在自然界的生存竞赛里,节肢动物堪称视觉界的 "卷王"!那些长着复眼的小机灵鬼,比如蜜蜂、蜻蜓,别看个头小,视觉能力却超强。
现在,科学家把它们的眼睛 " 偷"过来啦 ------ 不是真偷,而是仿造!结合 AI 搞出了个超牛的视觉系统,既能拍高清全景,又能玩 3D 追踪,简直是给机器装上了" 昆虫之眼 "。这到底是怎么做到的?咱们今天就来扒一扒!
* 本文只做阅读笔记分享 *
一、节肢动物复眼大揭秘
1. 自然复眼的神奇结构
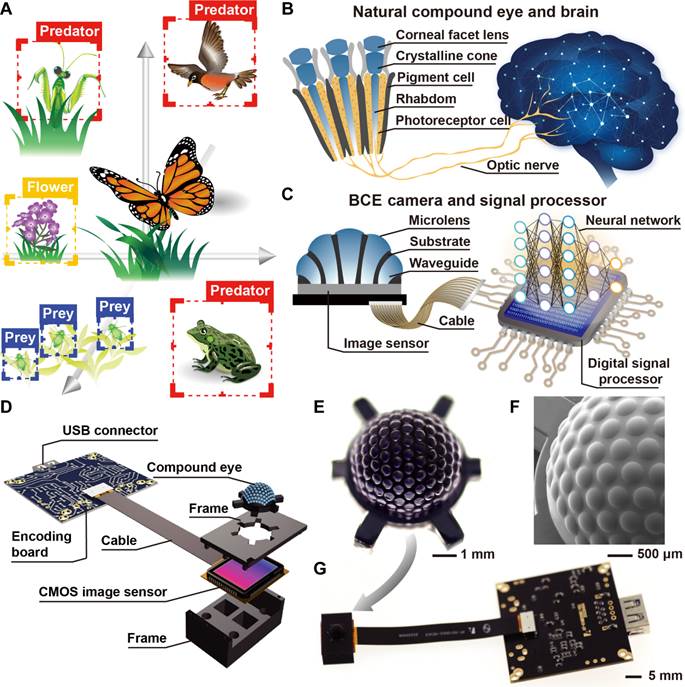
节肢动物的复眼就像无数个小望远镜拼起来的球。每个小眼叫 "小眼面",能从不同方向看东西,凑在一起就有了超广视野。不过呢,每个小眼面只有几个感光细胞,单独看就像打了马赛克。但人家进化了 5 亿多年,愣是用这 "低像素" 眼睛学会了认颜色、找对象、躲天敌,比咱们手机的超广角镜头还智能!
2. 仿生复眼的挑战
科学家想仿造复眼,最大的难题就是:怎么把半球形的复眼和平面传感器接起来?以前试过柔性光电阵列,也试过用微透镜导光,但仿造的复眼都有个毛病 ------ 像素太低,图像跟打了码似的。就像你用玩具相机拍照,只能看个大概轮廓。
二、 AI + 仿生复眼:科技狠活登场
1. 仿生复眼相机的黑科技
现在的仿生复眼相机,用微流体辅助 3D 打印造出来,直径才 5 毫米,里面塞了 127 个小眼面。每个小眼面由微透镜和光波导组成,像给每个小眼配了个 "光导管",把光引到平面传感器上。最绝的是,它有效像素达到 430 万,视野 165°,连 40 微米的细节都能看清 ------ 相当于能看见蚂蚁腿上的毛!
2. AI 让复眼变聪明
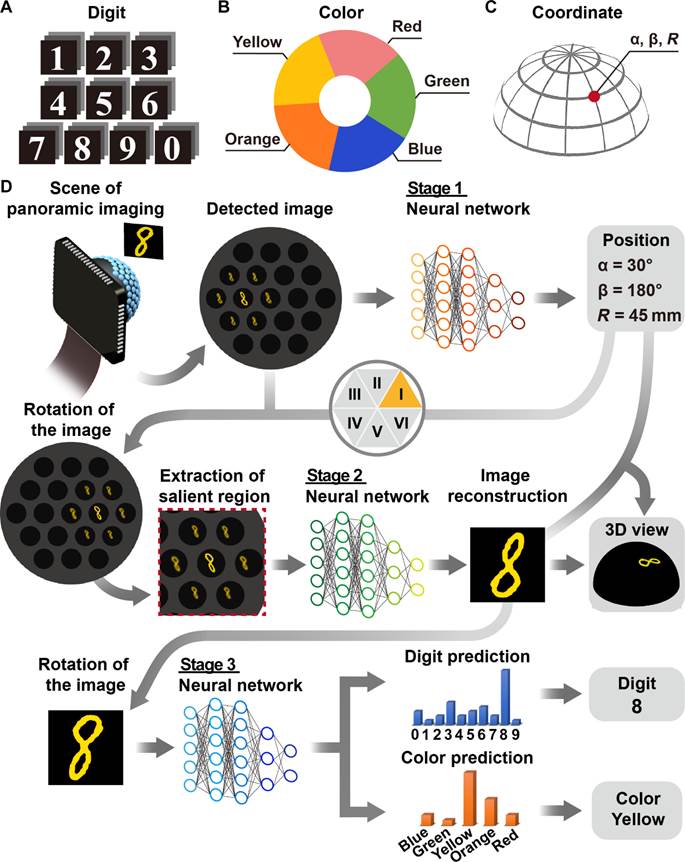
光有硬件还不够,科学家给它装上了 "大脑"------ 三级神经网络。第一级像视觉注意力,专门找目标;第二级重建图像,把马赛克变高清;第三级认图案、分颜色。比如看到一个蓝色的 "8",它能先定位,再把图像转正,最后告诉你 "这是蓝色的 8",准确率高达 95%!
三、全能视觉:从拍照到追踪
1. 全景成像与 3D 定位
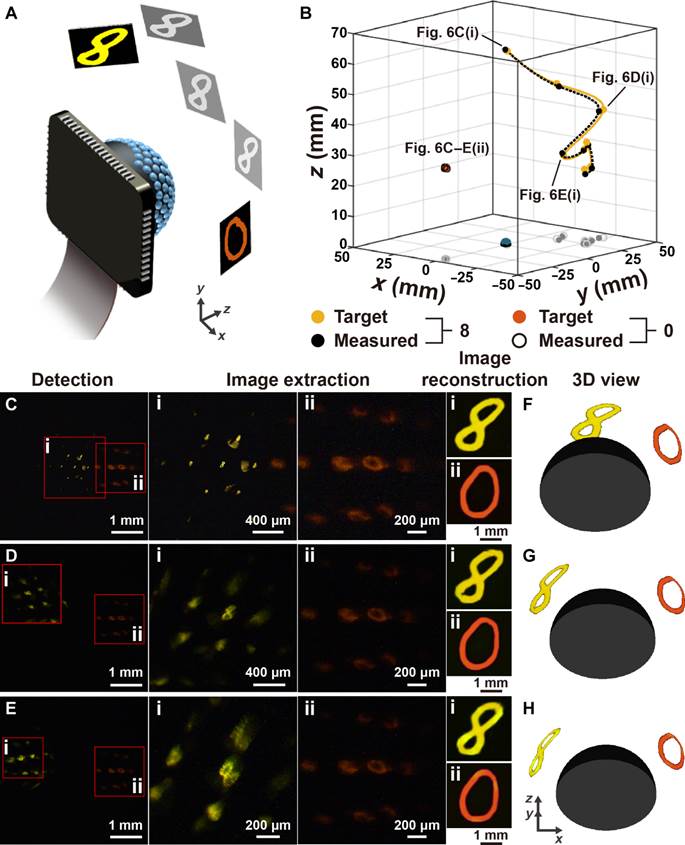
这系统牛就牛在能同时干好多事。比如拍全景时,周围的物体在复眼里会重复出现,AI 通过分析这些重复图案,能算出物体的 3D 位置,误差小于 2.6°。
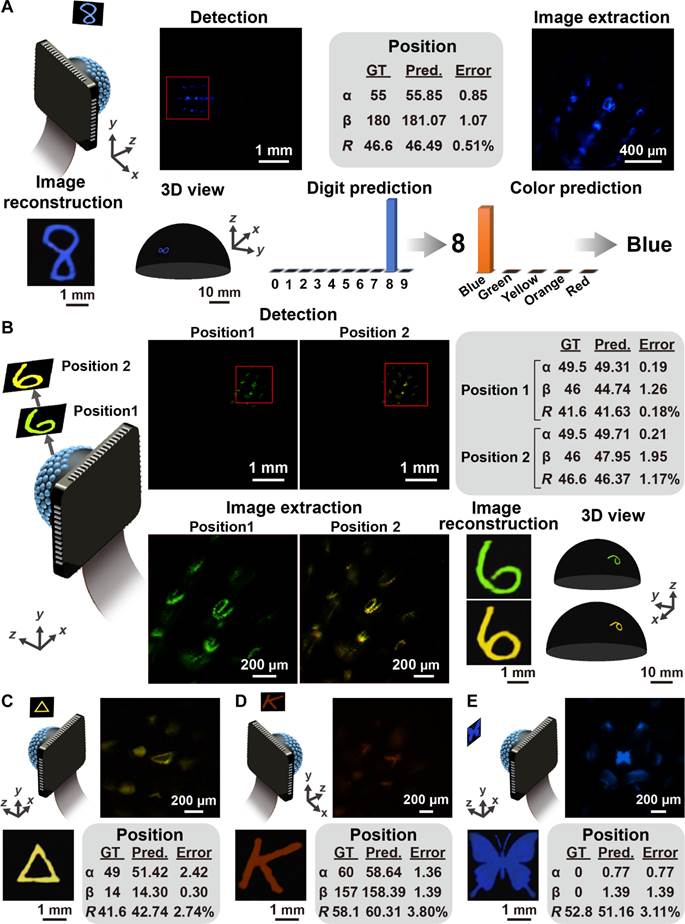
2. 多目标追踪秀操作
更绝的是多目标追踪!一个橙色 "0" 固定不动,一个黄色 "8" 绕着它转,这系统能同时追踪两个目标,分别重建图像,互不干扰。
四、未来已来:仿生视觉的妙用
这种仿生视觉系统以后能干啥?在医疗上,能塞进胶囊做内镜;在机器人身上,能让无人机避障;甚至能装在监控里,360° 无死角看全场。想想看,以后的手机摄像头可能长成蜜蜂眼睛的样子,拍出来的照片自带 3D 效果,是不是很酷?最后送大家一句话:自然界的设计师永远比人类更懂 "黑科技"!
一起来做做题吧
1、节肢动物复眼的主要优势在于?
A. 高分辨率单眼成像
B. 超广视角与深度感知
C. 彩色夜视能力
D. 动态模糊消除
2、文中仿生复眼相机的有效像素数为?
A. 127 万像素
B. 430 万像素
C. 800 万像素
D. 1200 万像素
3、仿生复眼的小眼面由什么组成?
A. 微透镜 + 光波导
B. 柔性光电阵列 + 传感器
C. 微型 CCD + 反光镜
D. 纳米天线 + 感光层
4、该系统中用于目标定位的神经网络模型是?
A. ResNet34
B. MobileNetV2
C. YOLOv5s
D. GoogleNet
5、图像重建阶段使用的神经网络类型是?
A. 残差神经网络
B. 循环神经网络
C. 生成对抗网络
D. 卷积自编码器
6、仿生复眼相机的水平视角范围是?
A. 360° 全视角
B. 165°×360°
C. 90°×180°
D. 45°×90°
7、该系统对目标的 3D 定位误差范围是?
A. 角度误差 < 2.6°,距离误差 < 2.3%
B. 角度误差 < 5°,距离误差 < 5%
C. 角度误差 < 10°,距离误差 < 10%
D. 角度误差 < 15°,距离误差 < 15%
8、与传统仿生复眼相比,该系统的主要突破是?
A. 采用柔性基底
B. 结合 AI 实现多任务处理
C. 使用纳米材料
D. 集成红外成像功能
9、下列哪项不属于该系统的潜在应用?
A. 胶囊内镜诊断
B. 无人机避障导航
C. 深海探测机器人
D. 手机全景摄影
10、该系统对图案识别的准确率为?
A. 90%
B. 95%
C. 98%
D. 100%
参考文献:
Yan Long et al. Seeing through arthropod eyes: An AI-assisted, biomimetic approach for high-resolution, multi-task imaging.Sci. Adv.11, eadt3505(2025).