C# 基于halcon的视觉工作流-章29-边缘提取-亚像素
本章目标:
一、1edges_sub_pix;
二、threshold_sub_pix;

本实例实现过程与章28基本相同,不同处在于提取的边缘是亚像素,精度较高,本文仅介绍不同之处,使用两种算子,情况如下。
一、1edges_sub_pix

二、threshold_sub_pix
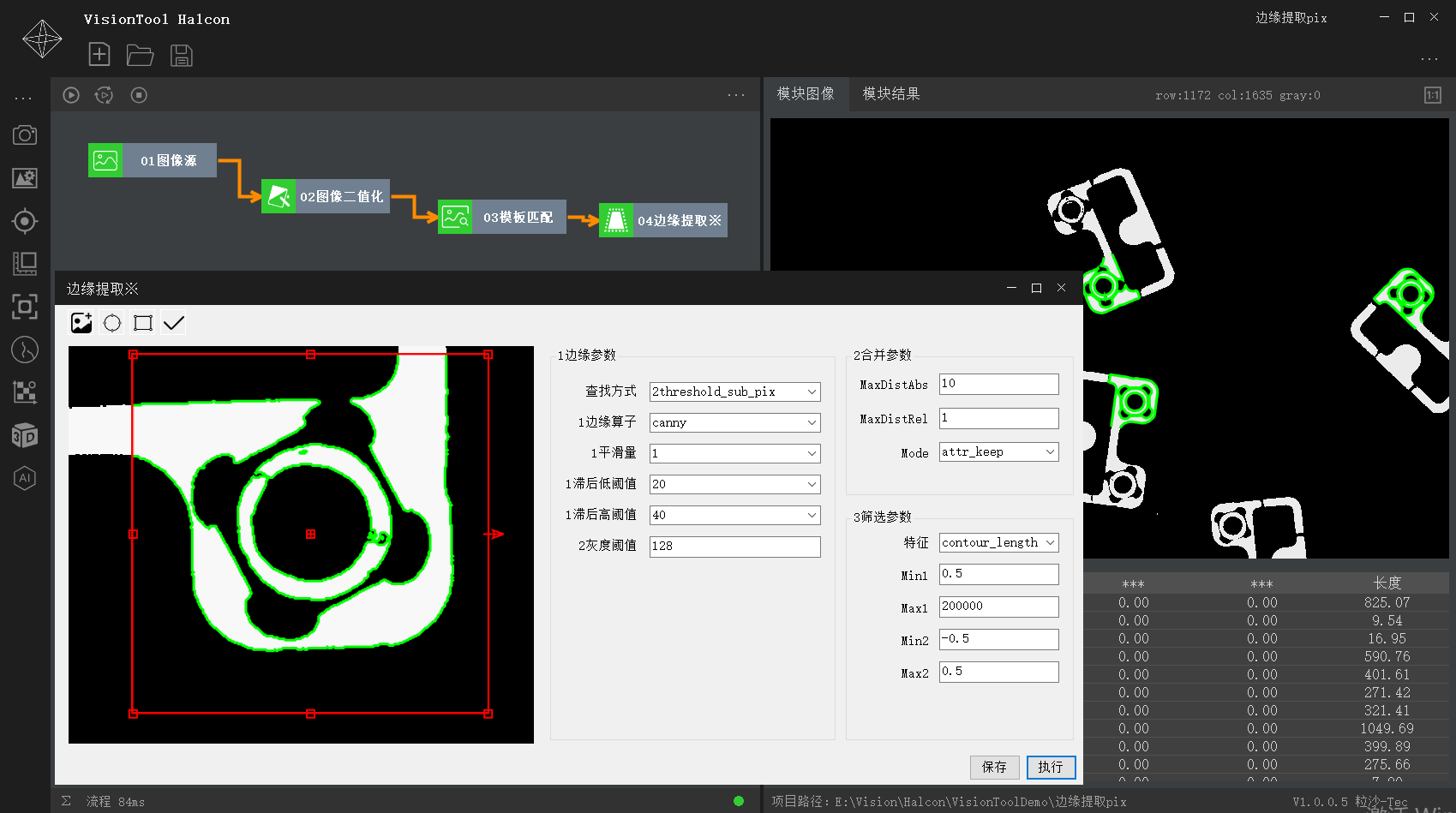
从边缘提取效果看,提取的边缘更逼近真实轮廓
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章,谢谢!
C# 基于halcon的视觉工作流-章29-边缘提取-亚像素
本章目标:
一、1edges_sub_pix;
二、threshold_sub_pix;
本实例实现过程与章28基本相同,不同处在于提取的边缘是亚像素,精度较高,本文仅介绍不同之处,使用两种算子,情况如下。
一、1edges_sub_pix
二、threshold_sub_pix
从边缘提取效果看,提取的边缘更逼近真实轮廓
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章,谢谢!