一、背景介绍
前面已经讲过泊松融合算法和它的fft快速版本实现了,想看下还有没有更快的版本,继续翻了下论文,找到了更快速的版本:Convolution Pyramids 。
找到它的matlab代码跑了下,效果还不错。学习记录,并用c++复现了下它梯度重建部分相关代码。
二、实现流程
1、基本原理
基本思路为:输入一张散度图像,在多尺度上用训练好的滤波器做卷积,恢复图像亮度信息到泊松重建的效果样子,因此整个流程分为训练和测试两个阶段。
训练阶段:使用散度图作为输入,使用该散度图正常泊松重建后结果作为gt训练,得到需要的滤波器核。
测试阶段:使用散度图和训练好的滤波器核,生成逼近泊松重建效果的结果图像。
2、测试部分
(1). 输入:
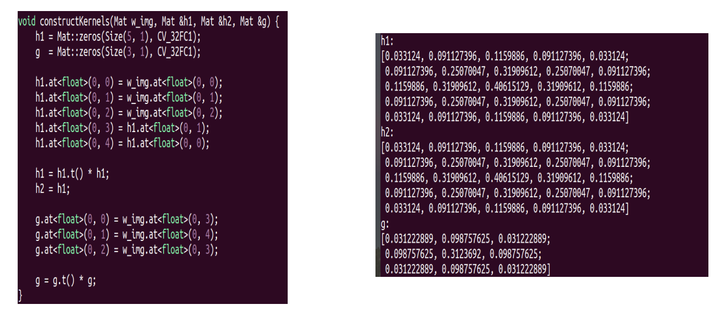
a、 训练的滤波器核。kernel=(-0.1820, -0.5007, -0.6373, 0.1767, 0.5589)
b、待重建图像散度div。
(2). 滤波器核拆解
(3). 重建流程
a、对div图像,使用h1进行滤波。
b、滤波后图像下采样(采样方式需要和训练使用采样方式完全一样),并保存残差。
c、迭代a,b步骤,得到残差金字塔。
d、金字塔最底层,使用g进行滤波, 并上采样。
e、倒数第二层残差使用h2进行滤波。
f、d 和e步骤结果叠加。
g、循环d,e,f步骤,金字塔重建得到结果图像。
3、训练部分
(1)、输入:1、一张输入图像。
(2)、设置训练kerenl参数为随机数。
(3) 、计算输入图像散度div。
(4)、迭代训练:
a、对滤波器核拆解。
b、对div图像进行重建。
e、计算重建图像和原始输入图像均值差,迭代更新滤波器。
三、效果对比
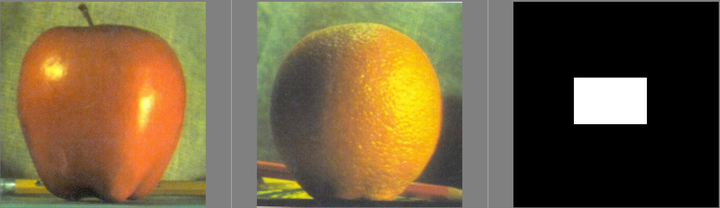
将如下图像进行图像散度融合,得到对应散度图信息。
根据散度信息和训练好的滤波器核进行图像重建,得到结果图(左边为本文算法结果,右边为fft版本泊松重建结果):
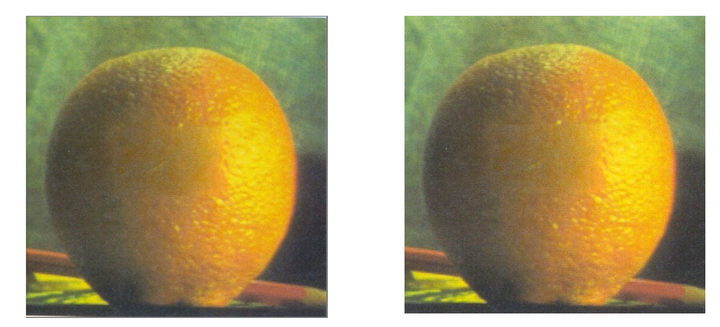
可以看到融合过度上和泊松版本基本持平,但是需要注意的是本文算法重建之后的图像整理亮度,对比原版泊松效果,会存在轻微差异。
运行时间上:原始版本,处理一张80x40x3的图,花了42秒左右。
fft加速版本,处理一张512x512x3的图,花了大概250ms左右。
convpyr_small版本,处理一张512x512x3的图,花了大概40ms左右。
四、代码地址
包含了论文完整matlab版本和我这边本地复现的c++散度重建部分:
https://github.com/yulinghan/ImageQualityEnhancement/tree/master/image_fusion/convpyr_small_poisson