1技术背景
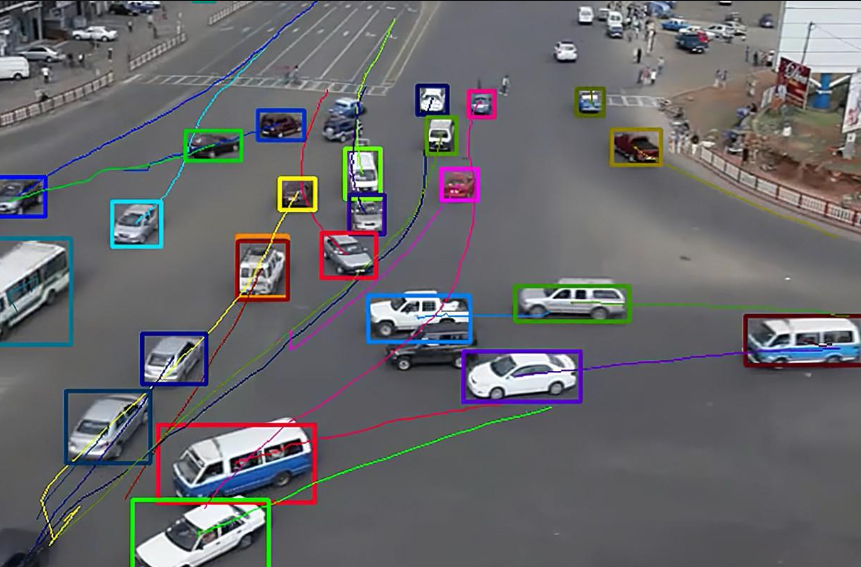
多目标运动跟踪(Multi-Object Tracking,MOT)是计算机视觉领域的重要研究方向。任务在于连续视频帧中同时检测并关联多个运动目标,输出每个目标的唯一身份ID及随时间变化的轨迹,挑战在于解决"检测-关联"的闭环问题。
实际应用中常发生于低特征环境下,如目标同质化、纹理缺失、光照不足、目标遮挡等,MOT方法面临检测失效痛点,且无法关联并重建轨迹。
为解决痛点,近年来视觉测量工程师们对传统MOT方法不断进行优化改进:
路径一基于深度学习特征增强MOT,核心引入深度神经网络自动提取目标的深度特征,并通过结合长短时记忆网络模型对目标的运动轨迹和外观特征进行联合建模实现多目标跟踪,优势在于自动处理大量数据并学习有用特征,可处理部分低特征场景下的多目标跟踪任务,但模型泛化能力有限,当训练样本与实际应用场景存在差异时,无法有效检测。
路径二生成式特征增强MOT, 核心引入生成式模型增强检测目标的视觉特征,如生成与实际目标相似但具有不同视角、光照条件的新图像,结合生成特征与原始特征,用于后续目标匹配与轨迹关联。该方法一定程度上解决低特征环境下多目标跟踪难题,但面临计算成本高、对生成模型质量敏感以及实时性困局。
2技术路径
千眼狼算法工程师们,基于检测目标的"三维运动连续性"较"二维外观差异"更具不变性的理论前提,结合高速摄像技术,研发一种"基于空间聚类的低特征场景MOT"技术,通过"几何重建→时空聚类→物理验证→轨迹纠错"四大技术步骤,从数据源头解决特征缺失,规避"深度学习特征增强MOT"和"生成特征增强MOT"对特征的依赖,且空间聚类和投影操作计算轻量,可保障计算效率与实时性,实现低特征场景下的检测-关联完美闭环。
3关键突破
千眼狼围绕检测路径与关联路径,实现四大关键技术环节突破:
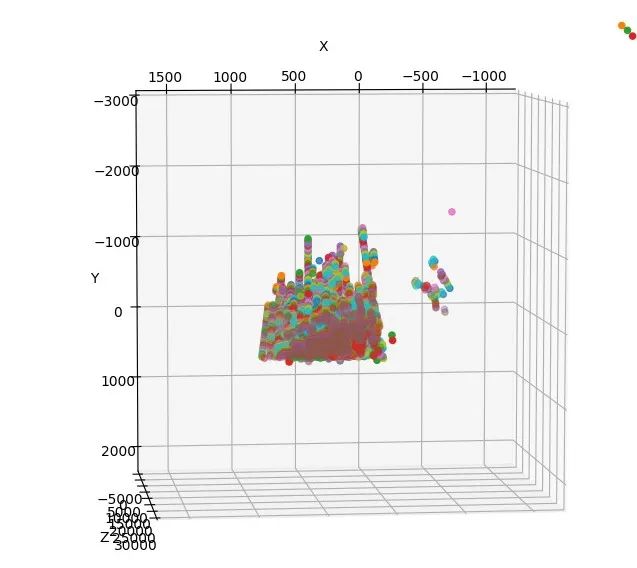
- 几何重建:基于极线约束的双视角匹配与三维重建,即利用左右高速摄像机的内参与外参计算基础矩阵F,并通过极线几何约束筛选匹配点对,最终使用双目几何三角化重建得到3D点云,包含噪声和离群点。
-
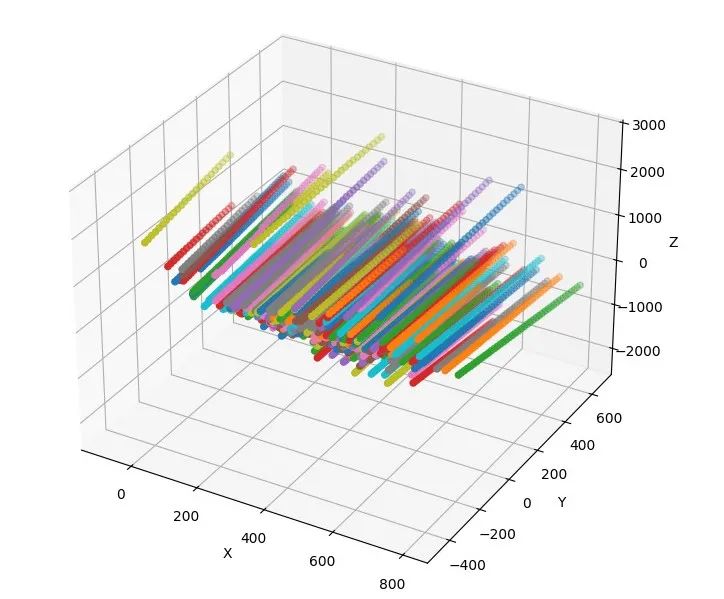
时空聚类:追踪多帧图像中的三维点位置构建三维轨迹,再按空间一致性与帧时间连续性对三维点进行分簇,合并距离接近、变化趋势一致的点形成连续轨迹,删除连续帧中出现次数小于阈值的"短轨迹",以剔除不稳定或偶然出现的噪声点,得到初步筛选后的有效三维轨迹集合。
-
物理验证:将三维轨迹重投影到左右高速摄像机图像平面,对比左右图像上的投影轨迹,去除重复匹配的轨迹。
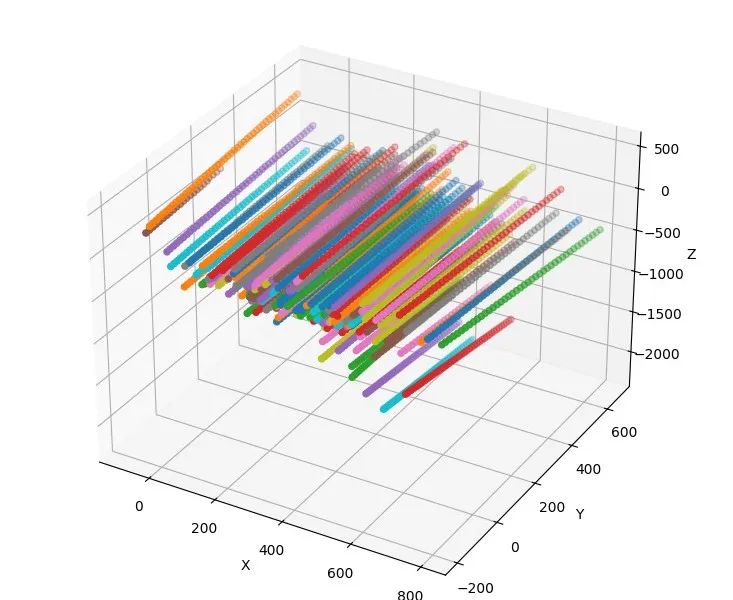
- 轨迹纠错与重连:通过对轨迹进行三维二次曲线拟合,并计算实际轨迹点到拟合曲线的误差,标记超出误差阈值的异常区间,断开异常轨迹段,再依据轨迹分段的空间位置和时间连续性计算相似度,对满足条件的轨迹段进行重连并平滑处理,恢复完整连续轨迹。
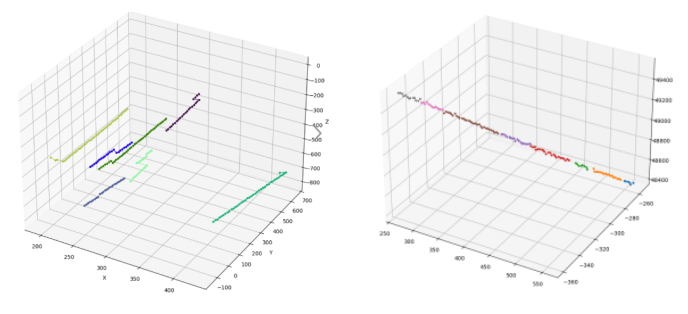
4案例验证
在一项针对数百个快速移动黑色小球进行抛落实验追踪验证中,由于黑色小球表面颜色单一缺乏明显纹理特征,属于典型低特征场景,通过空间聚类MOT的几何重建技术,获取了黑色小球准确的位置信息,利用2D投影剔除一对多误匹配方法,提高了轨迹的唯一性和准确性,再进一步通过对轨迹进行拟合分析识别并修正错误轨迹连接,增强跟踪结果的稳定性和可靠性。
5技术展望
千眼狼"基于空间聚类的MOT技术"通过结合双视角匹配与三维重建,有效解决了低特征环境下的目标跟踪难题,利用极线约束筛选匹配点对,通过三维重建获取准确位置信息,采用空间聚类方法优化轨迹,减少了误匹配和轨迹断裂问题,具有较强的抗噪能力和轨迹纠错机制,显著提升了跟踪精度和稳定性。千眼狼将通过算法优化提高实时性,进一步提升低特征场景下高速运动目标跟踪检测与关联效率。