一.背景:
从工业革命时期的机械自动化,到信息时代的智能自动化,人类对自动化技术的追求从未停歇。近年来,随着物联网、大数据、云计算等技术的蓬勃发展,自动化系统的复杂度与智能化程度显著提升。算法与深度学习的深度介入,使得自动化设备不仅能够执行预设指令,更具备自主学习、智能决策的能力。这种变革正在重塑工业制造、交通运输、医疗健康等多个领域的生产与服务模式,成为推动社会经济发展的关键技术引擎。 在工业 4.0 与智能制造的大背景下,自动化设备需要处理海量且复杂的数据,传统的规则驱动型系统已难以满足需求。例如,在汽车生产线中,每分钟需要检测数百个零部件的尺寸与缺陷,人工设定的检测规则无法适应产品型号的快速迭代;而深度学习算法通过对大量图像数据的学习,能够自动识别复杂缺陷模式,将检测准确率提升至 99% 以上。此外,在智能交通领域,城市交通网络产生的动态数据规模庞大,依赖算法对交通流量进行实时预测与优化,才能有效缓解拥堵问题。
二、自动化应用中的经典算法
2.1 遗传算法(Genetic Algorithm, GA)
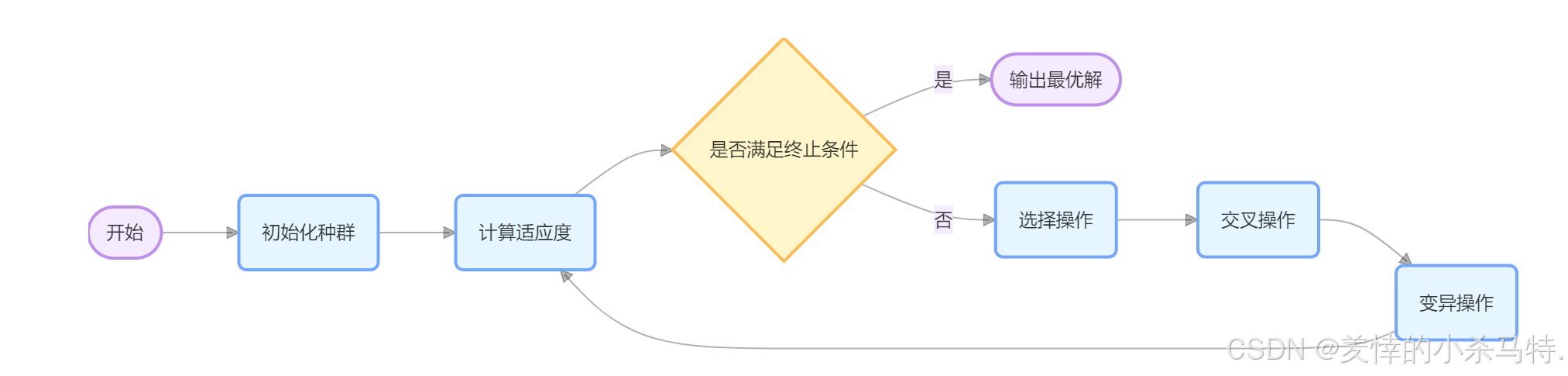
遗传算法源于达尔文生物进化论,通过模拟自然选择、遗传和变异过程,在解空间中进行全局搜索。其核心操作包括:
- 编码:将问题的解编码为「染色体」(如二进制串或实数向量)。例如,在旅行商问题(TSP)中,可以将城市访问顺序编码为一个整数序列;在参数优化问题中,常采用实数编码直接表示参数值。
- 选择:依据适应度函数筛选优秀个体。常见的选择策略包括轮盘赌选择、锦标赛选择等。轮盘赌选择根据个体适应度占种群总适应度的比例决定选择概率;锦标赛选择则通过随机选取一定数量个体进行竞争,胜者进入下一代。
- 交叉:模拟基因重组生成新个体。单点交叉、多点交叉和均匀交叉是常用的交叉方式。例如,单点交叉在染色体上随机选择一个交叉点,交换两个父代染色体在该点后的基因片段。
- 变异:随机改变基因片段以维持种群多样性。变异概率通常设置较低(如 0.01),避免破坏优秀个体,但可有效防止算法陷入局部最优。
典型应用:
- 生产调度优化:在汽车制造车间中,通过遗传算法优化生产线任务分配,缩短生产周期。某汽车厂商应用遗传算法对发动机装配线进行调度,将生产节拍从 120 秒降低至 95 秒,产能提升 20% 以上。
- 参数优化:调整机器人运动学参数,提升运动精度。例如,在工业机械臂的逆运动学求解中,遗传算法可优化关节角度参数,使末端执行器更精准地到达目标位置。
技术特点:
全局搜索能力强,适用于复杂非线性问题,尤其在解空间规模庞大、传统方法难以求解时优势明显。
对初始条件不敏感,但计算复杂度高,(N 为种群规模,T 为迭代次数,L 为染色体长度),随着问题规模增大,计算时间呈指数级增长。
易出现早熟收敛现象,即算法过早地陷入局部最优解,无法找到全局最优。通过调整交叉、变异概率和种群规模可在一定程度上缓解该问题。
2.2 蚁群算法(Ant Colony Optimization, ACO)
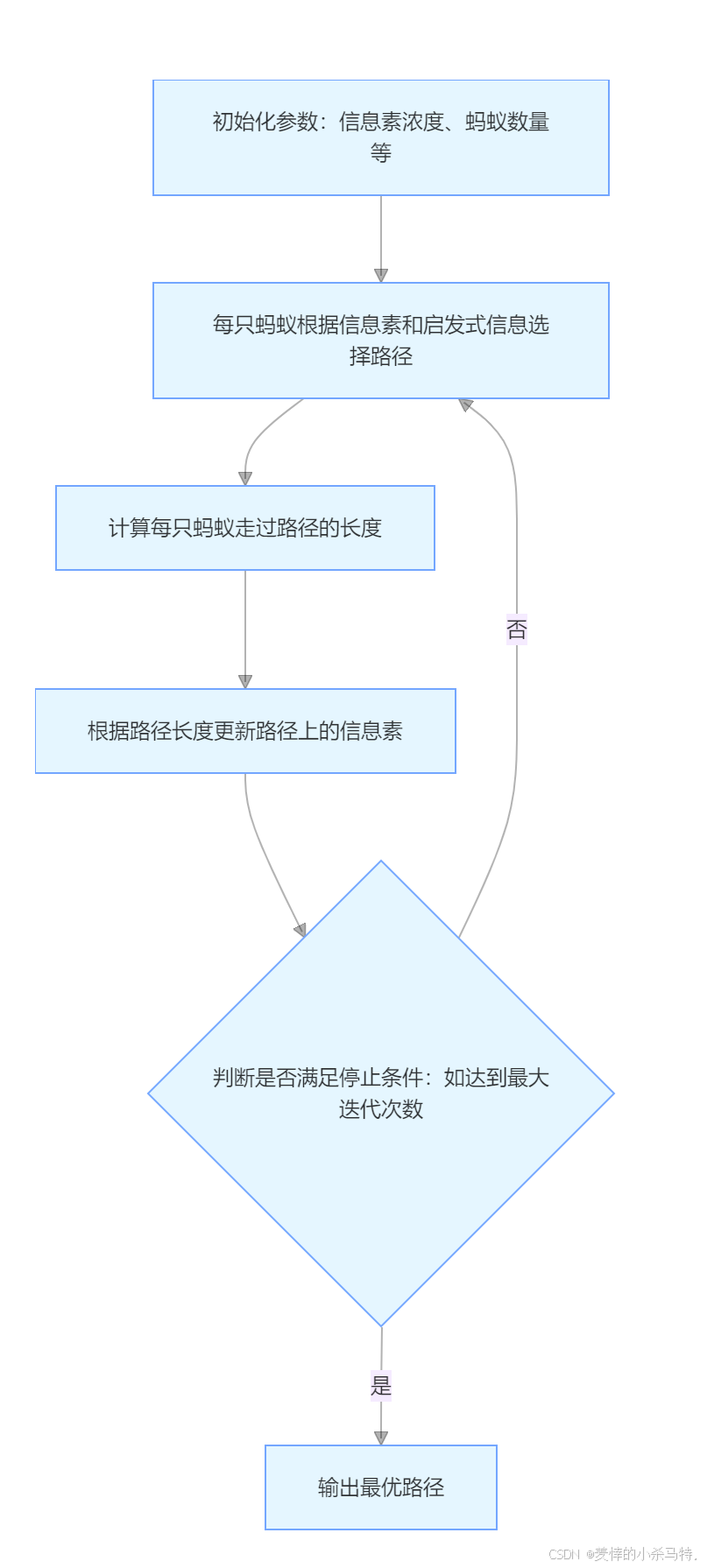
蚁群算法模拟蚂蚁通过信息素交流觅食的行为,其核心机制:
- 信息素更新:蚂蚁在路径上释放信息素,路径越短信息素浓度越高。信息素会随时间自然挥发,同时蚂蚁经过时会加强路径上的信息素。
- 状态转移概率:蚂蚁根据信息素浓度和启发式信息选择下一个节点。启发式信息通常与目标节点的距离相关,距离越近,选择概率越高。
- 正反馈机制:短路径上信息素积累更快,吸引更多蚂蚁,形成良性循环,最终收敛到最优路径。
应用案例:
- 物流配送路径规划:在电商仓储物流中,优化货车配送路线,降低运输成本。某物流企业应用蚁群算法对全国范围内的配送路线进行优化,使车辆行驶里程减少 15%,配送时效提升 10%。
- 机器人路径规划:在未知环境中引导无人机避开障碍物,规划最优航迹。例如,在森林火灾救援中,无人机利用蚁群算法实时规划避开浓烟和山体的路径,快速抵达着火点。
优缺点:
擅长处理动态环境和 NP 难问题,能够在环境变化时快速调整路径规划策略。
收敛速度较慢,尤其是在算法初期,信息素浓度较低,蚂蚁探索效率不高;且参数(如信息素挥发系数、启发式因子)需精细调整,否则可能影响算法性能。
技术特性:
算法结构简单,易于实现,无需复杂的数学推导和梯度计算。
收敛速度快,尤其在处理低维问题时,能够迅速找到较优解;但在高维问题中易陷入局部最优,需要结合多种策略(如动态调整惯性权重、引入多样性机制)进行改进。
三、深度学习在自动化领域的创新应用
3.1 深度学习基础架构解析
3.1.1 卷积神经网络(CNN)

CNN 通过卷积层、池化层和全连接层实现特征自动提取,核心组件:
- 卷积层:通过卷积核提取局部特征(如图像边缘、纹理)。卷积核在输入数据上滑动,通过卷积运算提取不同位置的特征,多个卷积核可提取多种类型的特征。例如,3×3 的卷积核可提取图像的局部细节,而 5×5 的卷积核则能捕捉更广泛的上下文信息。
- 池化层:降低数据维度,提升模型泛化能力。常见的池化方式有最大池化和平均池化。最大池化选取池化窗口内的最大值,保留显著特征;平均池化则计算窗口内的平均值,平滑数据。
- 反向传播:利用梯度下降优化网络参数。通过计算损失函数对网络参数的梯度,沿着梯度反方向更新参数,以最小化损失函数。
典型架构:
- LeNet:首个成功应用于手写数字识别的 CNN,包含卷积层、池化层和全连接层,奠定了 CNN 的基本结构。
- ResNet:引入残差连接解决深度网络梯度消失问题,使网络能够堆叠更多层,在图像分类、目标检测等任务中取得优异性能。例如,ResNet-50 在ImageNet 图像分类任务中准确率超过 90%。
3.1.2 循环神经网络(RNN)及其变体
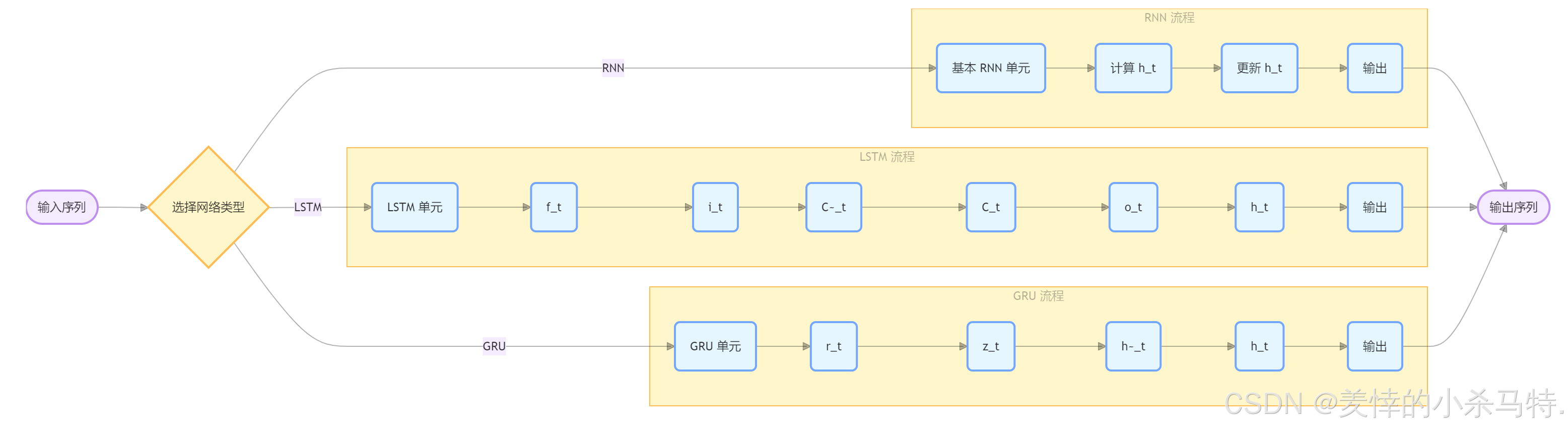
RNN 通过隐藏层的自连接处理序列数据,但存在梯度消失 / 爆炸问题。LSTM 和 GRU 通过门控机制改进:
- LSTM:通过遗忘门、输入门、输出门控制信息流动。遗忘门决定上一时刻的哪些信息需要保留;输入门控制当前输入的哪些信息将被存储;输出门决定当前细胞状态的哪些信息将被输出。这种机制使 LSTM 能够有效处理长序列数据,如时间序列预测和自然语言处理。
- GRU:简化 LSTM 结构,将遗忘门和输入门合并为更新门,同时引入重置门,计算效率更高,在部分任务中性能与 LSTM 相当。
3.1.3 注意力机制与 Transformer
Transformer 基于注意力机制构建,解决长序列依赖问题,在自然语言处理领域取得突破性进展:
- 多头注意力:通过多个并行的注意力头从不同角度捕捉序列特征,每个头关注输入序列的不同部分,最后将结果拼接,增强模型对复杂关系的建模能力。
- 自注意力机制:计算序列内部元素关联度,使模型能够同时关注序列的不同位置,避免 RNN 顺序计算的局限性,尤其适用于长文本处理和机器翻译任务。例如,在机器翻译中,自注意力机制可直接建立源语言和目标语言之间的语义对应关系,提升翻译质量。
3.2 图像识别与处理应用
3.2.1 工业视觉检测
- 缺陷检测:
采用 Faster R-CNN 检测电路板焊接缺陷,准确率达 98%。Faster R-CNN 通过区域建议网络(RPN)生成候选区域,结合卷积神经网络进行特征提取和分类,能够快速定位并识别微小缺陷。 - 尺寸测量:
基于 YOLOv5 实现机械零件快速尺寸检测,检测速度提升 40%。YOLOv5 是一种单阶段目标检测算法,具有轻量化、高速度的特点,在工业生产线上可实时测量零件尺寸,确保产品质量。
3.2.2 智能监控系统
- 行为识别:利用
3D CNN 识别监控视频中的异常行为(如跌倒、徘徊)。3D CNN 在传统 2D CNN 基础上增加时间维度,能够捕捉视频中的时空特征,有效识别复杂行为模式。 - 目标跟踪:
DeepSORT 算法实现多目标实时跟踪。该算法结合了深度学习特征提取和传统的 SORT 跟踪算法,通过外观特征和运动信息对目标进行关联,在拥挤场景中也能准确跟踪多个目标。
3.3 自然语言处理应用
3.3.1 智能客服系统
- 意图识别:BERT 模型将用户问题分类准确率提升至 92%。BERT 基于 Transformer 架构,通过双向预训练学习文本的上下文语义信息,能够准确理解用户提问意图,如查询订单状态、投诉建议等。
- 对话生成:GPT 系列模型实现多轮对话交互。GPT 通过自回归方式生成文本,在大规模语料上训练后,可根据用户输入生成连贯、合理的回复,广泛应用于智能客服、聊天机器人等场景。
3.3.2 自动化文档处理
- 合同审查:通过 NLP 提取合同关键信息,效率提升 80%。利用命名实体识别(NER)、关系抽取等技术,自动提取合同中的当事人、金额、日期、违约责任等关键条款,减少人工审查时间。
- 文档摘要:基于 Transformer 生成新闻稿件摘要。通过编码器 - 解码器结构,模型能够理解文档核心内容,并生成简洁、准确的摘要,常用于新闻媒体、信息检索等领域。
3.4 自动化决策系统
3.4.1 金融风控
- 信用评估:LSTM 分析用户交易流水,预测违约概率。LSTM 能够捕捉时间序列中的长期依赖关系,通过学习用户历史交易数据的模式,评估其信用风险,为信贷决策提供依据。
- 市场预测:结合 Transformer 与强化学习预测股票价格走势。Transformer 处理市场新闻、财报等文本信息,强化学习根据市场反馈优化投资策略,实现对股票价格的动态预测和投资决策。
3.4.2 智能交通
- 交通流量预测:
时空图卷积网络(STGCN)预测路段车流量。STGCN 将交通网络建模为图结构,通过卷积操作同时学习空间上的路段关联和时间上的流量变化规律,预测准确率较传统方法提升 25%。 - 自动驾驶决策:端到端神经网络直接根据传感器数据输出驾驶指令。例如,Waymo 的自动驾驶系统通过训练大量实际驾驶场景数据,使神经网络能够基于摄像头、雷达等传感器输入,直接生成转向、加速、刹车等控制信号,实现安全驾驶。
四、算法与深度学习的融合实践
4.1 混合算法架构设计
- GA-CNN:
利用遗传算法优化 CNN 的网络结构和超参数。遗传算法通过进化搜索不同的卷积层数量、卷积核大小、池化方式等,自动找到最优的网络架构。例如,在图像分类任务中,GA-CNN 可将模型准确率提升 5%-8%。 - PSO-LSTM:
通过粒子群算法调整 LSTM 的学习率和权重初始化。PSO 能够快速搜索到最优的参数组合,避免 LSTM 陷入局部最优,在时间序列预测任务中显著提高预测精度。
4.2 典型应用案例
4.2.1 智能仓储系统
- 布局优化:遗传算法规划货架布局,提升仓储空间利用率。根据货物的出入库频率、尺寸等因素,遗传算法可生成最优的货架排列方案,某电商仓库应用该方法后,
空间利用率从 65% 提升至 82%。 - 库存管理:LSTM 预测商品需求,自动触发补货流程。通过分析历史销售数据,LSTM 能够预测未来商品销量,当库存低于阈值时,系统自动生成采购订单,降低缺货风险。
4.2.2 工业机器人控制
- 路径规划:蚁群算法规划机器人运动轨迹。在多机器人协作场景中,蚁群算法可协调多个机器人的路径,避免碰撞并优化作业顺序,提高生产效率。
- 姿态调整:CNN 识别工件位置,反馈至运动控制系统。机器人通过摄像头采集图像,CNN 实时识别工件姿态,调整末端执行器位置,实现高精度抓取和装配。
五、技术挑战与瓶颈
5.1 数据质量与可用性
- 数据标注难题:医疗影像标注需专业知识,人力成本高。例如,标注一张肺部 CT 影像中的病变区域,需要放射科医生花费 10-15 分钟,且不同医生标注结果可能存在差异,影响模型训练效果。
- 数据不平衡:故障数据样本稀缺,导致模型泛化能力不足。在工业设备故障诊断中,正常运行数据量大,而故障数据占比不足 1%,容易造成模型对故障模式的识别能力弱。
5.2 算法效率与实时性
- 深度学习计算资源需求:
训练 ResNet50 需消耗数百 GPU 小时。复杂的深度学习模型参数量庞大,训练过程需要强大的算力支持,限制了其在资源受限场景中的应用。 - 边缘设备部署限制:嵌入式系统算力不足,难以运行复杂模型。例如,智能摄像头等边缘设备通常配备低功耗芯片,无法满足高精度深度学习模型的实时推理需求。
5.3 模型安全与可解释性
- 对抗攻击风险:恶意输入可使图像识别模型误判。攻击者通过对图像添加微小扰动,可导致模型将熊猫误识别为长臂猿,威胁自动驾驶、安防监控等系统安全。
- 黑盒特性:医疗诊断场景中,模型决策过程难以解释。例如,深度学习模型诊断癌症时,无法清晰说明判断依据,导致医生和患者对模型结果缺乏信任。
六、未来走向
6.1 边缘智能与轻量化模型
- 模型压缩技术:
通过剪枝、量化将模型体积缩小 80%。剪枝去除模型中不重要的连接和参数,量化将高精度参数转换为低精度表示,在几乎不损失精度的情况下大幅降低模型存储和计算需求。 - 边缘计算框架:TensorFlow Lite 支持移动端高效推理。边缘计算框架允许深度学习模型在手机、智能家居设备等终端直接运行,减少数据传输延迟,保护用户隐私。
6.2 强化学习与自动化决策
- 动态环境适应:在智能电网中实时优化电力调度。强化学习智能体
通过与电网环境交互,学习不同负荷下的最优调度策略,平衡发电与用电需求,提升能源利用效率。 - 多智能体协同:
无人机集群通过强化学习实现协同作业。多个无人机组成智能体群体,通过通信和协作完成搜索、救援、巡检等复杂任务,如在森林火灾中协同定位火源并规划灭火路径。
6.3 多模态大模型
- 视觉 - 语言模型:
CLIP 实现图文跨模态检索。CLIP 通过对比学习训练图像和文本的联合表示,能够理解图像和文本之间的语义关联,支持 "以图搜文" 和 "以文搜图" 功能。 - 具身智能:
结合机器人感知与语言模型,实现复杂任务执行。例如,大语言模型与机器人传感器数据结合,使机器人能够理解自然语言指令,并在现实环境中完成 "找到桌子上的红色水杯并递给我" 等复杂操作。
七、总结
算法与深度学习的深度融合正在重塑自动化。过去,自动化靠固定程序完成简单任务,现在,算法和深度学习让机器像人一样 "思考" 和 "学习"。