弹性算法理论基础
想清楚 局部最优 是什么,如果可以推导出全局最优,那就是正确的贪心算法
455. 分发饼干
题目
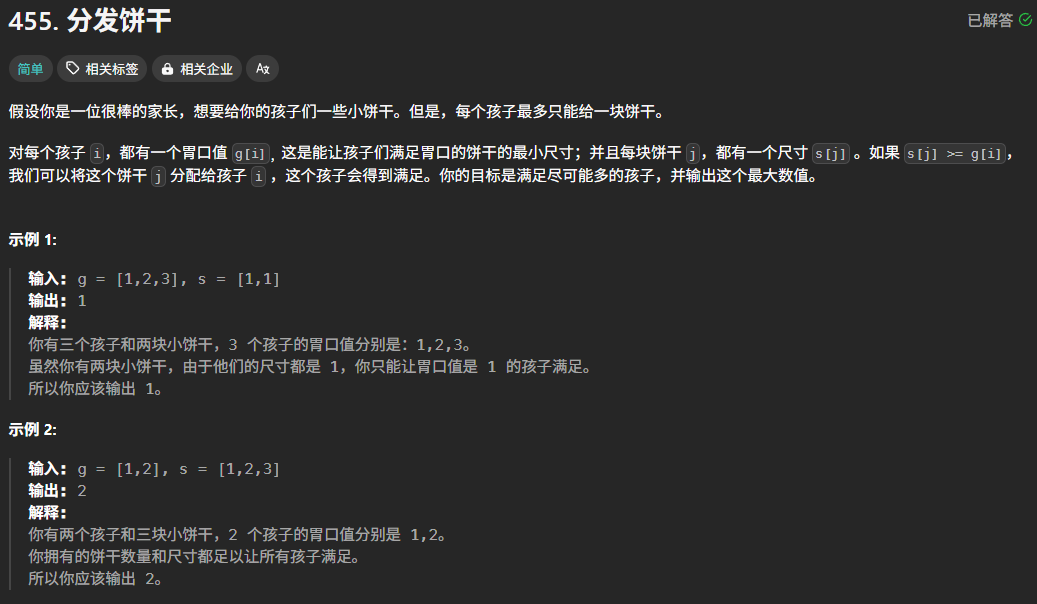
思路与解法
python
class Solution:
def findContentChildren(self, g: List[int], s: List[int]) -> int:
res = 0
i = 0
j = 0
g.sort()
s.sort()
while i < len(s) and j < len(g):
if s[i] >= g[j]:
res += 1
j += 1
i += 1
return res
376. 摆动序列
题目
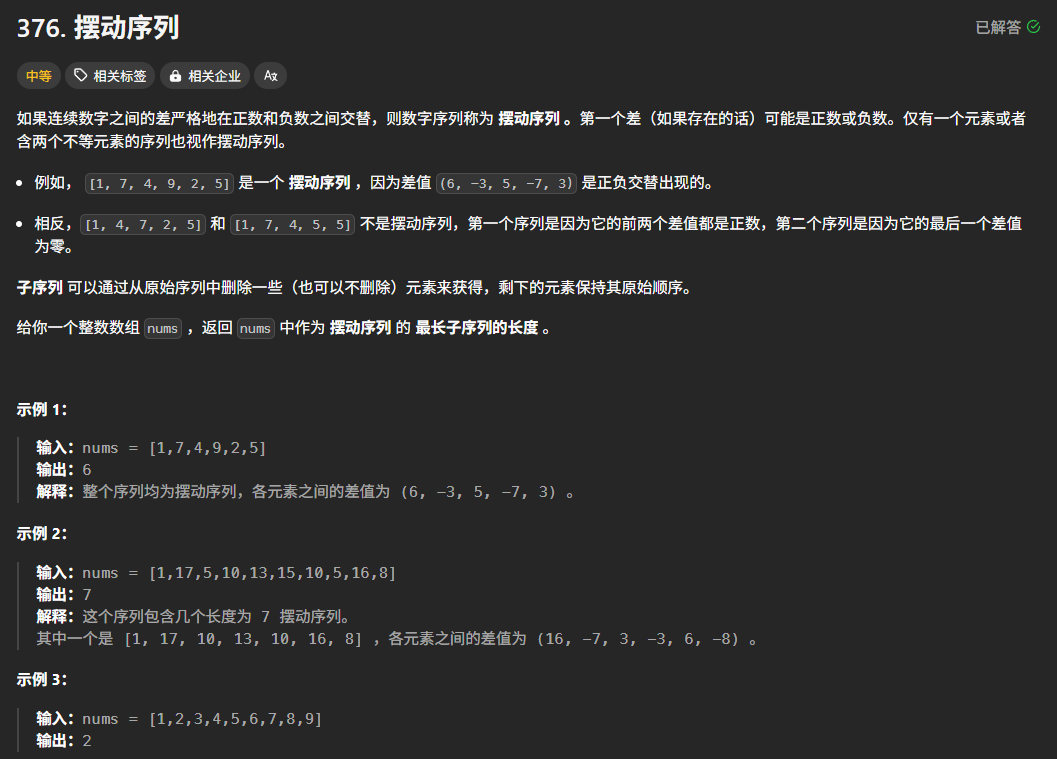
思路与解法
没太懂,但是不想细想了
python
class Solution:
def wiggleMaxLength(self, nums: List[int]) -> int:
if len(nums) <= 1:
return len(nums) # 如果数组长度为0或1,则返回数组长度
curDiff = 0 # 当前一对元素的差值
preDiff = 0 # 前一对元素的差值
result = 1 # 记录峰值的个数,初始为1(默认最右边的元素被视为峰值)
for i in range(len(nums) - 1):
curDiff = nums[i + 1] - nums[i] # 计算下一个元素与当前元素的差值
# 如果遇到一个峰值
if (preDiff <= 0 and curDiff > 0) or (preDiff >= 0 and curDiff < 0):
result += 1 # 峰值个数加1
preDiff = curDiff # 注意这里,只在摆动变化的时候更新preDiff
return result # 返回最长摆动子序列的长度53. 最大子序和
题目
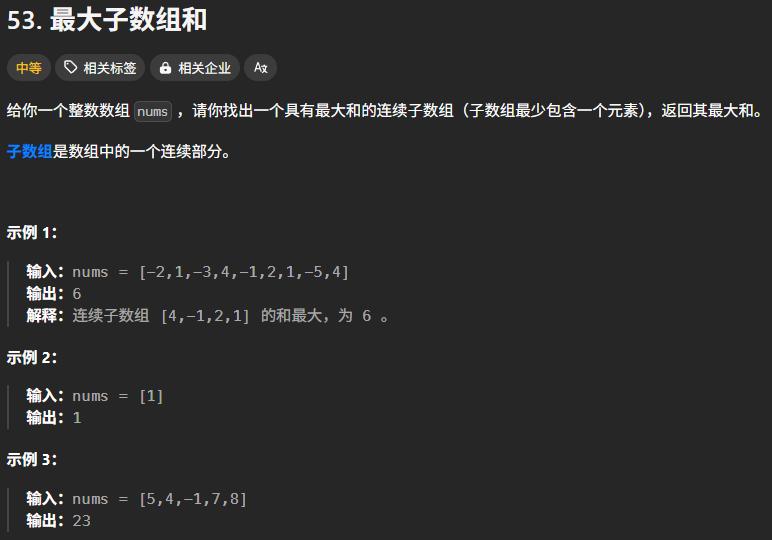
思路与解法
python
class Solution:
def maxSubArray(self, nums: List[int]) -> int:
res = float('-inf')
count = 0
for i in range(len(nums)):
count += nums[i]
if count > res:
res = count
if count < 0:
count = 0
return res