一、原理作用
ORB 原理 (Oriented FAST and Rotated BRIEF):
特征点检测:使用 FAST 算法检测角点(关键点)。
方向计算:为每个关键点分配主方向,增强旋转不变性。
特征描述:使用 BRIEF(快速二进制描述符),通过图像灰度比较构造描述子。
描述子旋转:将 BRIEF 描述子旋转对齐主方向,增强旋转鲁棒性。
ORB作用 :提取图像中稳定、重复性强的关键点;生成可用于图像匹配、识别、跟踪的紧凑二进制描述子。
应用场景:图像匹配(如拼接、全景)、 SLAM / 视觉里程计(机器人/无人车定位)、物体识别与检测、图像配准与对齐、图像检索
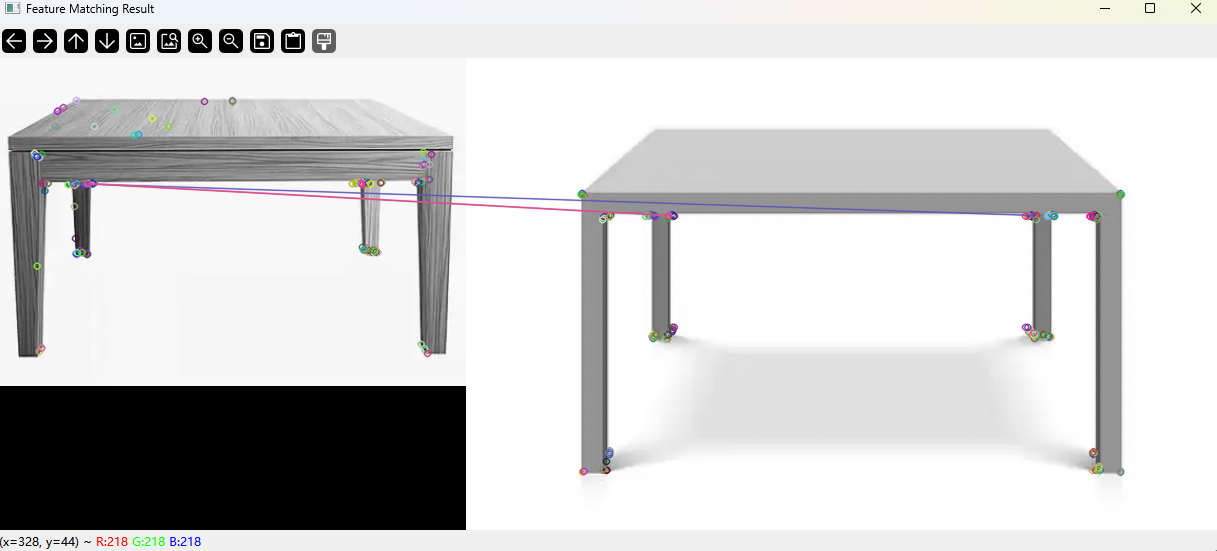
二、实现效果
 三、参考代码
三、参考代码
cpp
void demo(const cv::Mat& img1, const cv::Mat& img2, cv::Mat& outputImg) {
if (img1.empty() || img2.empty()) {
std::cerr << "[feature_matching] Error: Input images are empty." << std::endl;
return;
}
cv::Ptr<cv::ORB> orb = cv::ORB::create();
std::vector<cv::KeyPoint> kp1, kp2;
cv::Mat desc1, desc2;
orb->detectAndCompute(img1, cv::noArray(), kp1, desc1);
orb->detectAndCompute(img2, cv::noArray(), kp2, desc2);
if (desc1.empty() || desc2.empty()) {
std::cerr << "[feature_matching] Warning: Descriptor computation failed." << std::endl;
return;
}
cv::BFMatcher matcher(cv::NORM_HAMMING);
std::vector<std::vector<cv::DMatch>> knn_matches;
matcher.knnMatch(desc1, desc2, knn_matches, 2);
std::vector<cv::DMatch> good_matches;
for (const auto& m : knn_matches) {
if (m.size() >= 2 && m[0].distance < 0.75f * m[1].distance) {
good_matches.push_back(m[0]);
}
}
cv::drawMatches(img1, kp1, img2, kp2, good_matches, outputImg);
}
//应用
void MainWindow::sltOrb()
{
// 加载两张灰度图像
cv::Mat img1 = cv::imread("img1.jpg", cv::IMREAD_GRAYSCALE);
cv::Mat img2 = cv::imread("img2.jpg", cv::IMREAD_GRAYSCALE);
cv::Mat output;
// 调用封装好的 ORB 特征匹配函数
feature_matching::demo(img1, img2, output);
// 显示结果图像
if (!output.empty()) {
cv::imshow("Feature Matching Result", output);
cv::waitKey(0);
}
}欢迎关注我,一起交流!