目录
[input输入检测 -- 向内检测](#input输入检测 -- 向内检测)
[output控制输出 -- 向外输出](#output控制输出 -- 向外输出)
[软件编程驱动 LED 灯](#软件编程驱动 LED 灯)
[软件编程驱动 KEY 按键](#软件编程驱动 KEY 按键)
STM32F103的GPIO口
根据 STM32F103ZET6 的命名规范,总共 144 个引脚
PA0--PA15
PB0--PB15
PC0--PC15
PD0--PD15
PE0--PE15
PF0--PF15
PG0--PG15 16*7=112
以上称为 GPIO(通用的输入输出接口)
11 个 VDD -- 数字电源的正
11 个 VSS -- 数字电源的负 134
1 个 VDDA -- 模拟电源的正
1 个 VSSA -- 模拟电源的负
1 个 VREF+ -- 参考电压的正
1 个 VREF- 参考电压的负
1 个 NRST -- 复位引脚 139
2 个 OSC_IN OSC_OUT 141 --高速晶振
1 个 VBAT 142 -- 接电池
1 个 NC -- 未使用
1 个 BOOT0 -- 下载引脚
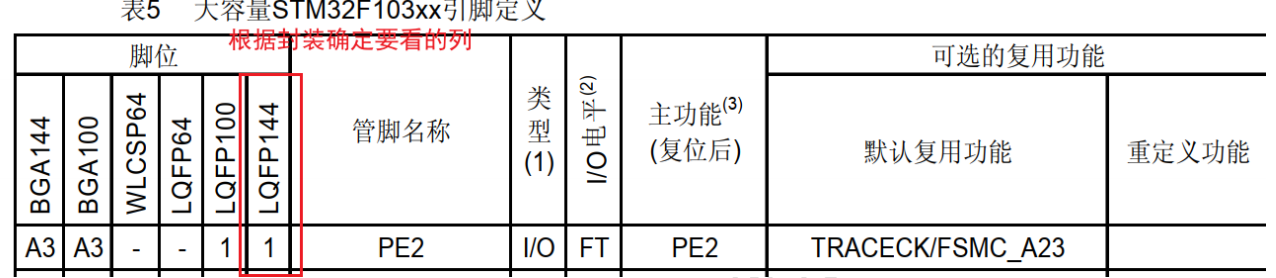
PE2 P 指端口(Port),E 指 E 端口,1 个端口一般有 16 个 GPIO 口 0--15
PE2 指 E 端口的第二个引脚
PG11 指 G 端口的第十一引脚
PA0 指 A 端口的第零引脚
上面信息从:数据手册中文:图 5,芯片的外观中获取
GPIO口的作用
芯片内部和外部通信的媒介。
如何确定配置输入还是输出?
⚫ 向内输入检测:检测开关是否按下,检测屏幕是否按下。
⚫ 向外输出控制:控制 LED,蜂鸣器,控制继电器,控制显示屏
⚫ 后期程序配置中,是否需要配置 GPIO,取决于单片机是否需要借助 GPIO 口和外界连接
GPIO口的工作模式
总共八种
四种输入
模拟输入
上拉输入
下拉输入
浮空输入
四种输出
通用推挽输出
通用开漏输出
复用推挽输出
复用开漏输出
input输入检测 -- 向内检测
极端(数字)输入:3.3V 或者 0V,正好对应数字量的逻辑 1 和逻辑 0
模拟输入: 0v~3.3V 之间的中间值,一般结合 ADC 使用
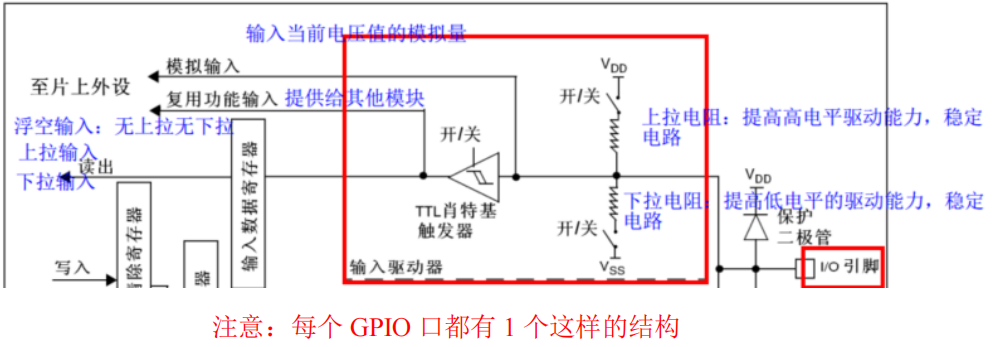
TTL 肖特基触发器:把高低电平电压值转换为逻辑值(0 和 1);
如何确定选择哪种输入模式:
⚫ 外部电路的电压是 0---3.3 的任意电压,选择模拟输入
⚫ 外部电路有靠谱高和低两种状态,选择浮空输入
⚫ 外部电路只有靠谱的高,选择下拉输入
⚫ 外部电路只有靠谱的低,选择上拉输入
output控制输出 -- 向外输出
输出模拟量:0--3.3V 之间的电压,DAC 功能使用
输出数字量:只有逻辑 0(对应 0V),逻辑 1(对应 3.3V)
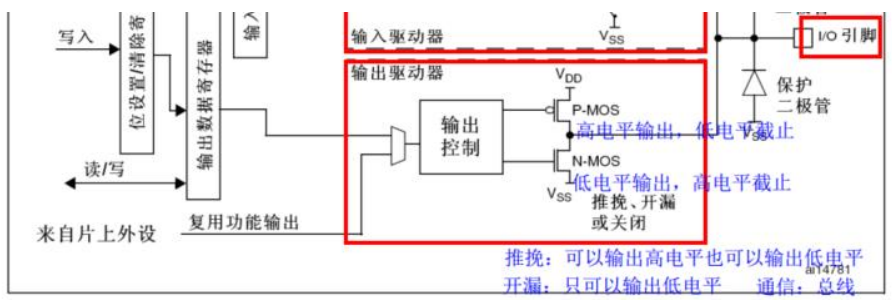
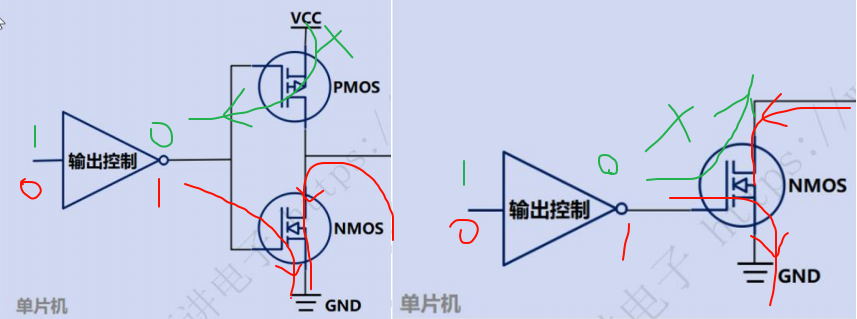
推挽输出:既可以输出高电平,也可以输出低电平,PMOS 和 NMOS 都可以导通,直接把逻辑值输出成高低电平 。
开漏输出:只能输出低电平,输出为 1 时是高阻态(未知状态,电路上电压由电路来决定);经常应用在总线,需要增加上拉电阻配合使用;具有读取(线与)的功能。
DHT11 的采集电路 -- 用开漏模式
复用:来至于片上外设,USART,硬件 SPI,硬件 IIC,定时器 PWM
通用:普通的 GPIO 口,控制 LED、蜂鸣器、继电器
如何确定输出选择哪种模式:
⚫ 既需要输出高电平,也需要输出低电平,选择推挽模式
⚫ 只需要输出低电平,选择开漏模式
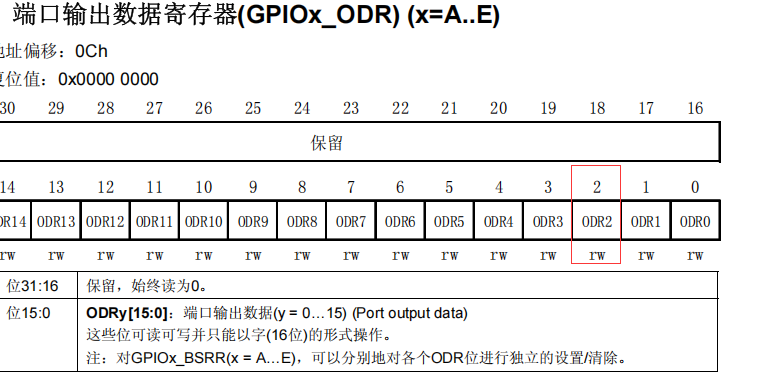
⚫ 普通 GPIO 口的输出,例如控制 LED,蜂鸣器,继电器等通过操作 ODR 寄存器实现的,配置通用输出
⚫ 外设控制的输出,例如 USART,硬件 SPI,硬件 IIC,定时器 PWM,选择复用功能
寄存器
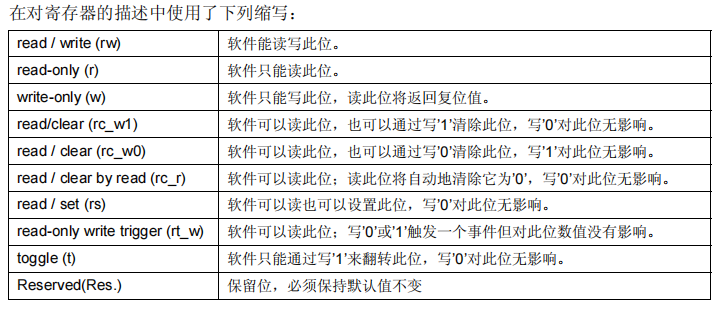
寄存器存放的是:工作模式,输入或者输出的电平状态。
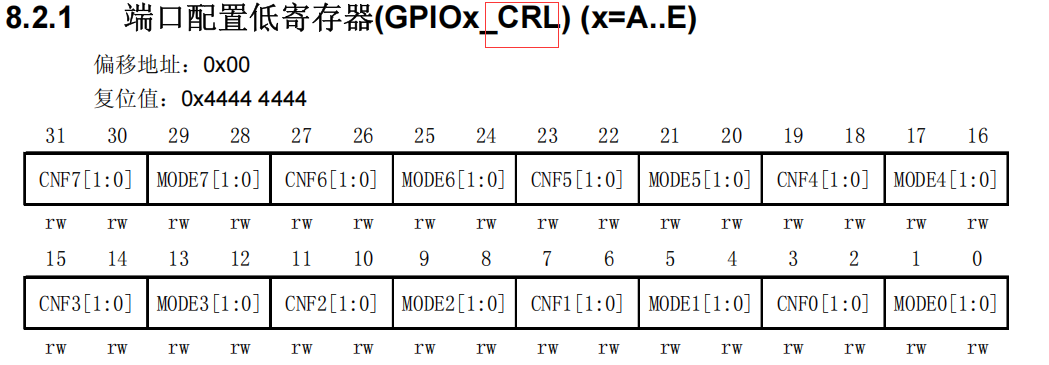
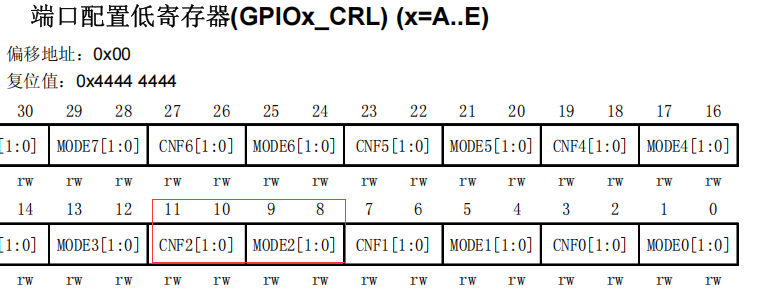
(GPIOx_CRL) (x=A..G) :每个端口都有 1 个这样的寄存器(STM32F103ZET6 有 7 个端口)
偏移地址:相对于这个外设基地址的偏移
复位值:单片机复位之后,寄存器中存放的值
寄存器地址的确定
GPIOA_CRL 寄存器地址
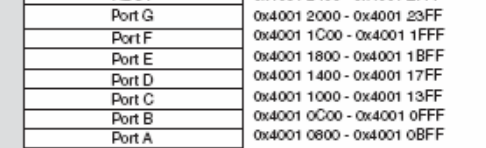
- 确定属于哪个端口,找到该端口的外设基地址 -- 从数据手册 存储器映像找

- 找到 CRL 寄存器相对于外设基地址的偏移值 -- 从参考手册对应寄存器介绍
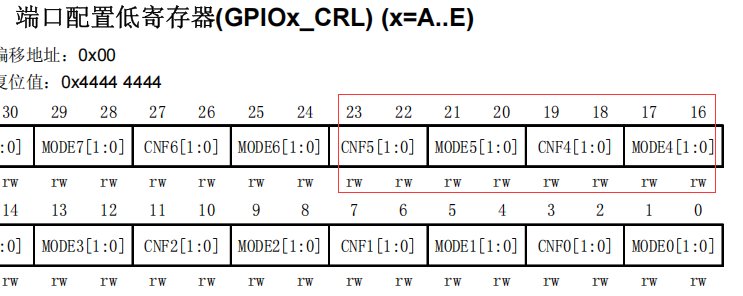
偏移地址:0x00

- 计算该寄存器的地址
寄存器的地址=外设基地址+偏移地址=0x40010800+0x00=0x40010800
配置GPIO口的工作模式
(1) 确认端口
(2) 确认哪个 GPIO 口,0--7 在 CRL 寄存器中,8--15 在 CRH 寄存器中
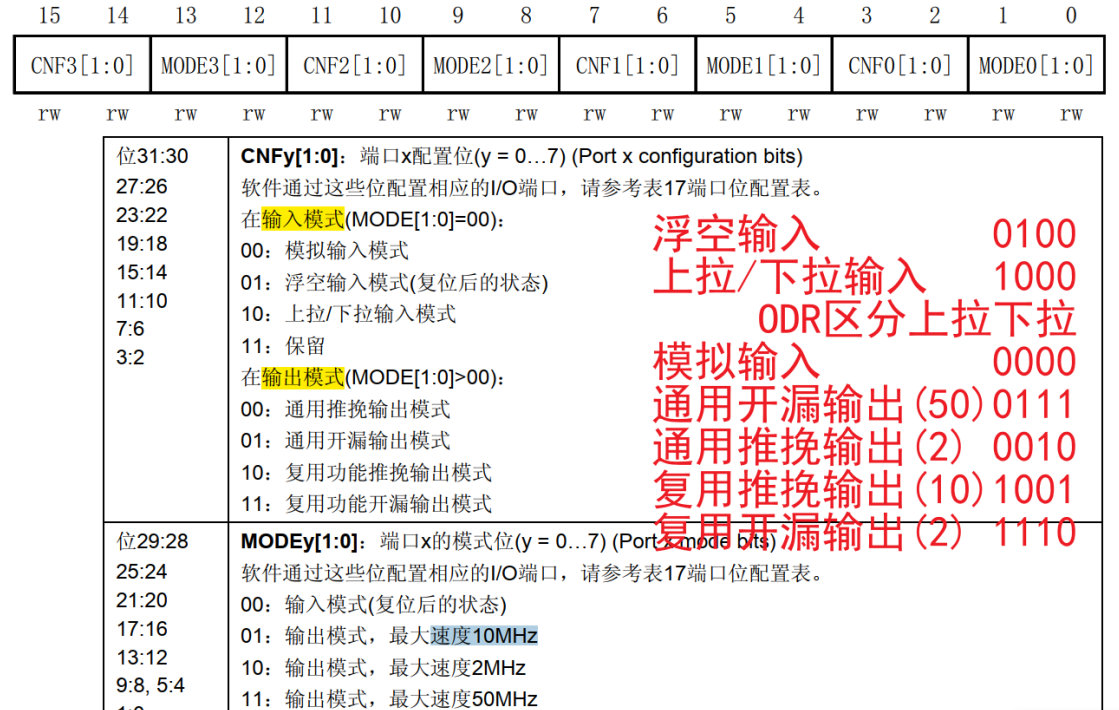
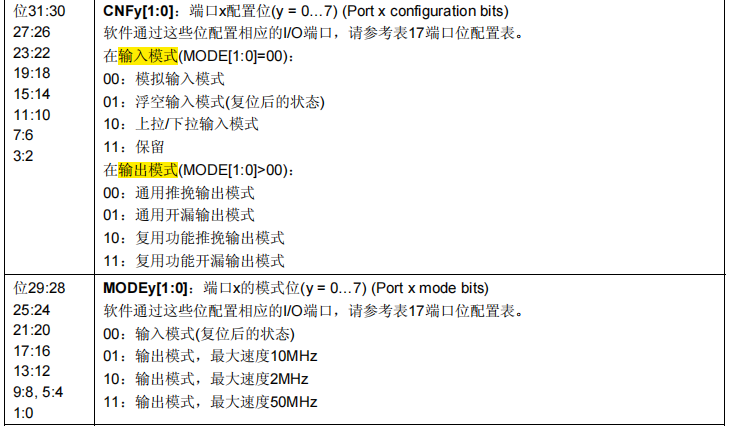
(3) 先配置 MODE 的两位,确定好输入和输出模式
(4) 在配置 CNF 位,确定具体的模式
时钟的开启和关闭
各个功能模块有独立的时钟开关,设备厂商考虑到功耗的问题,如果不使用该模块,时钟默认是关闭的。开启时钟之后,对应模块才可以正常工作
使用功能模块 一定要开启时钟
RCC_APB2ENR 寄存器地址
(1) 找 RCC 的外设基地址

(2) 找到寄存器相对于外设基地址的偏移

(3) 计算寄存器地址
RCC_APB2ENR=0x40021000+0x18=0x40021018
软件编程驱动 LED 灯
硬件

软件
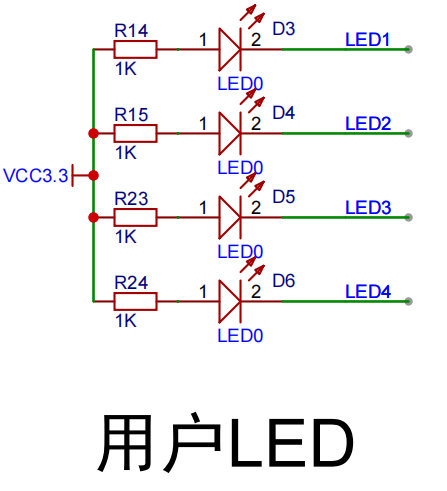
1.看硬件图,LED分别接在PE2-PE5
2.开启PE端口时钟

3.设置工作模式,以PE2为例
结合硬件电路, 首先选择通用还是复用,复用功能需要结合外设(UART_TX 等)使用,我们选择通用输出,开漏和推挽选择,推挽一定可以,为了有稳定的状态,所以选择推挽,所以最终选择通用推挽输出。
4.分别控制输出高低电平。假如以 PE2 为例,操作 GPIOE_ODR 的位 2,分别设置为 0 和 1
软件编程驱动 KEY 按键
硬件
软件
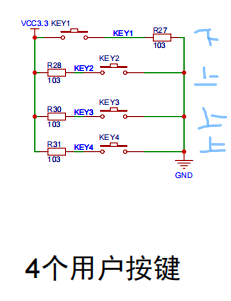
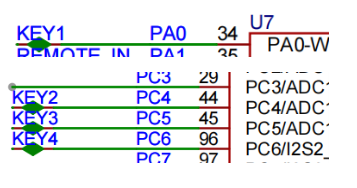
1.结合硬件原理图,确定 KEY 分别接在 PA0 PC4 PC5 PC6
2.开启对应的端口时钟,开启 C 端口和 A 端口时钟

RCC_APB2ENR 的位 2 置 1,开启端口 A 的时钟
RCC_APB2ENR 的位 4 置 1,开启端口 C 的时钟
3.设置工作模式,假如以 PC4 PC5 为例,操作 GPIOE_CRL 寄存器的位 23:16 结合硬件电路, 按键按下和未按下有稳定的高电平和低电平,所以选择浮空输入 GPIOC_CRL 寄存器的位 23:16 写入 0100 0100
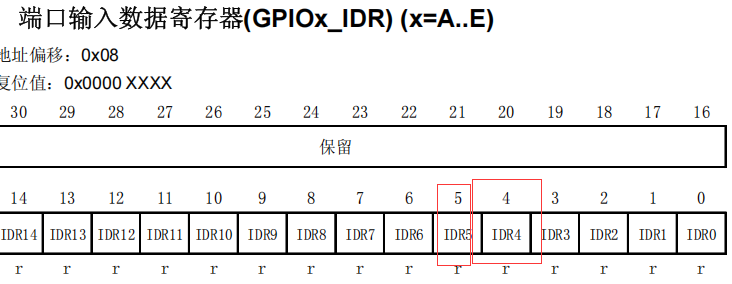
4.分别检测(读取)PC4,PC5 的引脚电平,来确定按键是否按下GPIOC_IDR 的位 4 或者位 5 判断按键是否按下
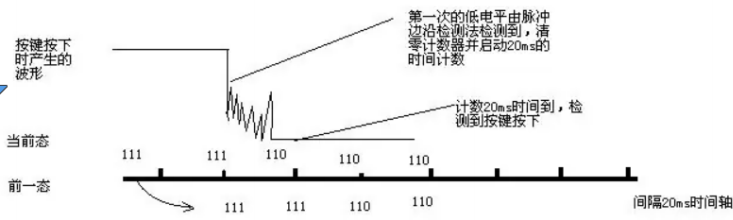
按键消抖
代码
led.c
cpp
#include "led.h"
#include "main.h"
void LED_Config(void)
{
#if (USB_STD_LIB==0)
//1.开启GPIOE的时钟 结合硬件:LED4接在PE5上 6.3.7RCC_APB2ENR
/*RCC的外设地址 0x40021000
RCC_APB2ENR寄存器相对于基地址偏移0x18
RCC_APB2ENR寄存器地址:0x40021000+0x18 + 0x18= 0x40021018
*/
//*(uint32_t *)(0x40021018) = (*(uint32_t *)(0x40021018)) | (0x01<<6);
//RCC->APB2ENR = RCC->APB2ENR | (0x01<<6);
RCC->APB2ENR |= (0x01<<6);
//2.设置gpio模式,设置通用推挽输出
//LED4初始化
GPIOE->CRL &= ~(0xFFFF << 8);//先清0
GPIOE->CRL |= (0x1111 << 8);//在置1
/* GPIOE->CRL &= ~(0xF << 20);//先清0
GPIOE->CRL |= (0x01 << 20);//在置1
//LED3初始化
GPIOE->CRL &= ~(0xF << 16);//先清0
GPIOE->CRL |= (0x01 << 16);//在置1
//LED2初始化
GPIOE->CRL &= ~(0xF << 12);//先清0
GPIOE->CRL |= (0x01 << 12);//在置1
//LED1初始化
GPIOE->CRL &= ~(0xF << 8);//先清0
GPIOE->CRL |= (0x01 << 8);//在置1 */
#elif (USB_STD_LIB==1)
//1.开E端口时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE,ENABLE);
//2.定义结构体 xxx需要传递结构体地址
GPIO_InitTypeDef GPIO_InitStruct = {0};
//3.给结构体赋值
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 |GPIO_Pin_5;//代配置引脚
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//工作模式
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_10MHz;//引脚速率
//4.调用xxx_Init函数,将参数写入寄存器中
GPIO_Init(GPIOE, &GPIO_InitStruct);
#endif
}
void LED1_ON(void)//开灯,低电平亮
{
#if (USB_STD_LIB==0)
GPIOE->ODR &= ~(0x01 << 2);
#elif (USB_STD_LIB==1)
GPIO_ResetBits(GPIOE, GPIO_Pin_2);
#endif
}
void LED1_OFF(void)//关灯,高电平灭
{
#if (USB_STD_LIB==0)
GPIOE->ODR |= (0x01 << 2);
#elif (USB_STD_LIB==1)
GPIO_SetBits(GPIOE, GPIO_Pin_2);
#endif
}
void LED1_TOGGLE(void)//翻转 ^相同为0不同为1
{
#if (USB_STD_LIB==0)
GPIOE->ODR ^= (0x01 << 2);
#elif (USB_STD_LIB==1)
GPIO_WriteBit(GPIOE, GPIO_Pin_2, (BitAction)(1 - GPIO_ReadOutputDataBit(GPIOE, GPIO_Pin_2)));
#endif
}
void LED4_ON(void)//开灯,低电平亮
{
#if (USB_STD_LIB==0)
GPIOE->ODR &= ~(0x01 << 5);
#elif (USB_STD_LIB==1)
GPIO_ResetBits(GPIOE, GPIO_Pin_5);
#endif
}
void LED4_OFF(void)//关灯,高电平灭
{
#if (USB_STD_LIB==0)
GPIOE->ODR |= (0x01 << 5);
#elif (USB_STD_LIB==1)
GPIO_SetBits(GPIOE, GPIO_Pin_5);
#endif
}
void LED3_ON(void)//开灯,低电平亮
{
#if (USB_STD_LIB==0)
GPIOE->ODR &= ~(0x01 << 4);
#elif (USB_STD_LIB==1)
GPIO_ResetBits(GPIOE, GPIO_Pin_4);
#endif
}
void LED3_OFF(void)//关灯,高电平灭
{
#if (USB_STD_LIB==0)
GPIOE->ODR |= (0x01 << 4);
#elif (USB_STD_LIB==1)
GPIO_SetBits(GPIOE, GPIO_Pin_4);
#endif
}
void LED2_ON(void)//开灯,低电平亮
{
#if (USB_STD_LIB==0)
GPIOE->ODR &= ~(0x01 << 3);
#elif (USB_STD_LIB==1)
GPIO_ResetBits(GPIOE, GPIO_Pin_3);
#endif
}
void LED2_OFF(void)//关灯,高电平灭
{
#if (USB_STD_LIB==0)
GPIOE->ODR |= (0x01 << 3);
#elif (USB_STD_LIB==1)
GPIO_SetBits(GPIOE, GPIO_Pin_3);
#endif
}led.h
cpp
#ifndef __LED_H__
#define __LED_H__
#include "stm32f10x.h"
void LED_Config(void);
void LED4_ON(void);
void LED4_OFF(void);
void LED4_TOGGLE(void);
void LED3_ON(void);
void LED3_OFF(void);
void LED3_TOGGLE(void);
void LED2_ON(void);
void LED2_OFF(void);
void LED2_TOGGLE(void);
void LED1_ON(void);
void LED1_OFF(void);
void LED1_TOGGLE(void);
#endifkey.c
cpp
#include "key.h"
#include "delay.h"
#include "led.h"
#include "BUZZER.h"
#include "main.h"
#include "RGB.h"
#include "relay.h"
uint8_t RBG_state = 3;
void KEY_Config(void)
{
#if (USB_STD_LIB==0)
//RCC->APB2ENR |= (0x01<<2);
//RCC->APB2ENR |= (0x01<<4);
RCC->APB2ENR |= (0x05 << 2);
//KEY1
GPIOA->CRL &= ~(0xF << 0);//先清0
GPIOA->CRL |= (0x4 << 0);//在置1
//KEY2 KEY3 KEY4
GPIOC->CRL &= ~(0xFFF << 16);//先清0
GPIOC->CRL |= (0x444<< 16);//在置1
#elif (USB_STD_LIB==1)
//1.开A C端口时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOC,ENABLE);
//2.定义结构体 xxx需要传递结构体地址
GPIO_InitTypeDef GPIO_InitStruct = {0};
//3.
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;//工作模式,浮空输入
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;//待配置的引脚
//GPIO_InitStruct.GPIO_Speed = GPIO_Speed_10MHz; 输入可以不配置引脚速率
//4.调用xxx_Init函数,将参数写入寄存器中
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4 |GPIO_Pin_5 |GPIO_Pin_6;//代配置引脚
GPIO_Init(GPIOC, &GPIO_InitStruct);
#endif
}
//按键扫描函数
/*返回值
0无按键按下
1按键1按按下并松手
2按键2按按下并松手
3按键3按按下并松手
4按键4按按下并松手
*/
uint8_t KEY_SCAN(void)
{
#if (USB_STD_LIB==0)
uint8_t KEY_Sate;
if((GPIOA->IDR & (0x01 << 0)) != 0)//判断KEY1是否按下,按下为1高电平
{
Delay_ms(10);//消抖
if((GPIOA->IDR & (0x01 << 0)) != 0)
{
while((GPIOA->IDR & (0x01 << 0)) != 0)//确定松手
{}
KEY_Sate = 1;
}
}
if((GPIOC->IDR & (0x01 << 4)) == 0)//判断KEY2是否按下,按下为0低电平
{
Delay_ms(10);//消抖
if((GPIOC->IDR & (0x01 << 4)) == 0)
{
while((GPIOC->IDR & (0x01 << 4)) == 0)
{}
KEY_Sate = 2;
}
}
if((GPIOC->IDR & (0x01 << 5)) == 0)//判断KEY3是否按下,按下为0低电平
{
Delay_ms(10);//消抖
if((GPIOC->IDR & (0x01 << 5)) == 0)
{
while((GPIOC->IDR & (0x01 << 5)) == 0)
{}
KEY_Sate = 3;
}
}
if((GPIOC->IDR & (0x01 << 6)) == 0)//判断KEY4是否按下,按下为0低电平
{
Delay_ms(10);//消抖
if((GPIOC->IDR & (0x01 << 6)) == 0)
{
while((GPIOC->IDR & (0x01 << 6)) == 0)
{}
KEY_Sate = 4;
}
}
return KEY_Sate;
#elif (USB_STD_LIB==1)
uint8_t KEY_Sate = 0;
if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == Bit_SET)
{
Delay_ms(10);//消抖
if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == Bit_SET)
{
while(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == Bit_SET)//确定松手
{}
KEY_Sate = 1;
}
}
if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_4) == Bit_RESET)
{
Delay_ms(10);//消抖
if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_4) == Bit_RESET)
{
while(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_4) == Bit_RESET)//确定松手
{}
KEY_Sate = 2;
}
}
if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_5) == Bit_RESET)
{
Delay_ms(10);//消抖
if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_5) == Bit_RESET)
{
while(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_5) == Bit_RESET)//确定松手
{}
KEY_Sate = 3;
}
}
if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_6) == Bit_RESET)
{
Delay_ms(10);//消抖
if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_6) == Bit_RESET)
{
while(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_6) == Bit_RESET)//确定松手
{}
KEY_Sate = 4;
}
}
return KEY_Sate;
#endif
}
void KEY_Handle(void)
{
uint8_t KEY_Sate = 0;
KEY_Sate = KEY_SCAN();
switch(KEY_Sate)
{
case 0:
break;
case 1: LED1_ON(); LED2_ON(); LED3_ON(); LED4_ON();
break;
case 2: LED1_OFF(); LED2_OFF(); LED3_OFF(); LED4_OFF();
break;
case 3: Relay_ON();
break;
case 4: Relay_OFF();
//Update_RGB();
break;
}
}key.h
cpp
#ifndef __KEY_H__
#define __KEY_H__
#include "stm32f10x.h"
void KEY_Config(void);
uint8_t KEY_SCAN(void);
void KEY_Handle(void);
//void Tim2_Init();
//void TIM2_IRQHandler();
//void Update_RGB();
#endifmain.c
cpp
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
#include "RGB.h"
#include "relay.h"
#include "key.h"
#include "BUZZER.h"
#include "exti.h"
#include "main.h"
int main(void)
{
#if (USB_STD_LIB==0)
//开机调用一次配置的抢占和次级优先级必须符合该分组情况
//抢占0-3,次级0-3
NVIC_SetPriorityGrouping(5);
#elif (USB_STD_LIB==1)
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
#endif
LED_Config();
LED4_OFF();
LED3_OFF();
LED2_OFF();
LED1_OFF();
RGB_Config();
R_OFF();
G_OFF();
B_OFF();
Relay_Init();
Relay_OFF();
KEY_Config();
BUZZER_Config();
EXIT_Confing();
while(1)
{
R_ON();
Delay_ms(100);
R_OFF();
Delay_ms(100);
}
}