
);
DDS_ACM9767 DDS_ACM9767_Ins_B(
.Clk(Clk),
.Reset_n(Reset_n),
.Model_Sel(Model_Sel_B),
.Fword_Sel(Fword_Sel_B),
.Pword_Sel(Pword_Sel_B),
.Data(DataB)
);
initial Clk = 1;
always #4 Clk = !Clk; //125MHz
initial begin
Reset_n = 0;
#201;
Reset_n = 1;
Model_Sel_A = 0;
Fword_Sel_A = 6; // 1MHz
Pword_Sel_A = 0;
Model_Sel_B = 0;
Fword_Sel_B = 6; // 1MHz
Pword_Sel_B = 3; // 90
#2000000;
Reset_n = 0;
#201;
Reset_n = 1;
Model_Sel_A = 1;
Fword_Sel_A = 5; // 1MHz
Pword_Sel_A = 0;
#2000000;
$stop;
end
endmoduleDDS_Module模块
该模块为顶层模块,例化两个DDS_ACM9767模块,并例化六个按键用于控制波形、频率和相位。由于晶振为50MHz有源晶振,要想使用125MHz的时钟信号来驱动ACM9767运行,需要通过锁相环(PLL)对基频信号 进行倍频 和分频 ,锁相环的配置可通过时钟管理单元IP核进行。
- Note: 用按键触发信号,作为
DDS_ACM9767模块的复位信号,当按下按键改变设置时,相应参数也重新复原。
时钟管理单元IP核
由于开发板上晶振为50MHz,需要使用时钟管理单元,生成125MHz信号。
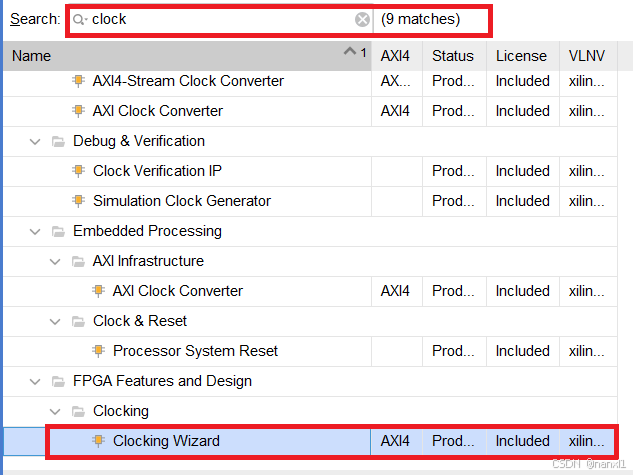
在IP Catlalog中找到Clocking Wizard
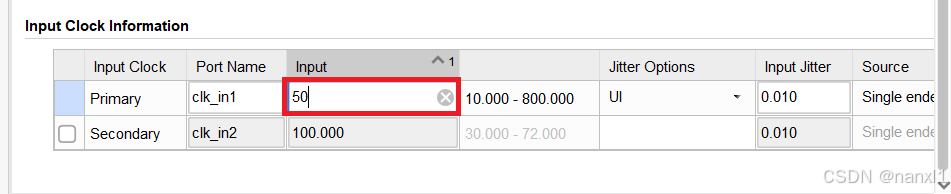
输入信号频率设为50MHz
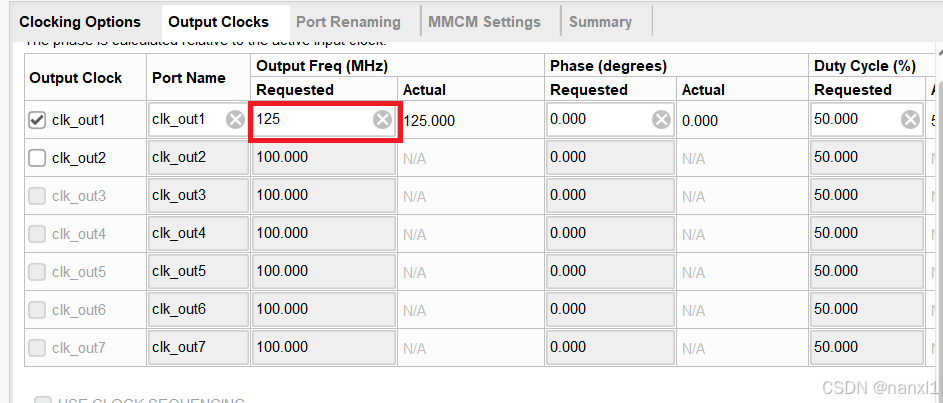
输出信号频率设为125MHz
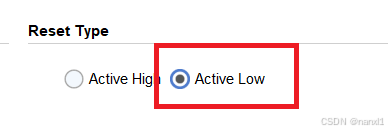
复位类型选择低电平触发(根据开发板硬件设计)
DDS_Module.v
matlab
module DSS_Module(
Clk,
Reset_n,
ClkA,
SkeyA,
FkeyA,
PkeyA,
WrtA,
ClkB,
SkeyB,
FkeyB,
PkeyB,
WrtB,
DataA[13:0],
DataB[13:0]
);
input Clk;
input Reset_n;
input SkeyA;
input FkeyA;
input PkeyA;
input SkeyB;
input FkeyB;
input PkeyB;
output wire ClkA;
output wire ClkB;
output wire WrtA;
output wire WrtB;
output wire [13:0] DataA;
output wire [13:0] DataB;
// clock
wire Clk125MHz;
wire locked;
// DDS_ACM9767
reg [1:0] Model_Sel_A;
reg [2:0] Fword_Sel_A;
reg [2:0] Pword_Sel_A;
reg [1:0] Model_Sel_B;
reg [2:0] Fword_Sel_B;
reg [2:0] Pword_Sel_B;
// key
wire Press_Flag_SkeyA;
wire Release_Flag_SkeyA;
wire filter_state_SkeyA;
wire Press_Flag_FkeyA;
wire Release_Flag_FkeyA;
wire filter_state_FkeyA;
wire Press_Flag_PkeyA;
wire Release_Flag_PkeyA;
wire filter_state_PkeyA;
wire Press_Flag_SkeyB;
wire Release_Flag_SkeyB;
wire [1:0] filter_state_SkeyB;
wire Press_Flag_FkeyB;
wire Release_Flag_FkeyB;
wire [1:0] filter_state_FkeyB;
wire Press_Flag_PkeyB;
wire Release_Flag_PkeyB;
wire [1:0] filter_state_PkeyB;
wire Reset_A;
wire Reset_B;
assign Reset_A = Release_Flag_SkeyA | Release_Flag_FkeyA | Release_Flag_PkeyA;
assign Reset_B = Release_Flag_SkeyB | Release_Flag_FkeyB | Release_Flag_PkeyB;
assign ClkA = Clk125MHz;
assign ClkB = Clk125MHz;
assign WrtA = ClkA;
assign WrtB = ClkB;
// 时钟管理单元生成125MHz时钟
clk_wiz_0 clk_125_ins(
.Clk125MHz(Clk125MHz), // output Clk125MHz
.resetn(Reset_n), // input rese
.locked(locked), // output locked
// Clock in ports
.clk_in1(Clk)
);
// 例化DDS_ACM9767
DDS_ACM9767 DDS_ACM9767_Ins_A(
.Clk(Clk125MHz),
.Reset_n(!Reset_A),
// .Reset_n(Reset_n),
.Model_Sel(Model_Sel_A),
.Fword_Sel(Fword_Sel_A),
.Pword_Sel(Pword_Sel_A),
.Data(DataA)
);
DDS_ACM9767 DDS_ACM9767_Ins_B(
.Clk(Clk125MHz),
.Reset_n(!Reset_B),
// .Reset_n(Reset_n),
.Model_Sel(Model_Sel_B),
.Fword_Sel(Fword_Sel_B),
.Pword_Sel(Pword_Sel_B),
.Data(DataB)
);
// 例化Key_Filter
key_filter key_filter_SkeyA(
.Clk(Clk125MHz),
.Reset_n(Reset_n),
.signal(SkeyA),
.Press_Flag(Press_Flag_SkeyA),
.Release_Flag(Release_Flag_SkeyA),
.filter_state(filter_state_SkeyA),
.result()
);
key_filter key_filter_FkeyA(
.Clk(Clk125MHz),
.Reset_n(Reset_n),
.signal(FkeyA),
.Press_Flag(Press_Flag_FkeyA),
.Release_Flag(Release_Flag_FkeyA),
.filter_state(filter_state_FkeyA),
.result()
);
key_filter key_filter_PkeyA(
.Clk(Clk125MHz),
.Reset_n(Reset_n),
.signal(PkeyA),
.Press_Flag(Press_Flag_PkeyA),
.Release_Flag(Release_Flag_PkeyA),
.filter_state(filter_state_PkeyA),
.result()
);
key_filter key_filter_SkeyB(
.Clk(Clk125MHz),
.Reset_n(Reset_n),
.signal(SkeyB),
.Press_Flag(Press_Flag_SkeyB),
.Release_Flag(Release_Flag_SkeyB),
.filter_state(filter_state_SkeyB),
.result()
);
key_filter key_filter_FkeyB(
.Clk(Clk125MHz),
.Reset_n(Reset_n),
.signal(FkeyB),
.Press_Flag(Press_Flag_FkeyB),
.Release_Flag(Release_Flag_FkeyB),
.filter_state(filter_state_FkeyB),
.result()
);
key_filter key_filter_PkeyB(
.Clk(Clk125MHz),
.Reset_n(Reset_n),
.signal(PkeyB),
.Press_Flag(Press_Flag_PkeyB),
.Release_Flag(Release_Flag_PkeyB),
.filter_state(filter_state_PkeyB),
.result()
);
// Model_Sel_A
always@(posedge Clk125MHz or negedge Reset_n)
if(!Reset_n)
Model_Sel_A <= 0;
else if(Release_Flag_SkeyA && (filter_state_SkeyA == 0))
Model_Sel_A <= Model_Sel_A + 1;
// Fword_Sel_A
always@(posedge Clk125MHz or negedge Reset_n)
if(!Reset_n)
Fword_Sel_A <= 3; // 1khz
else if(Release_Flag_FkeyA && (filter_state_FkeyA == 0))
Fword_Sel_A <= Fword_Sel_A + 1;
// Pword_Sel_A
always@(posedge Clk125MHz or negedge Reset_n)
if(!Reset_n)
Pword_Sel_A<= 0;
else if(Release_Flag_PkeyA && (filter_state_PkeyA == 0))
Pword_Sel_A <=Pword_Sel_A + 1;
// Model_Sel_B
always@(posedge Clk125MHz or negedge Reset_n)
if(!Reset_n)
Model_Sel_B <= 1;
else if(Release_Flag_SkeyB && (filter_state_SkeyB == 0))
Model_Sel_B <= Model_Sel_B + 1;
// Fword_Sel_B
always@(posedge Clk125MHz or negedge Reset_n)
if(!Reset_n)
Fword_Sel_B <= 3;
else if(Release_Flag_FkeyB && (filter_state_FkeyB == 0))
Fword_Sel_B <= Fword_Sel_B + 1;
// Pword_Sel_B
always@(posedge Clk125MHz or negedge Reset_n)
if(!Reset_n)
Pword_Sel_B<= 0;
else if(Release_Flag_PkeyB && (filter_state_PkeyB == 0))
Pword_Sel_B <= Pword_Sel_B + 1;
endmoduleDDS_Module_tb.v
- Note: 由于信号较多,软件仿真的速度很慢,不利于调试,仅供参考,推荐使用ILA硬件调试。(ILA硬件调试方法会在后面小节具体介绍)
matlab
`timescale 1ns / 1ns
// Not in use
module DDS_Module_tb();
reg Clk;
reg Reset_n;
reg SkeyA;
reg FkeyA;
reg PkeyA;
reg SkeyB;
reg FkeyB;
reg PkeyB;
wire ClkA;
wire ClkB;
wire [13:0] DataA;
wire [13:0] DataB;
DSS_Module DSS_Module_ins(
.Clk(Clk),
.Reset_n(Reset_n),
.ClkA(ClkA),
.SkeyA(SkeyA),
.FkeyA(FkeyA),
.PkeyA(PkeyA),
.WrtA(),
.ClkB(ClkB),
.SkeyB(SkeyB),
.FkeyB(FkeyB),
.PkeyB(PkeyB),
.WrtB(),
.DataA(DataA),
.DataB(DataB)
);
initial Clk = 1;
always #10 Clk = !Clk;
reg [31: 0] rand;
initial begin
Reset_n = 0;
#201;
Reset_n = 1;
press_skeyA(0);
press_pkeyA(0);
press_fkeyA(0);
$stop;
end
task press_skeyA;
input [3:0] seed;
begin
SkeyA = 1;
#20000000;
repeat(5)begin
rand = {$random} % 10000000; // 10ms以内的抖动
#rand SkeyA = ~SkeyA;
end
SkeyA = 0;
#20000000;
repeat(5)begin
rand = {$random} % 10000000; // 10ms以内的抖动
#rand SkeyA = ~SkeyA;
end
SkeyA = 1;
#20000000;
#20000000;
end
endtask
task press_fkeyA;
input [3:0] seed;
begin
FkeyA = 1;
#20000000;
repeat(5)begin
rand = {$random} % 10000000; // 10ms以内的抖动
#rand FkeyA = ~FkeyA;
end
FkeyA = 0;
#20000000;
repeat(5)begin
rand = {$random} % 10000000; // 10ms以内的抖动
#rand FkeyA = ~FkeyA;
end
FkeyA = 1;
#20000000;
#20000000;
end
endtask
task press_pkeyA;
input [3:0] seed;
begin
PkeyA = 1;
#20000000;
repeat(5)begin
rand = {$random} % 10000000; // 10ms以内的抖动
#rand PkeyA = ~PkeyA;
end
PkeyA = 0;
#20000000;
repeat(5)begin
rand = {$random} % 10000000; // 10ms以内的抖动
#rand PkeyA = ~PkeyA;
end
PkeyA = 1;
#20000000;
#20000000;
end
endtask
endmodulekey_filter模块
按键模块,进行20ms的消抖处理,若时钟频率改变,则需要修改对于计数器的最大计数值,这里支持的是125MHz的频率。
key_filter.v
matlab
// 按键消抖 等待按键按下(下降沿) --->消抖, 若20ms没出现上升沿 ---> 按键已按下---?等待释放 ---> 20ms? --->已释放
module key_filter(
Clk,
Reset_n,
signal,
Press_Flag,
Release_Flag,
filter_state,
result
);
input Clk;
input Reset_n;
input signal;
output reg Press_Flag;
output reg Release_Flag;
output reg [1:0] filter_state;
output reg result;
// 多级寄存器缓解亚稳态现象
reg [1: 0] sync_reg;
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
sync_reg <= 0;
else
sync_reg <= {sync_reg[0], signal};
// 边缘检测器
reg [1:0] edge_reg;
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
edge_reg <= 0;
else
edge_reg <= {edge_reg[0], sync_reg[1]};
wire pos_edge;
assign pos_edge = (edge_reg == 2'b01);
wire neg_edge;
assign neg_edge = (edge_reg == 2'b10);
reg [23:0] cnt;
// filter_state
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
filter_state <= 0;
else if(filter_state == 0)begin
if(neg_edge)
filter_state <= 1;
end
else if(filter_state == 1)begin
if(pos_edge)
filter_state <= 0; // 回到等待状态
else if(cnt == 2500000 - 1)// 20ms
filter_state <= 2;
end
else if(filter_state == 2)begin
if(pos_edge) // 出现上升沿
filter_state <= 3; // 进入释放消抖
end
else if(filter_state == 3)begin
if(neg_edge)
filter_state <= 2;
else if(cnt == 2500000 - 1)
filter_state <= 0;
end
// Press_Flag
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
Press_Flag <= 0;
else if(filter_state == 1 && (cnt == 2500000 - 1))
Press_Flag <= 1;
else if(filter_state == 2)
Press_Flag <= 0;
// Release_Flag
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
Release_Flag <= 0;
else if(filter_state == 0)
Release_Flag <= 0;
else if(filter_state == 3 && (cnt == 2500000 - 1))
Release_Flag <= 1;
// result
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
result <= 1;
else if(filter_state == 1 && (cnt == 2500000 - 1))
result <= 0;
else if(filter_state == 3 && (cnt == 2500000 - 1))
result <= 1;
// cnt
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
cnt <= 0;
else if(filter_state == 1)begin
cnt <= cnt + 1;
if(pos_edge)
cnt <= 0;
else if(cnt == 2500000 - 1)
cnt <= 0;
end
else if(filter_state == 3)begin
cnt <= cnt + 1;
if(neg_edge)
cnt <= 0;
else if(cnt == 2500000 - 1)
cnt <= 0;
end
endmodulekey_filter_tb.v
matlab
`timescale 1ns / 1ns
module key_filter_tb();
reg Clk;
reg Reset_n;
reg signal;
wire Press_Flag;
wire Release_Flag;
wire [1:0] filter_state;
wire result;
key_filter key_filter_ins(
.Clk(Clk),
.Reset_n(Reset_n),
.signal(signal),
.Press_Flag(Press_Flag),
.Release_Flag(Release_Flag),
.filter_state(filter_state),
.result(result)
);
initial Clk = 1;
always #4 Clk = !Clk;
reg [31: 0] rand;
initial begin
Reset_n = 0;
#201;
Reset_n = 1;
#20;
press_key(0);
$stop;
end
task press_key;
input [3:0] seed;
begin
signal = 1;
#20000000;
repeat(5)begin
rand = {$random} % 10000000; // 10ms以内的抖动
#rand signal = ~signal;
end
signal = 0;
#20000000;
repeat(5)begin
rand = {$random} % 10000000; // 10ms以内的抖动
#rand signal = ~signal;
end
signal = 1;
#20000000;
#20000000;
end
endtask
endmoduleILA硬件调试方法
ILA的使用方式有很多,这里就讲一种我比较喜欢的方式。
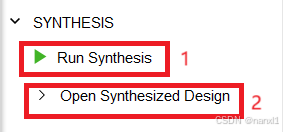
首先,运行综合,后打开综合设计器。
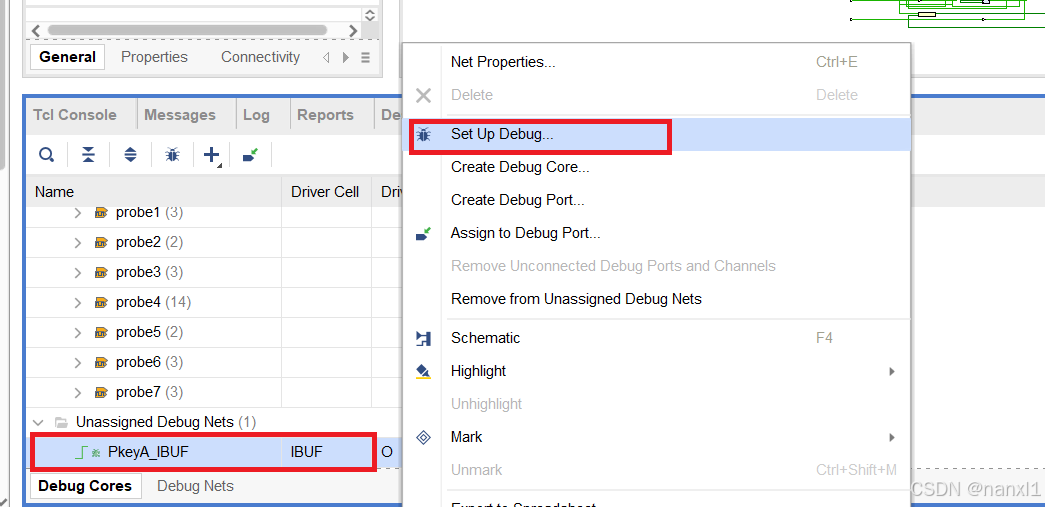
然后在netlist里面,可以选择感兴趣的信号设置debug,被选中的信号左边会有个小爬虫
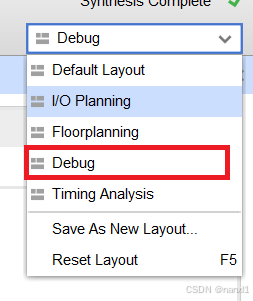
右上角选择Debug界面
在Debug界面为没有分配ILA IP核的信号,创建或分配一个探针
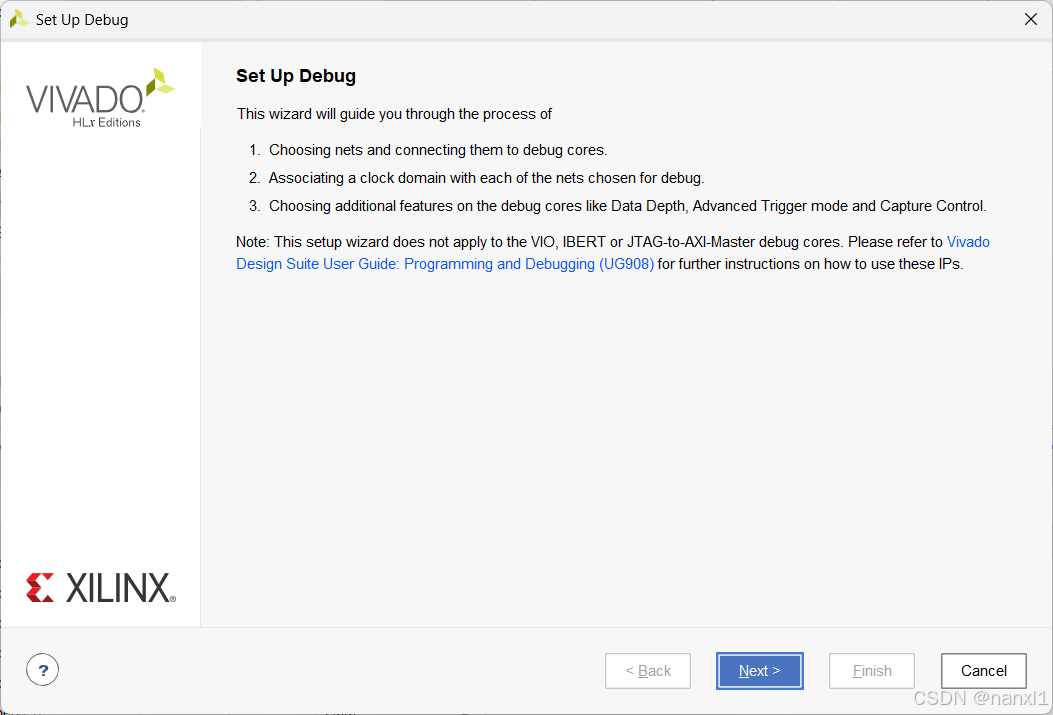
进入到ILA IP核向导界面
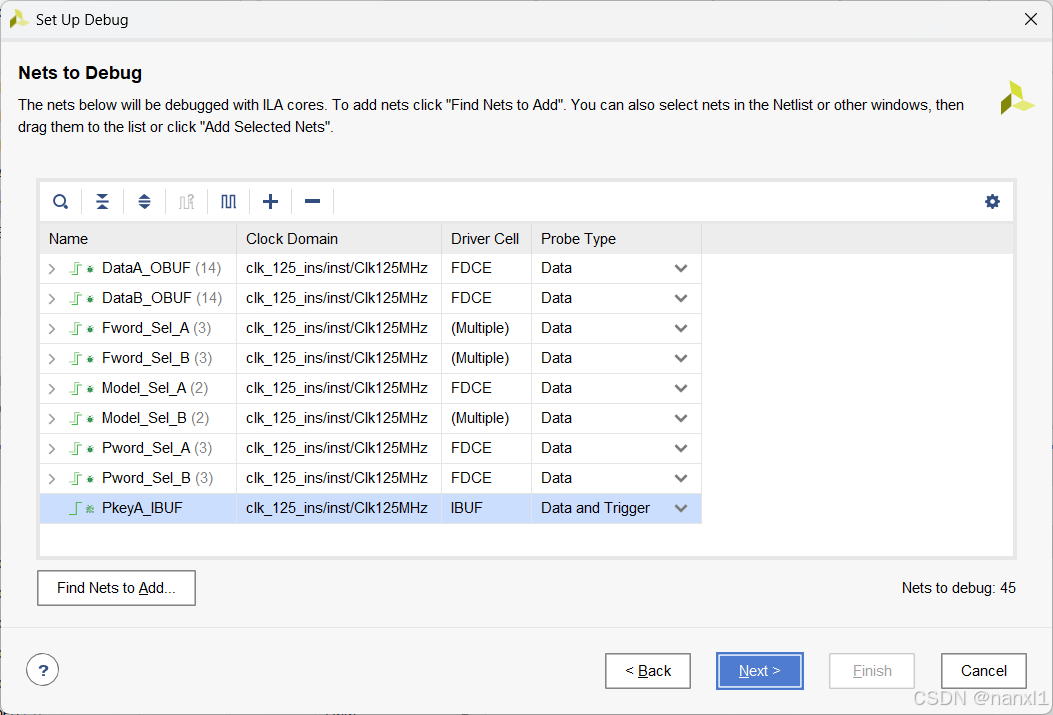
跟着向导走,直到来到以下界面,该界面可以配置需要debug信号探针的类型,Data、Trigger Data&Trigger,触发类型信号,设置触发条件后,当达到触发条件时,ILA会对信号进行采样。这里我们只想看看按键按下后,对应的选择字位有没有变化,因此设置成Data类型的探针就好,当按下开发板按键后,手动触发信号采样。
- PkeyA_IBUF: 是为了展示使用ILA过程。
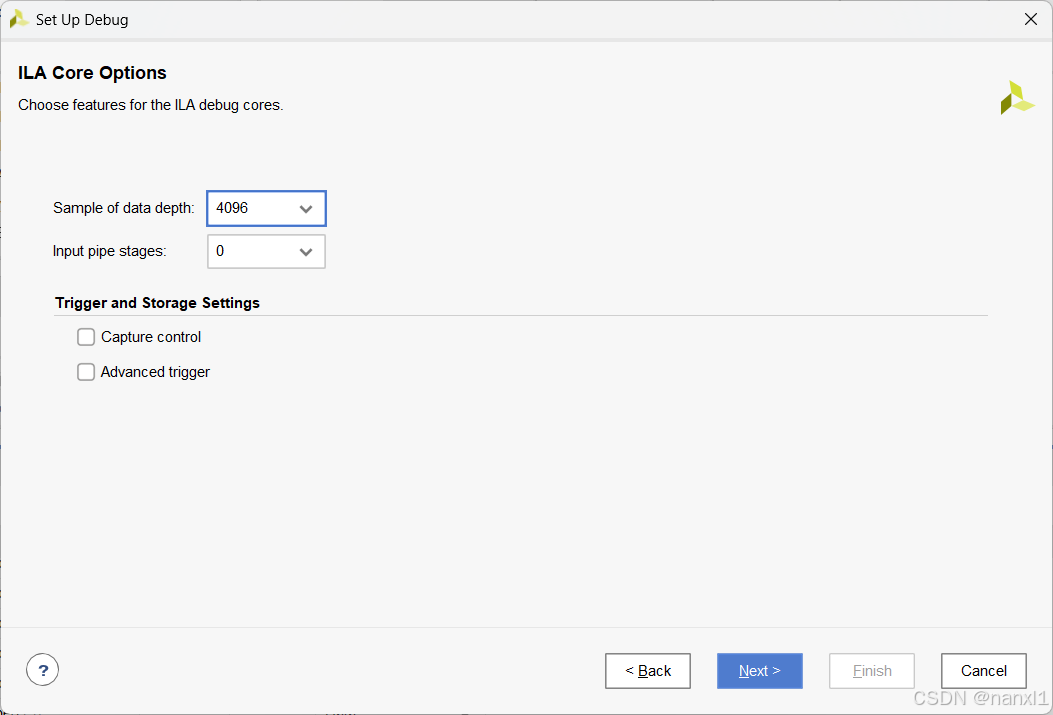
然后选择合适的深度,就是一次采样中,采样点的个数
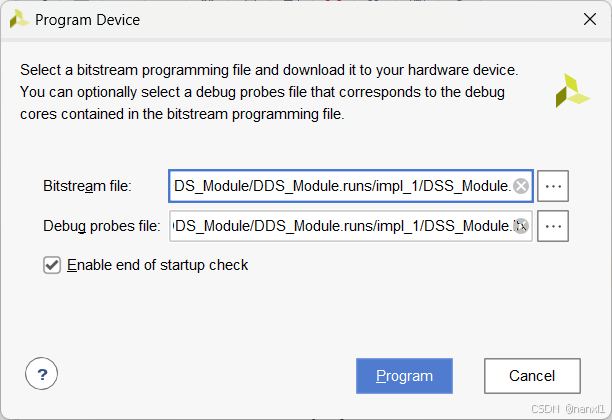
设置完成后,正常流程生产比特流文件即可。然后当连接到硬件时,Vivado 会将比特流文件和调试文件一起烧录到开发板中。
然后可以看到ILA的界面,点击触发按钮手动触发一次采样。
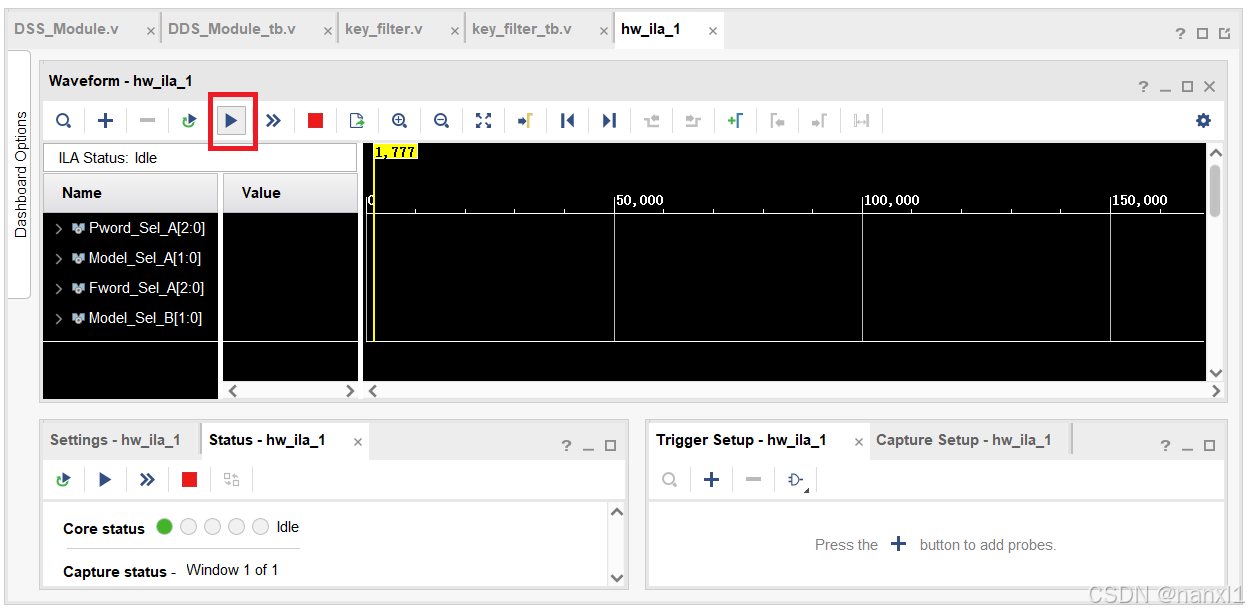
可以看到采样到的值
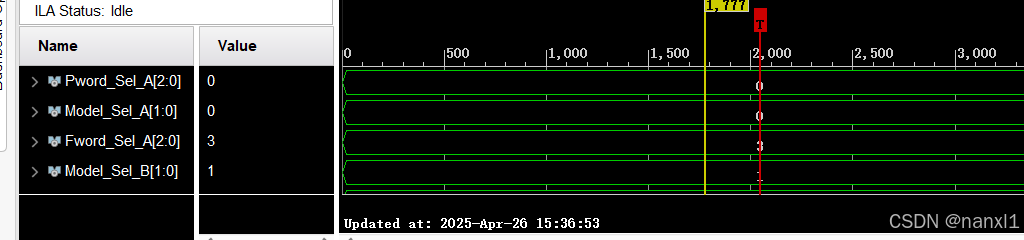
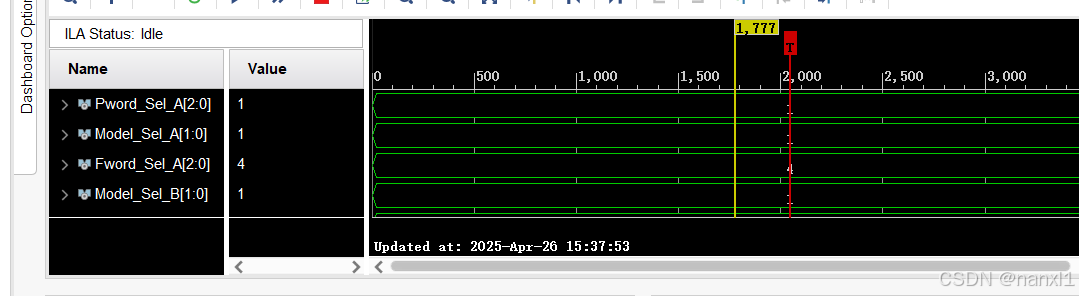
按下开发板上的按键,再重新手动触发采样,看看值是否有改变,若改变,则说明按键部分的功能实现无误。
ILA还能设置触发条件进行采样,在有些应用中只能通过该方法进行调试,具体方法自行了解。
实验现象
看看效果
FPGA-DDS
相关硬件
小梅哥FPGA ACX720
FPGA芯片型号: XC7A35TFGG484ABX2l
DMA: ACM9767
示波器: 正点原子