本文将展示YOLOv8中损失函数计算的完整代码解析,注释中提供了详尽的解释,并结合示例演示了数据维度的转换,以帮助更好地理解。
YOLOv8的损失函数计算代码位于'ultralytics/utils/loss.py'文件中(如下所示),我在代码中的注释提供了详细解析。
首先看一下整体包含哪些方法
__init__和preprocess的代码如下
python
class v8DetectionLoss:
"""Criterion class for computing training losses for YOLOv8 object detection."""
def __init__(self, model, tal_topk=10): # model must be de-paralleled
"""Initialize v8DetectionLoss with model parameters and task-aligned assignment settings."""
# 获取模型的设备信息(模型参数所在的设备 CPU/GPU)
device = next(model.parameters()).device # get model device
# 获取模型的超参数配置(如超参数字典,包含损失权重等)
h = model.args # hyperparameters
# 获取模型最后一层,一般是 Detect() 模块,其中包含输出相关的属性
m = model.model[-1] # Detect() module
# 定义二元交叉熵损失(带Logits版),用于分类损失计算(reduction="none"表示不在内部求和,保留逐元素损失)
self.bce = nn.BCEWithLogitsLoss(reduction="none")
# 保存超参数配置到属性 hyp,以便后续使用(例如获取损失权重)
self.hyp = h
# 模型的步长列表,每个输出层相对于原图的下采样倍数
self.stride = m.stride # model strides
# 模型的类别数(number of classes)
self.nc = m.nc # number of classes
# 输出通道数 no = 类别数 + 每个边界框预测的分布参数数目 (reg_max * 4)
# 例如,如果类别数 nc=80,reg_max=16,则 no = 80 + 16*4 = 144
self.no = m.nc + m.reg_max * 4
# 每个边界框回归的最大分布区间(reg_max,一般用于分布Focal Loss)
self.reg_max = m.reg_max
# 保存设备信息到属性 device
self.device = device
# 标志是否使用 DFL(Distribution Focal Loss),当 reg_max > 1 时使用
self.use_dfl = m.reg_max > 1
# 初始化任务对齐分配器(Task-Aligned Assigner),用于在训练时匹配预测和真实目标
self.assigner = TaskAlignedAssigner(topk=tal_topk, num_classes=self.nc, alpha=0.5, beta=6.0)
# 初始化边界框损失函数(BboxLoss),传入 reg_max,用于计算边界框的回归损失(如 IoU 和 DFL)
self.bbox_loss = BboxLoss(m.reg_max).to(device)
# 创建投影张量 self.proj,用于将分布转换为具体距离(值为0,1,...,reg_max-1),放在与模型相同的设备上
self.proj = torch.arange(m.reg_max, dtype=torch.float, device=device)
def preprocess(self, targets, batch_size, scale_tensor):
"""
预处理目标数据:转换为张量格式并缩放坐标
模型需要固定形状的输入(如 (batch_size, N, 5)),而原始标注的目标数量是动态的。
比如targets中的nl(总目标数),不同batch中的总目标数不一样,预测的结果难以统一。
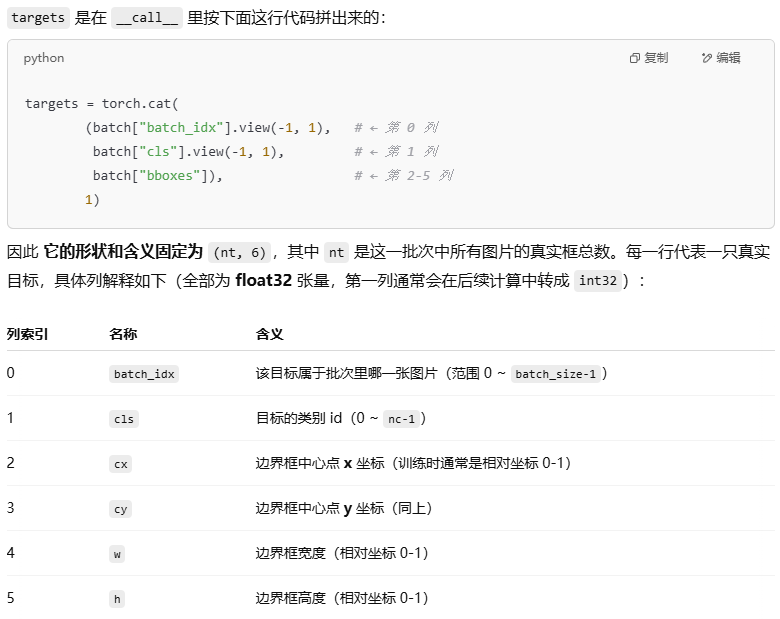
targets 是在 __call__ 里用concat拼出来的:
参数:
targets: 原始标注数据,形状为(nl, ne),其中
nl = 当前batch的总目标数
ne = [batch_index, class_id, x_center, y_center, width, height]
batch_size: 当前batch的样本数
scale_tensor: 缩放因子(用于将归一化坐标还原为输入图像尺度)
示例输入:
batch_size=2
targets = [
[0, 3, 0.5, 0.5, 0.2, 0.3], # 图像0中的目标
[0, 1, 0.3, 0.4, 0.1, 0.2],
[1, 5, 0.7, 0.8, 0.2, 0.1] # 图像1中的目标
]
scale_tensor = tensor([640, 640, 640, 640])(假设输入图像尺寸为640x640)
"""
nl, ne = targets.shape
if nl == 0: # 如果当前batch没有目标
'''
out是预处理后的目标张量,其形状为: (batch_size, max_targets_per_image, 5)
其中:
batch_size:当前批次的图像数量(例如2)。
max_targets_per_image:当前批次中单张图像的最大目标数量(例如10)。
5: 每个目标的属性,格式为 [class_id, x_min, y_min, x_max, y_max]。
'''
out = torch.zeros(batch_size, 0, ne - 1, device=self.device)
else:
i = targets[:, 0] # 取出了所有真实框的图像索引列,方便按图像分组统计。
# 计算每个图像的目标数
# 对一维张量i做去重,并计算每个唯一值出现的次数。counts里的每个元素就是对应那张图像有多少个真实框。
_, counts = i.unique(return_counts=True)
counts = counts.to(dtype=torch.int32)
# 创建输出张量:形状为(batch_size, max_counts, ne-1)
# 示例:当max_counts=2时,形状为(2, 2, 5)
out = torch.zeros(batch_size, counts.max(), ne - 1, device=self.device)
# 按图像填充数据
for j in range(batch_size):
'''
例:假设 batch_size=3 且
i = tensor([0, 0, 1, 2, 2]) # 5 个框
• 当 j = 0 :
matches = tensor([ True, True, False, False, False])
• 当 j = 1 :
matches = tensor([False, False, True, False, False])
• 当 j = 2 :
matches = tensor([False, False, False, True, True ])
matches 是一个布尔张量,标记哪些目标属于第 j 张图像
'''
matches = i == j
if n := matches.sum(): # 该图像有n个目标
# 将匹配的目标数据存入out[j],去除第一列(图像索引)
# 示例:当j=0时,存入前两个目标的[3,0.5,0.5,0.2,0.3]和[1,0.3,0.4,0.1,0.2]
out[j, :n] = targets[matches, 1:] # [max_counts, 5]
# 将坐标从归一化的xywh转换为图像尺度的xyxy
# out[..., 1:5]形状:(batch_size, max_counts, 4)
# 示例转换前:[[0.5,0.5,0.2,0.3], ...] 归一化的xywh
# 转换后得到绝对坐标:[[320, 320, 192, 384], ...]
out[..., 1:5] = xywh2xyxy(out[..., 1:5].mul_(scale_tensor))
return out # 输出形状:(batch_size, max_counts, 5)上面代码中的targets来源如下
bbox_decode代码如下:
python
def bbox_decode(self, anchor_points, pred_dist):
"""
将网络输出的 **距离分布(pred_dist)** 解码成最终的边界框坐标 (x1,y1,x2,y2)。
─────────────────────────────────────────────────────────────
✦ 参数说明
----------------------------------------------------------------
anchor_points : Tensor(shape=(A, 2))
→ 每个输出位置(=anchor) 在特征图上的中心点坐标 (cx, cy),已按 stride
归一化到与 pred_dist 同尺度;A=全部输出点总数 (H₁W₁+H₂W₂+...)
pred_dist : Tensor(shape=(B, A, 4*reg_max))
→ 模型回归头直接输出的 **离散距离分布**:
对于每个 anchor,一共 4 个方向(左、上、右、下),
每个方向用 reg_max 个 bin 表示离地的概率分布。
例:batch_size(B)=2,A=8400,reg_max=16
⇒ pred_dist.shape = (2, 8400, 4*16=64)
✦ 返回值
Tensor(shape=(B, A, 4)) # 对应每个 anchor 的 [l, t, r, b] 像素距离
─────────────────────────────────────────────────────────────
"""
# 1) 如果使用 Distribution Focal Loss(DFL) ------ reg_max > 1
if self.use_dfl: # True 当 reg_max > 1
b, a, c = pred_dist.shape # b=B, a=A, c=4*reg_max
# ---------- ① view ----------
# 把 "channel = 4*reg_max" 拆成 "4 个方向 × reg_max bins"
# (B, A, 64) → (B, A, 4, 16)
pred_dist = pred_dist.view(b, a, 4, c // 4)
# ---------- ② softmax ----------
# 对最后一维(16)做 softmax → 获得离散概率分布
pred_dist = pred_dist.softmax(3)
# ---------- ③ 期望值 (matmul) ----------
# self.proj = tensor([0,1,2,...,15]) ← shape (16,)
# 期望 = Σ p_k * k
# 形状推导:
# (B, A, 4, 16) @ (16,) → (B, A, 4)
pred_dist = pred_dist.matmul(self.proj.type(pred_dist.dtype))
# ⚠️ 此时 pred_dist 的含义已经从"概率分布"→"具体距离值(左,上,右,下)"
# ▼ 小示例(单 anchor)------------------------------------
# 假设 reg_max=4, softmax 结果 = [0.1, 0.2, 0.6, 0.1]
# self.proj = [0, 1, 2, 3]
# 距离 = 0*0.1 + 1*0.2 + 2*0.6 + 3*0.1 = 1.7
# --------------------------------------------------------
# 2) 将 "距离格式(l,t,r,b)" 转成 "bbox 坐标(x1,y1,x2,y2)"
# dist2bbox 内部做:x1 = cx - l , y1 = cy - t
# x2 = cx + r , y2 = cy + b
# 如果 xywh=False ⇒ 返回 xyxy
bboxes = dist2bbox(pred_dist, # (B, A, 4) 距离
anchor_points, # (A, 2) 锚点中心
xywh=False) # ← 输出 xyxy
return bboxes形状与数据流全览(以 B=2, A=8400, reg_max=16 为例)
| 步骤 | 张量名 | 形状 | 备注 |
|---|---|---|---|
| 输入 | pred_dist |
(2, 8400, 64) |
每点 64 通道 = 4×16 |
| ① | view |
(2, 8400, 4, 16) |
拆成 4 方向 × 16 bin |
| ② | softmax |
(2, 8400, 4, 16) |
每方向得到概率分布 |
| ③ | matmul |
(2, 8400, 4) |
期望 → 距离值 (l,t,r,b) |
| ④ | dist2bbox |
(2, 8400, 4) |
计算 (x1,y1,x2,y2) |
__call__代码如下:
python
def __call__(self, preds, batch):
"""
计算一个 batch 的 3 项损失 (box / cls / DFL) 并返回总损失。
下面的中文注释**带着具体数字示例**来演示每一步张量维度的变化,
方便对 YOLOv8 的内部维度有直观认识。
─────────────────────────────── 示例假设 ───────────────────────────────
• batch_size = 2 # 这一 batch 有 2 张图片
• 模型输出 3 个特征层 feats:
┌──feature0: (B, no, 80, 80) → 80×80 = 6400 点
├──feature1: (B, no, 40, 40) → 40×40 = 1600 点
└──feature2: (B, no, 20, 20) → 20×20 = 400 点
⇒ total_points = 6400 + 1600 + 400 = 8400
• nc = 80 # COCO 数据集 80 类
• reg_max = 16 # DFL 每方向 16 bins
⇒ no = nc + 4*reg_max = 80 + 64 = 144
所以:
feature0.shape = (2, 144, 80, 80)
feature1.shape = (2, 144, 40, 40)
feature2.shape = (2, 144, 20, 20)
───────────────────────────────────────────────────────────────────────
"""
# 1⃣ 初始化损失向量 [box, cls, dfl]
loss = torch.zeros(3, device=self.device)
# 2⃣ 拿到特征层列表 feats
# 如果模型还输出了 mask/proto 等信息时,preds = (proto, feats)
feats = preds[1] if isinstance(preds, tuple) else preds
# 3⃣ 把 3 个特征层拼接成一个大张量,
# 同时把通道 no 拆分为回归分布(pred_distri)和分类分数(pred_scores)
# --- 3.1 先 view ---
# 把 (B, no, H, W) → (B, no, H*W)
# 以 feature0 为例: (2, 144, 80, 80) → (2, 144, 6400)
# 三层分别得到 (2,144,6400), (2,144,1600), (2,144,400)
# --- 3.2 再 cat ---
# 按 dim=2 把三个张量拼成 (2, 144, 8400)
cat_out = torch.cat(
[xi.view(feats[0].shape[0], self.no, -1) # -1 相当于 H*W
for xi in feats],
dim=2
) # ⇒ shape = (2, 144, 8400)
# --- 3.3 split ---
# 在 dim=1(通道维) 按 (64, 80) 切两块
# · pred_distri : (2, 64, 8400) ← 4*reg_max
# · pred_scores : (2, 80, 8400) ← nc
pred_distri, pred_scores = cat_out.split((self.reg_max * 4, self.nc), dim=1)
# 4⃣ 为后续计算把维度换成 (B, 8400, C)
# permute(0,2,1) 即把通道维和点数维互换
pred_scores = pred_scores.permute(0, 2, 1).contiguous() # (2, 8400, 80)
pred_distri = pred_distri.permute(0, 2, 1).contiguous() # (2, 8400, 64)
# 5⃣ 记录一些常用量
batch_size = pred_scores.shape[0] # =2
dtype = pred_scores.dtype
# 6⃣ 计算此层对应的 **原图尺寸** (img_h, img_w)
# 假设最小特征层 stride=8, feats[0].shape[2:]=(80,80)
imgsz = torch.tensor(feats[0].shape[2:], device=self.device, dtype=dtype) \
* self.stride[0] # (80,80)*8 → (640,640)
# 7⃣ 生成 anchor_points 和 stride_tensor
# anchor_points.shape = (8400, 2) ← (cx, cy) in feature space
# stride_tensor.shape = (8400, 1) ← 每点对应的 stride
anchor_points, stride_tensor = make_anchors(feats, self.stride, 0.5)
# 8⃣ 组装并预处理 targets
# 原始 batch 字典里是分散的,拼成 (nt,6) → preprocess → (B, M, 5)
targets = torch.cat((batch["batch_idx"].view(-1, 1), # (nt,1)
batch["cls"].view(-1, 1), # (nt,1)
batch["bboxes"]), 1).to(self.device)
targets = self.preprocess(targets,
batch_size,
scale_tensor=imgsz[[1, 0, 1, 0]]) # (2, M, 5)
gt_labels, gt_bboxes = targets.split((1, 4), 2) # (2,M,1) (2,M,4)
mask_gt = gt_bboxes.sum(2, keepdim=True).gt_(0) # (2,M,1) True/False
# 9⃣ 把离散分布解码成 bbox 距离 → bbox 坐标
pred_bboxes = self.bbox_decode(anchor_points, pred_distri)
# shape = (2, 8400, 4) [x1,y1,x2,y2] 特征图尺度
# 🔟 assigner 做正负样本匹配,得到:
# target_bboxes (2, 8400, 4) 给回归分支一个要对齐到的坐标真值。
# target_scores (2, 8400, 80) 给分类分支一个带权重的一热标签矩阵,权重代表匹配质量,质量越高分类损失权重越大。
# fg_mask (2, 8400) 告诉回归分支哪些 anchor 参与回归损失。
_, target_bboxes, target_scores, fg_mask, _ = self.assigner(
pred_scores.detach().sigmoid(), # (2,8400,80)
(pred_bboxes.detach() * stride_tensor).type(gt_bboxes.dtype),
anchor_points * stride_tensor,
gt_labels, gt_bboxes, mask_gt)
# 11⃣ 计算分类损失 (BCE)
target_scores_sum = max(target_scores.sum(), 1)
loss[1] = self.bce(pred_scores, target_scores.to(dtype)).sum() / target_scores_sum
# 12⃣ 计算回归 / DFL 损失(仅正样本)
if fg_mask.sum():
target_bboxes /= stride_tensor # 按 stride 还原到特征尺度
loss[0], loss[2] = self.bbox_loss(
pred_distri, pred_bboxes, anchor_points,
target_bboxes, target_scores, target_scores_sum, fg_mask)
# 13⃣ 乘以超参权重
loss[0] *= self.hyp.box # IoU / bbox
loss[1] *= self.hyp.cls # 分类
loss[2] *= self.hyp.dfl # DFL
# 14⃣ 返回
total_loss = loss.sum() * batch_size # 注意 *B 做到"每张图总损失求和"
return total_loss, loss.detach() # loss = [box, cls, dfl]上述代码中的BboxLoss代码如下所示:
python
class BboxLoss(nn.Module):
"""
负责计算 YOLOv8 "边界框回归" 两项损失:
① IoU 损失(这里用 CIoU)
② DFL(Distribution Focal Loss)------ 只有 reg_max > 1 时才启用
下文所有注释都混入了 **示例数字**,沿用前面提到的场景:
batch_size = 2
total_points = 8400
reg_max = 16
"""
def __init__(self, reg_max: int = 16):
super().__init__()
# 如果 reg_max>1 才需要 DFLoss,否则就说明只做普通 L1/IoU,不用分布回归
self.dfl_loss = DFLoss(reg_max) if reg_max > 1 else None
def forward(
self,
pred_dist, # (B, N, 4*reg_max) ← 例: (2, 8400, 64)
pred_bboxes, # (B, N, 4) ← 例: (2, 8400, 4) [x1,y1,x2,y2] (特征尺度)
anchor_points, # (N, 2) ← (8400, 2) 每个 anchor 的中心点 (cx,cy)
target_bboxes, # (B, N, 4) ← 跟 pred_bboxes 同形
target_scores, # (B, N, nc) ← 用于加权的匹配质量分数
target_scores_sum, # 标量 ← 正样本权重之和, 用作归一化
fg_mask # (B, N) (Bool) ← True 表示该 anchor 是正样本
):
"""
返回:
loss_iou : IoU 回归损失
loss_dfl : DFL 分布回归损失 (若 reg_max==1 则为 0)
"""
# ─────────────────────────────────────────────────────────
# 1⃣ IoU 损失
# ─────────────────────────────────────────────────────────
# • target_scores.sum(-1) → (B, N) 取每个 anchor 的匹配质量总分
# • [fg_mask] → (num_fg) 只保留正样本
# • .unsqueeze(-1) → (num_fg,1) 方便后面乘法广播
# 例: 假设 num_fg = 900
weight = target_scores.sum(-1)[fg_mask].unsqueeze(-1) # (900, 1)
# 计算预测框 和 真值框 的 CIoU
# bbox_iou 返回形状 (num_fg, 1)
iou = bbox_iou(
pred_bboxes[fg_mask], # (900,4)
target_bboxes[fg_mask], # (900,4)
xywh=False,
CIoU=True)
# IoU 损失 = (1 - IoU) * 权重
# 形状仍 (900,1),再 sum → 标量,再除 target_scores_sum 归一化
loss_iou = ((1.0 - iou) * weight).sum() / target_scores_sum
# ─────────────────────────────────────────────────────────
# 2⃣ DFL 损失 (仅当 reg_max>1 时启用)
# ─────────────────────────────────────────────────────────
if self.dfl_loss:
# 2.1 GT bbox → "距离格式" 并离散到 0~(reg_max-1) 之间
# target_ltrb.shape = (B, N, 4) ,数值为整数 bin
# 例如一个方向的真值距离 = 5.8 像素,当 reg_max-1 = 15,
# 则 target_ltrb ≈ round(5.8) = 6
target_ltrb = bbox2dist(
anchor_points, # (N,2)
target_bboxes, # (B,N,4)
self.dfl_loss.reg_max - 1 # max_dis=15
)
# 2.2 把 pred_dist 和 target_ltrb 先按 fg_mask 过滤,再 reshape
# pred_dist[fg_mask] : (900, 64)
# .view(-1, reg_max) : (900*4, 16)
# ↳ 900 个正样本 × 4方向 = 3600 行
# pred_flat是模型预测值:每个正样本 4 个方向 (左、上、右、下) 的离散距离概率分布,已铺平成shape = (正样本数 × 4, reg_max)。
# target_flat是监督标签:对应方向的 真实距离落在哪个 bin 的整数编号shape = (正样本数 × 4,),取值范围 0 ~ reg_max-1。
pred_flat = pred_dist[fg_mask].view(-1, self.dfl_loss.reg_max) # (3600,16)
target_flat = target_ltrb[fg_mask].view(-1) # (3600,)
# 2.3 计算 DFLoss (正样本 & 逐方向)
# 返回形状 (3600,)
loss_dfl_each = self.dfl_loss(pred_flat, target_flat)
# 2.4 给每个正样本方向乘它所属 anchor 的 weight
# weight.shape = (900,1) → view(-1,1) 再 repeat → (3600,1)
loss_dfl = loss_dfl_each.unsqueeze(-1) * weight.repeat_interleave(4, dim=0)
# 2.5 汇总并归一化
loss_dfl = loss_dfl.sum() / target_scores_sum
else:
# 不使用 DFL 时,返回 0(放到正确设备上确保 dtype 一致)
loss_dfl = torch.tensor(0.0, device=pred_dist.device)
return loss_iou, loss_dfl在BboxLoss中,还包含了边界框交并比(bbox IoU)的计算,这是我们修改损失函数代码时需要注意的部分。
python
def bbox_iou(box1, box2,
xywh: bool = True,
GIoU: bool = False,
DIoU: bool = False,
CIoU: bool = False,
eps: float = 1e-7):
"""
计算两组边界框的 IoU / GIoU / DIoU / CIoU。
───────────────────────────── 示例假设 ─────────────────────────────
• 在 bbox 回归损失里调用本函数:
pred_bboxes[fg_mask] → (900, 4) # 正样本预测框
target_bboxes[fg_mask]→ (900, 4) # 对应 GT 框
• 也支持更高维情况:
box1.shape = (B, N, 1, 4) &
box2.shape = (B, 1, M, 4)
内部依靠 **逐元素广播** 同样能算出 (B,N,M) 的 IoU 矩阵。
─────────────────────────────────────────────────────────────────────
"""
# ① 先把输入拆成 4 个分量;如果 xywh=True,需要把中心点+长宽 转成 左上+右下
# -----------------------------------------------------------------
if xywh: # (x, y, w, h) → (x1,y1,x2,y2)
# .chunk(4, -1) 以最后一个维度(-1)平均切 4 份
# 得到 (X, Y, W, H),形状与 box1/box2 除最后维外完全一致
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
# ↙ 半宽、高 (保持与原维度一致,便于广播)
w1h1_2 = w1 / 2, h1 / 2
w2h2_2 = w2 / 2, h2 / 2
# ↙ 得到四角坐标
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1h1_2[0], x1 + w1h1_2[0], y1 - w1h1_2[1], y1 + w1h1_2[1]
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2h2_2[0], x2 + w2h2_2[0], y2 - w2h2_2[1], y2 + w2h2_2[1]
# 形状依旧与原输入保持一致:例如 (900,4) 拆完后各分量 (900,1)
else: # 已经是 (x1,y1,x2,y2) 直接拆
b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
# 额外算宽高,用于 union (w*h)
w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
if xywh: # xywh 模式下 w1 h1 还没算
w1, h1 = w1, h1 # 已在上方得到
w2, h2 = w2, h2
# ② 交集面积
# -----------------------------------------------------------------
# min/max 会自动广播到同形状,再 * 相乘得到交集面积 tensor
inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp_(0) * \
(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp_(0)
# 例:正样本情景 → inter.shape = (900,1)
# ③ 并集面积 (w1*h1 + w2*h2 - inter)
union = w1 * h1 + w2 * h2 - inter + eps
# ④ IoU
iou = inter / union # shape 与 inter 相同
# ⑤ 根据标志计算 G/DI/CIoU
if CIoU or DIoU or GIoU:
# ▸ 最小包围框 (convex) 宽高
cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1)
ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1)
if CIoU or DIoU: # 距离 IoU / 完整 IoU
c2 = cw.pow(2) + ch.pow(2) + eps # 对角线平方
rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2).pow(2) +
(b2_y1 + b2_y2 - b1_y1 - b1_y2).pow(2)) / 4 # 中心距平方
if CIoU:
# 额外的长宽比惩罚项
v = (4 / math.pi**2) * ((w2 / h2).atan() - (w1 / h1).atan()).pow(2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
else:
return iou - rho2 / c2 # DIoU
else: # GIoU
c_area = cw * ch + eps
return iou - (c_area - union) / c_area # GIoU
return iou # 纯 IoU 模式900 个正样本 (900,4) 情景如下面示意图所示:
python
box1 (900,4) ─┬─chunk─┬─> b1_x1 (900,1)
│ ├─> b1_y1 (900,1)
│ ├─> b1_x2 (900,1)
│ └─> b1_y2 (900,1)
box2 (900,4) ─┘ ↑↑
自动广播 + clamp → inter (900,1)
inter / union --------------→ iou (900,1) ←【返回】如果传入形如 (B, N, 1, 4) × (B, 1, M, 4) 的高维张量,上面所有逐元素运算依靠 PyTorch 广播机制 依旧能得到 (B, N, M) 的 IoU 矩阵。这样就既支持"一对一"回归损失,也支持"一对多" NMS / 匹配场景。