研究背景
航空航天、能源动力领域,测量三维瞬态流场的速度场信息对于理解流体力学行为、优化系统设计非常关键。
传统三维粒子图像测速技术如Tomo层析PIV,因依赖多相机阵列,存在系统体积、操作复杂,在封闭空间测量存在困难;光场PIV等单相机方案则存在分辨率局限性。
太原理工大学丁老师团队,创新性提出基于单台高速摄像机的三色掩模三维粒子图像测速技术(Trichromatic Mask PIV),开创性通过光学路径调制与智能算法融合,实现全画幅、高分辨率的三维瞬态速度场测量。
研究成果发表于论文《A volumetric particle image velocimetry technique based on single color camera with trichromatic mask》
实验平台
-
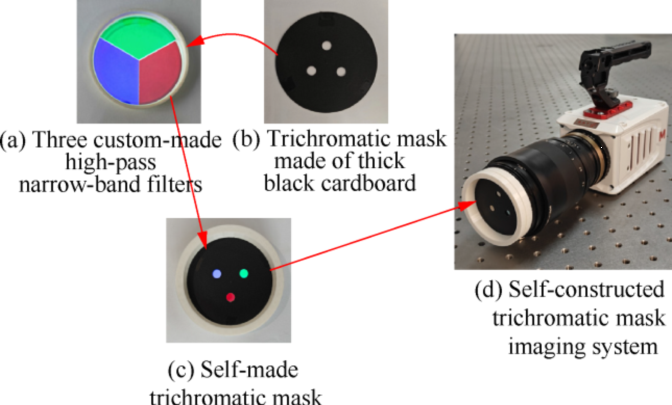
三色掩模成像系统:由千眼狼Revealer Mini系列高速摄像机、定制的三色掩模、镜头组成。三色掩模包含三个波长为450/532/650nm窄带滤光片, 等边三角形排列,安装在相机镜头前。通过三色掩模调制光线颜色信息,使高速摄像机的RGB通道分别记录三个不同视角的图像,实现全视场、全分辨率的3D3C速度场测量。
-
激光照明系统:高能白色激光器,波长450/532/650nm,功率3W,用于激发流场中的示踪粒子。
-
数据采集与处理系统:配备高性能计算机,用于粒子图像数据采集、存储与处理。并采用GPU加速计算。
实验步骤
- 搭建三色掩模成像系统(图1),并进行数据采集,单帧图像通过RGB通道记录三视角粒子信息。
-
通过模拟生成的人工粒子场和合成投影粒子图像,采用MLOS-SMART算法进行三维粒子重建。
-
利用合成的三维高斯涡流场,评估三色掩模PIV技术的速度场测量精度。
-
搭建了零净质量通量喷射流ZNMF实验平台,对三色掩模PIV技术的实际测量能力,与立体PIV和层析PIV技术横向对比验证。
实验数据与结果
- 粒子重建性能验证:通过模拟生成的人工粒子场和合成投影粒子图像,对三色掩模PIV系统的粒子重建性能进行了详细分析。使用MOLS-SMART算法对不同参数下的粒子图像进行三维重建,图2展示了一个具体的三维粒子重建结果。
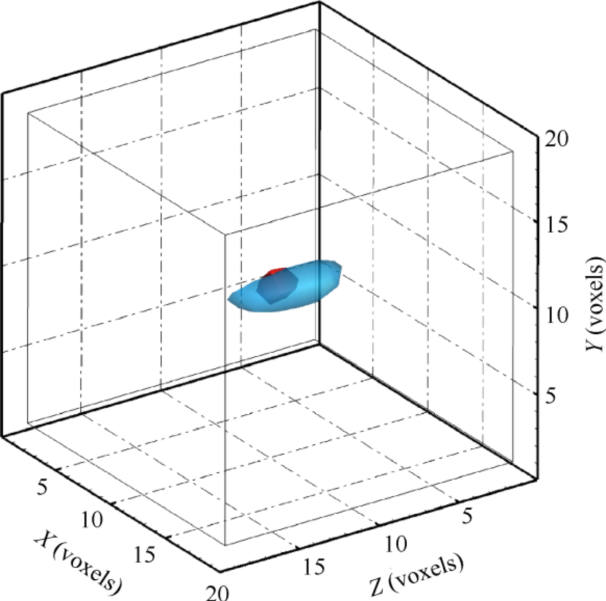
蓝色椭球体代表重建后的粒子形状,深红色表示理想情况下的粒子形状。差异主要由于三色掩模的视角有限,导致粒子深度方向出现延伸效应,影响粒子重建质量,进而影响PIV测量的精度。可通过优化相关参数,如增加光孔直径、增大掩模孔间距、减小焦距和拍摄距离等来增大视场角,改善粒子重建效果。
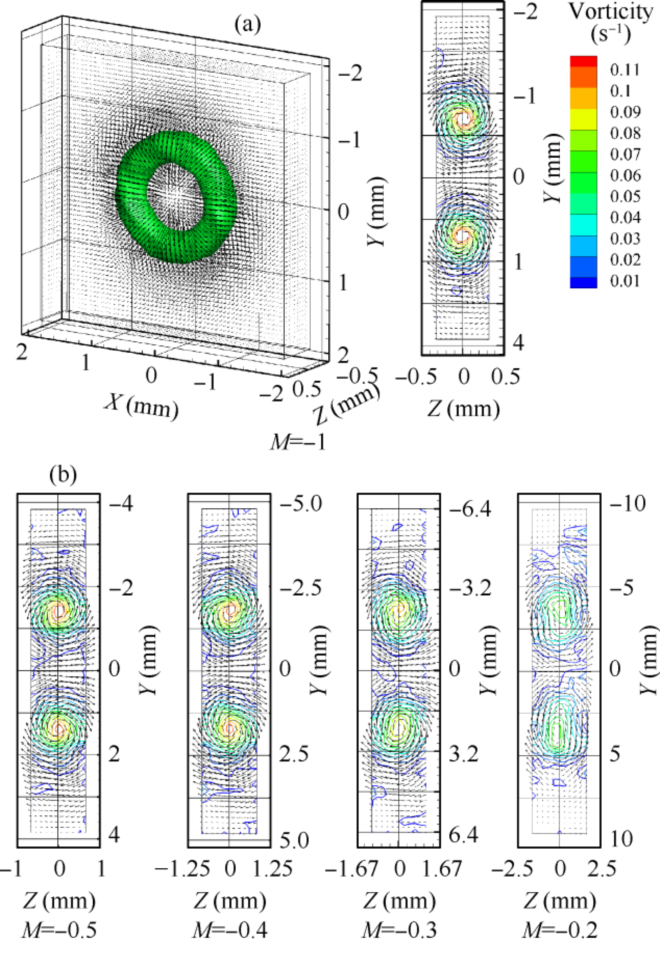
- 合成高斯涡环流场验证:利用合成的三维高斯涡流场,评估三色掩模PIV技术的速度场测量精度。当涡核直径为(1.4/-M)mm,速度场分布与理论模型高度一致。
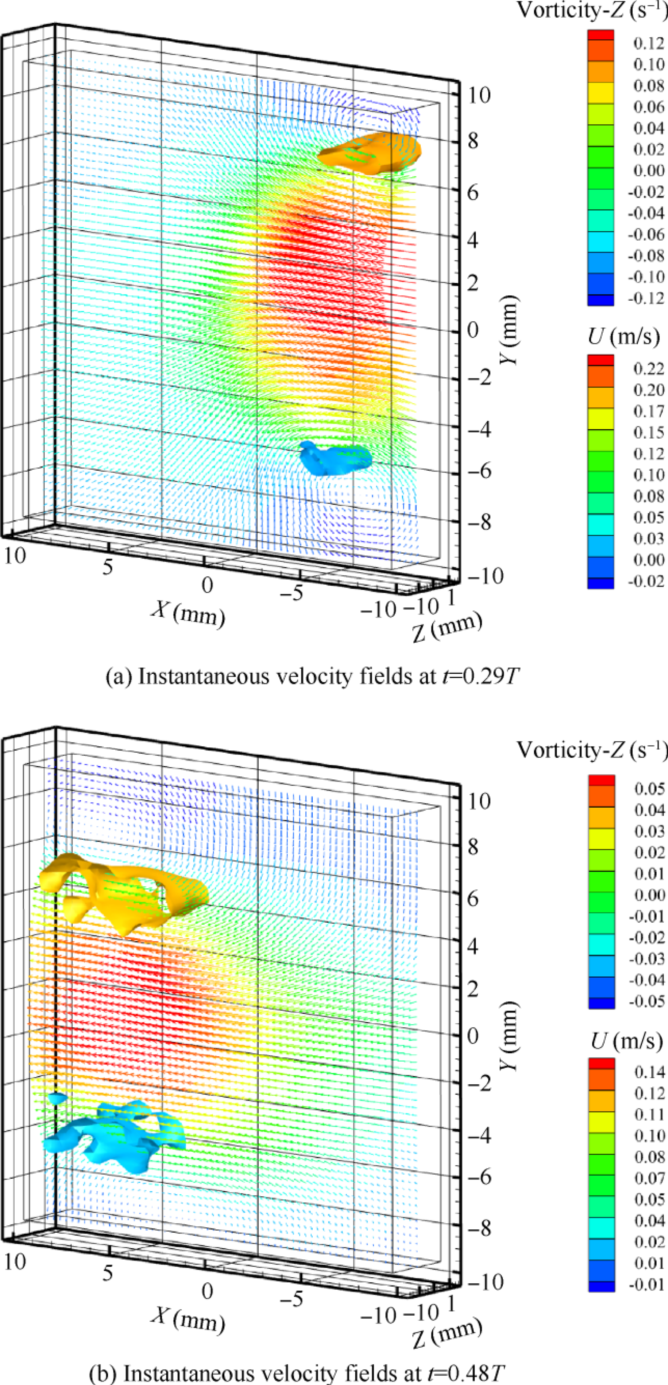
- ZNMF射流实验
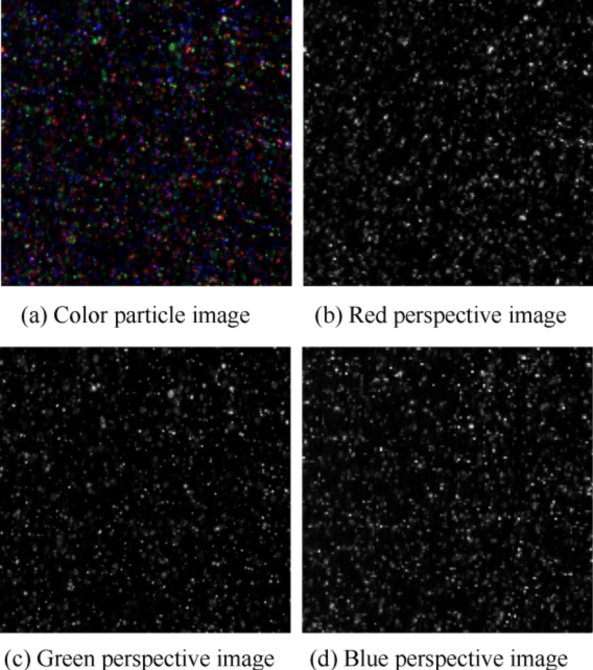
图像处理环节,利用三色掩模成像系统单台高速摄像机捕获的原始粒子图像展现了RGB通道融合的彩色信息(图4(a))。经过颜色串扰校正后,原始图像被分离为红、绿、蓝三个独立视角的灰度图像(图4(b)-(d)),清晰呈现不同空间位置的粒子分布差异:红色视角图像(图4(b))中,喷嘴后方粒子的纵向位移显著,蓝色视角(图4(d))则捕捉到侧向涡结构的细节。
实验结果显示,喷嘴出口瞬时涡环结构(直径10mm,St=0.77,Re=32),速度场与经典射流特性吻合。随着时间推移,主涡环向下游移动,流场的相干性降低,速度矢量和Z方向涡量的大小显著减小。
通过速度梯度变化测试,散度误差Pearson系数Qdiv=0.76,与层析PIV(Qdiv=0.66)及立体PIV(Qdiv=0.82)技术测量结果一致,表明该技术具有较高的测量精度和可靠性。
三色掩模PIV技术作为新型基于单台高速摄像机的3D3C-PIV速度场测量方法,能够准确地重建出流场中粒子的三维空间分布,并计算出瞬态速度场。这为深入研究复杂流场的流动特性提供了有力支持,也验证了三色掩模PIV技术在实际流场测量中的可行性和有效性。未来,三色掩模PIV技术有望在航空航天、能源与动力工程、环境工程等领域发挥更大的作用。