📘
一、最高级观察
在上篇我们分析了 power-domain 层:
- 由 SoC 内部或外部 PMIC 控制集成的一些组件上下电
- 驱动系统中通过 pm_runtime / GENPD 来管理 power-domain
而实际上,要真正运行一个硬件,必须有供电,这就需要 regulator 来实际执行。
Power Domain 是策略,Regulator 是实际进行物理操作。
总结:
高级 power management = 策略层的 power-domain + 实际操作层的 regulator
二、全图统观:电源管理整体结构
设备树 (DTS):
- power-domains: 指向 SoC 内部电源控制器(PGC)
- regulators: 给定硬件模块分配物理电压
↓
驱动创建 platform_device
↓
GENPD 架构
└→ 管理设备与其对应的 power-domain
↓
Runtime PM 组织 suspend/resume
└→ suspend :退出 regulator_disable()
└→ resume:启动 regulator_enable()
↓
通过 PMIC 硬件(通常通过 I2C 控制)三、Regulator 基本概念
| 项目 | 说明 |
|---|---|
| Regulator | 维护物理电源,调节电压,开关供电 |
| 实现层 | PMIC 硬件(Buck / LDO 模块) |
| 管理框架 | Linux Regulator 框架,通用接口(如 regulator_enable) |
| 电压分配 | 按需给不同模块分配不同电压 |
四、实际链路:LCDIF1 为例(从 DTS 到驱动)
【步骤 1】 设备树:LCDIF1
dts
lcdif1: lcd-controller@32e80000 {
compatible = "fsl,imx8mp-lcdif1";
reg = <0x32e80000 0x10000>;
clocks = <&clk IMX8MP_CLK_MEDIA_DISP1_PIX_ROOT>,
<&clk IMX8MP_CLK_MEDIA_AXI_ROOT>;
clock-names = "pix", "disp-axi";
power-domains = <&media_blk_ctrl IMX8MP_MEDIABLK_PD_LCDIF_1>;
};注意:这里尝试了"功能分域",同时含有电源配置。
【步骤 2】 驱动部分:驱动识别设备
c
static const struct of_device_id imx_lcdifv3_dt_ids[] = {
{ .compatible = "fsl,imx8mp-lcdif1", .data = &imx8mp_lcdif1_pdata },
{ }
};【步骤 3】 probe:启用 runtime pm
c
pm_runtime_enable(dev);这一步就完成了 power-domain + regulator 的装配!
【步骤 4】 runtime resume:执行 regulator_enable()
在 GENPD 和 PM Runtime 配合下,在 resume 时,系统自动执行:
c
__pm_runtime_resume(dev)
-> pm_genpd_poweron()
-> genpd_start_dev()
-> regulator_bulk_enable()所以:
- 驱动中 不用自己写 regulator_enable),是帮你自动做了!
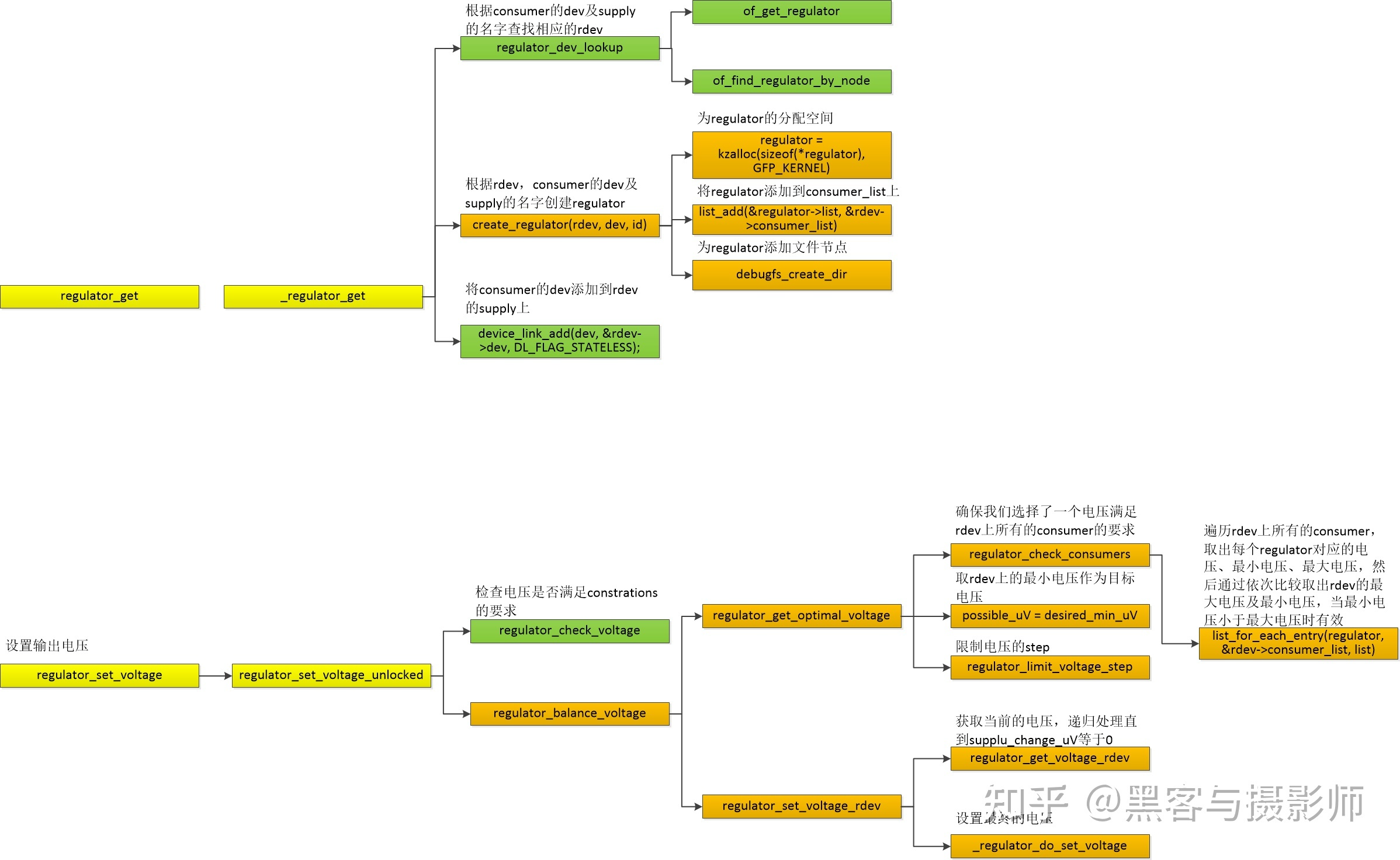
五、Regulator 基础 API 解说
| API | 功能 |
|---|---|
| regulator_get(dev, id) | 拉取指定 regulator(通过 dev+id) |
| regulator_enable(regulator) | 启动供电 |
| regulator_disable(regulator) | 关闭供电 |
| regulator_set_voltage(regulator, min_uV, max_uV) | 设置电压范围 |
Regulator 框架与其实硬件(PMIC读写)是分层的,实现协调好了!
六、实际链路:一步步执行
这里给出一条真实的高清流程:
启动设备 ->
pm_runtime_get_sync(dev)
-> pm_genpd_poweron()
-> 启动所有相关 regulator
-> regulator_enable()
-> 连通 I2C 向 PMIC 发送记录
-> 改变 PMIC 实际读写字节,打开实际电压路完美连通,driver 自己不用写任何频繁的 I2C 操作!
七、实战分析:相关驱动分析
在 NXP i.MX8MP 中,一般是通过 pca9450 这个 PMIC,其驱动以 regulator框架注册:
c
static const struct regulator_desc pca9450_descs[] = {
{
.name = "pca9450-buck1",
.id = PCA9450_BUCK1,
.of_match = of_match_ptr("buck1"),
.regulators_node = of_match_ptr("regulators"),
...
},
...
}对应 DTS 配置:
dts
regulators {
buck1_reg: regulator@0 {
compatible = "fsl,pca9450-buck";
regulator-name = "BUCK1";
regulator-min-microvolt = <850000>;
regulator-max-microvolt = <950000>;
};
};这样:
- 电压控制相应解析到 pca9450 driver 里,就是一个 regulator设备!
而外部设备如 LCDIF1,相应 power-domain 后,在 resume/suspend 自动调用 regulator_enable/disable,实现完整的开关电操作。
八、实际代码示例:开启 LCDIF1
下面是高清正确实际流程:
c
static int lcdif1_runtime_resume(struct device *dev)
{
/* 需要接管 power domain */
pm_runtime_get_sync(dev);
/* 接下来就可以启用 pixel clock */
clk_prepare_enable(lcdifv3->clk_pix);
return 0;
}-> 开启 power-domain,GENPD 内部自动 regulator_enable,硬件编组完成上电。
九、总结:一次全面理解
| 分级 | 内容 |
|---|---|
| 最上层:设备 | LCDIF1 需要供电 |
| power-domain | 控制 LCDIF1 模块居位的集成基地 |
| regulator | 实际控制 PMIC 读写,打开或关闭电压 |
| pm_runtime | 云规划系统,根据设备工作流程自动解决 |
| GENPD框架 | 组织 power-domain 相关调用 |
十、全图:LCDIF1 高清电源管理流程图
设备树 (DTS)
└→ power-domains
└→ media_blk_ctrl
└→ 对应开关 regulator
Runtime Resume
└→ pm_genpd_poweron
└→ regulator_enable
└→ 通过 PMIC 硬件进行实际电压控制十一、总结:评价
-
Power-domain 是策略级的逻辑划分,它定义了模块应该怎样统一上电/下电,但自己不直接操作电源电压。
-
Regulator 是实际的电源控制执行者,负责具体的物理电源开关(比如通过 PMIC 控制 BUCK、LDO 等输出)。
-
GENPD框架 是连接 power-domain 与 regulator 的桥梁,它根据设备 runtime 状态(比如 suspend、resume),智能调用 regulator_enable() 或 regulator_disable(),完成实际电源开关。
-
PM Runtime 则是动态控制设备上下电的管理系统,跟 GENPD 紧密配合,让设备根据使用情况实时节能。
最终结果是:
-
驱动开发者只需要在 probe 里
pm_runtime_enable(),在需要时pm_runtime_get/put(),其他全部交给框架自动完成。 -
高级别地,把设备电源管理从"底层操作"彻底解放出来,简化开发,提高稳定性和节能性。
十二、实战建议:BSP 工程师要点
对于 i.MX8MP 这样复杂平台,作为 BSP 工程师,需要特别关注以下要点:
| 要点 | 说明 |
|---|---|
| 设备树检查 | 确保设备有正确的 power-domains 和 regulator 配置 |
| 硬件理解 | 了解每个模块实际需要的电压、时序依赖关系 |
| 驱动规范 | 驱动中必须启用 pm_runtime,规范 suspend/resume |
| 关注调试 | 分析电源问题时,学会查 GENPD 日志和 Regulator 状态 |
| 细致调优 | 有些设备需要定制 resume/suspend 特殊操作,必须严格遵循 |
掌握这一整套体系,你就真正进入了高阶 BSP 工程师的领域!
十三、典型错误与教训
在实际项目中,常见以下问题,必须引以为戒:
- 忘记配置 power-domains,导致设备无法正确 suspend/resume,最终引发系统功耗异常。
- 手动 enable/disable regulator,破坏 GENPD 和 Runtime PM 的管理,容易引起竞态和死锁。
- 忘记 pm_runtime_enable(),导致设备 runtime pm 无法生效,系统长时间维持高功耗。
- 不理解 regulator 与 PMIC 关系,盲目调试导致误操作底层 PMIC,损坏板卡或者引发死机。
教训:电源管理,一定要遵循规范!
十四、实践演练:LCDIF1 电源链调试示例
假设 LCDIF1 无法正常亮屏,可以按以下步骤排查:
- 检查设备树 power-domains 配置正确。
- 检查 LCDIF1 所属 media_blk_ctrl 中,是否正确配置 regulator 绑定。
- 启动内核,打开内核日志(dmesg),查看 pm_genpd 是否成功 attach 到设备。
- 在驱动中,添加调试日志,确认 runtime resume/suspend 是否被正确触发。
- 检查 PMIC 中对应供电 rail 电压是否正常(通过 I2C Dump 或外部示波器监测)。
- 最后检查 pixel clock 等是否已经准备就绪。
通过这种系统性的分析方法,即使是复杂的 i.MX8MP 平台,也能精准定位并解决问题!
十五、核心精炼总结
最终,概括一句话:
i.MX8MP 的 LCDIFv3 驱动电源管理,采用了 power-domain + regulator 双层机制,完全基于 GENPD 和 Runtime PM 框架,由平台框架自动管理电源供给,驱动开发者只需要规范编写 runtime suspend/resume,无需关心底层细节。
这是现代 SoC 电源管理发展的必然趋势,也是高级 BSP 工程师必须掌握的核心体系。
掌握了这一套,你不仅能看懂驱动,还能自己设计完整的电源管理架构!
📌 Day 23 总结
| 内容 | 核心 |
|---|---|
| Power Domain | 逻辑划分,定义模块电源控制策略 |
| Regulator | 物理执行,操作 PMIC 控制电源 |
| GENPD 框架 | 连接 power-domain 与 regulator |
| Runtime PM | 动态管理设备电源,实时节能 |
| 驱动职责 | 启用 pm_runtime,规范 suspend/resume |
| BSP能力 | 硬件理解 + 框架掌握 + 规范实现 + 调试分析 |
✅ Day 23(下篇)正式完结!
下一步,Day 24 将进入:
📘 驱动开发硬核特训 · Day 24(上篇):全面解析 Regulator 框架与 PMIC 驱动开发