在 MATLAB 中使用 UR5e 机器人模型进行仿真和控制,通常需要结合机器人系统工具箱(Robotics System Toolbox)
UR5e = loadrobot("universalUR5e","DataFormat","column");
UR5e.Gravity = [0 0 -9.81];
% 保存机器人模型到 MAT 文件
save('ur5e_robot_model.mat', 'UR5e');
disp("机器人模型已保存到 ur5e_robot_model.mat");
% smimport(UR5e) showdetails(UR5e)
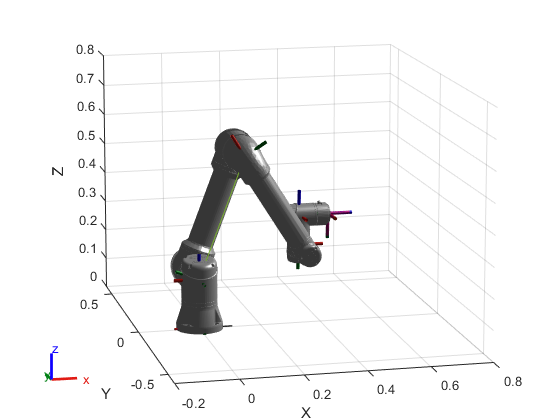
q = [0, -1.2043, 2.2166, 2.1468, -1.508, 0]';
show(UR5e,q);axis([-0.2 0.8 -0.6 0.6 0 0.8]);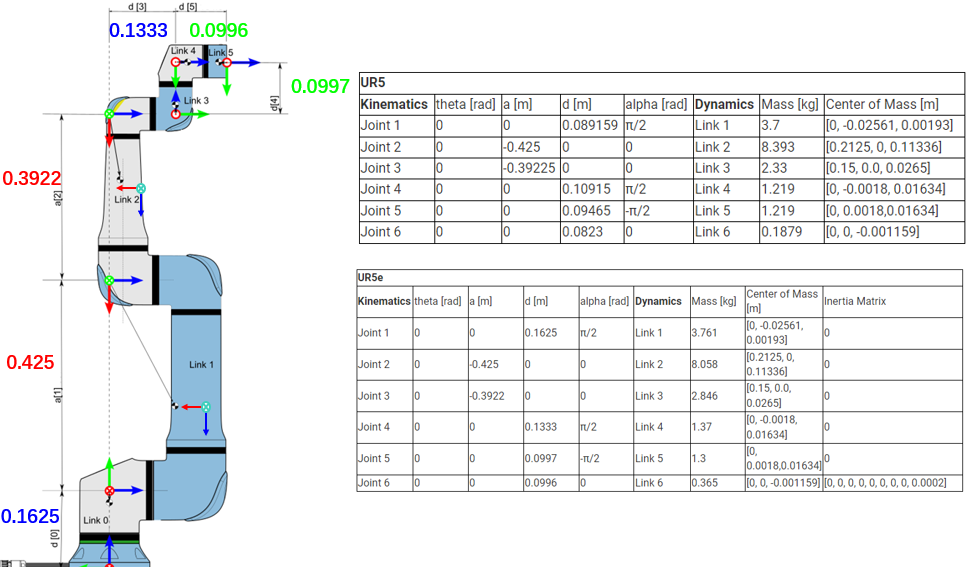
% 初始化机器人模型
UR5e = loadrobot("universalUR5e", DataFormat="row", Gravity=[0 0 -9.81]);
% 初始状态
q = homeConfiguration(UR5e); % 1x6 行向量
dq = zeros(1, numel(q)); % 1x6
tau = zeros(1, numel(q)); % 1x6
% 外部力(列向量):设定为无外力或自定义外力
Fext = zeros(6,1); % 6x1,例如 [Fx; Fy; Fz; Mx; My; Mz]
% 末端执行器名
endEffector = "tool0";
% 计算外力对应的关节空间力矩(J^T * Fext)
tau_ext = (J') * Fext; % 6x1
tau_total = tau - tau_ext'; % 转为行向量 1x6
%% 方法一:forwardDynamics
ddq_fd = forwardDynamics(UR5e, q, dq, tau_total); % 1x6
%% 方法二:手动计算动力学
M = massMatrix(UR5e, q); % 6x6
C = velocityProduct(UR5e, q, dq); % 1x6
G = gravityTorque(UR5e, q); % 1x6
J = geometricJacobian(UR5e, q, endEffector); % 6x6
% ddq 手动计算:ddq = M⁻¹ * (tau_total - C - G)
ddq_manual = (-C - G + tau_total) / M; % 1x6
%% 输出对比
disp('Forward Dynamics ddq:');
disp(ddq_fd);
disp('Manual Calculation ddq:');
disp(ddq_manual);
disp('Difference (manual - fd):');
disp(ddq_manual - ddq_fd);
%机器人工具箱 roblocks
% http://www.petercorke.com/Robotics_Toolbox.html
% UR5 mdl_ur5 可加载出ur5DH、qz、qr