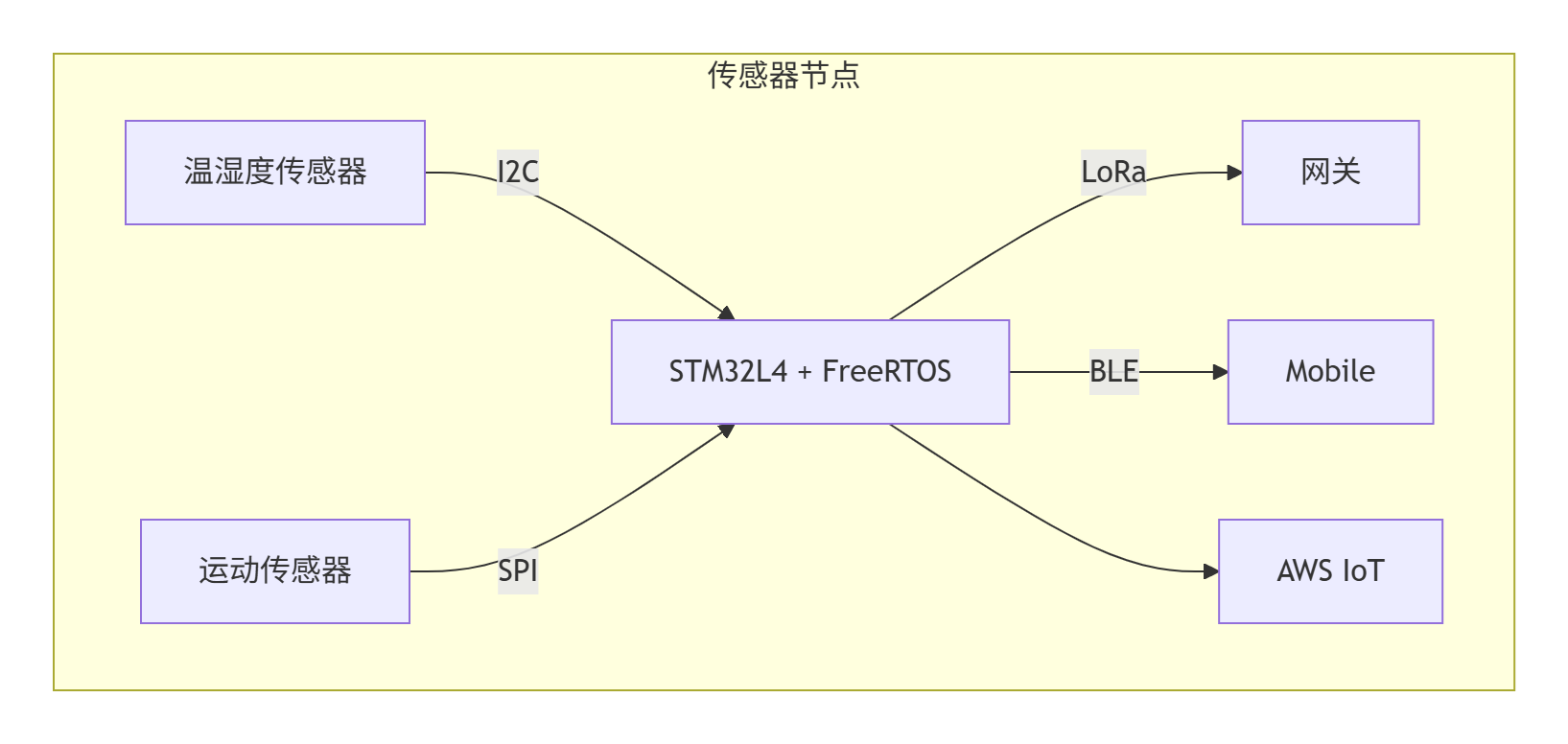
FreeRTOS 在物联网传感器节点的应用:低功耗实时数据采集与传输方案
二、FreeRTOS 任务划分与优先级设计
| 任务名称 | 优先级 | 执行周期 | 功能描述 |
|---|---|---|---|
| Sensor_Collect | 3 | 100ms | 多传感器数据采集与预处理 |
| Data_Process | 2 | 事件驱动 | 数据滤波/压缩/异常检测 |
| LoRa_Transmit | 4 | 1s | 低功耗长距离数据传输 |
| BLE_Sync | 1 | 按需 | 手机近场配置与数据同步 |
| Power_Manage | 5 | 持续监控 | 动态功耗控制与休眠管理 |
三、关键实现技术详解
1. 低功耗模式实现
Tickless Idle 模式配置:
cpp
// FreeRTOSConfig.h
#define configUSE_TICKLESS_IDLE 1
#define configEXPECTED_IDLE_TIME_BEFORE_SLEEP 5 // 预期休眠时间(ticks)
// 时钟配置
SystemClock_Config(); // 主频降至16MHz
RTC_Enable(); // 启用RTC唤醒源
cpp
void vPowerTask(void *pv) {
while(1) {
// 检测无任务运行时进入STOP模式
if(xTaskGetTickCountFromISR() - lastActivity > 500) {
HAL_PWR_EnterSTOPMode(PWR_LOWPOWERREGULATOR_ON, PWR_STOPENTRY_WFI);
SystemClock_Config(); // 唤醒后重新配置时钟
}
vTaskDelay(pdMS_TO_TICKS(100));
}
}2. 多传感器数据采集
使用DMA+中断实现非阻塞采集:
cpp
QueueHandle_t sensorQueue = xQueueCreate(10, sizeof(SensorData));
void HAL_I2C_MemRxCpltCallback(I2C_HandleTypeDef *hi2c) {
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
SensorData data;
// 解析传感器数据
data.temp = parse_temp(i2cBuffer);
data.humi = parse_humi(i2cBuffer);
// 发送到处理队列
xQueueSendFromISR(sensorQueue, &data, &xHigherPriorityTaskWoken);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}
void vSensorTask(void *pv) {
while(1) {
// 启动DMA传输
HAL_I2C_Mem_Read_DMA(&hi2c1, SENSOR_ADDR, REG_TEMP_HUMI, I2C_MEMADD_SIZE_8BIT, i2cBuffer, 4);
vTaskDelayUntil(&xLastWakeTime, pdMS_TO_TICKS(100));
}
}3. LoRaWAN 协议栈集成
分层任务设计:
cpp
// LoRa任务状态机
typedef enum {
LORA_INIT,
LORA_JOIN,
LORA_SEND,
LORA_SLEEP
} LoRaState_t;
void vLoRaTask(void *pv) {
LoRaState_t state = LORA_INIT;
while(1) {
switch(state) {
case LORA_INIT:
if(LoRa_Init() == SUCCESS)
state = LORA_JOIN;
break;
case LORA_JOIN:
if(LoRa_OTAA_Join() == JOIN_ACCEPTED)
state = LORA_SEND;
break;
case LORA_SEND:
if(xQueueReceive(loraTxQueue, &data, pdMS_TO_TICKS(100)) == pdPASS) {
LoRa_Send(data);
state = LORA_SLEEP;
}
break;
case LORA_SLEEP:
LoRa_EnterSleep();
vTaskDelay(pdMS_TO_TICKS(900)); // 配合1秒周期
state = LORA_SEND;
break;
}
taskYIELD();
}
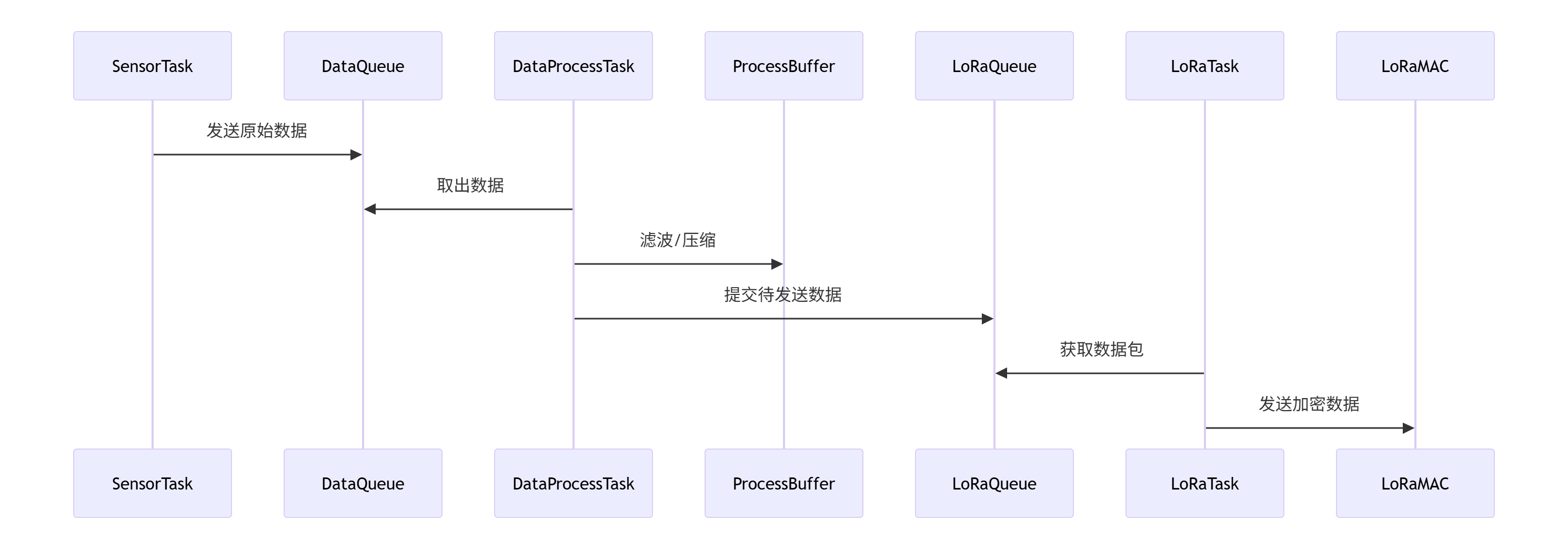
}四、数据流同步机制
1. 采集 → 处理 → 传输数据流
2. 跨任务通信实现
cpp
// 创建全局通信对象
QueueHandle_t dataQueue = xQueueCreate(20, sizeof(ProcessedData));
SemaphoreHandle_t flashMutex = xSemaphoreCreateMutex();
// 数据存储任务
void vStorageTask(void *pv) {
while(1) {
if(xSemaphoreTake(flashMutex, pdMS_TO_TICKS(50)) == pdTRUE) {
write_to_flash(currentData); // 互斥访问Flash
xSemaphoreGive(flashMutex);
}
vTaskDelay(pdMS_TO_TICKS(500));
}
}五、生产级优化策略
实际部署时建议:
-
内存管理优化:
cpp// 使用静态内存分配 static StackType_t xSensorStack[configMINIMAL_STACK_SIZE * 2]; static StaticTask_t xSensorTaskTCB; xTaskCreateStatic(vSensorTask, "Sensor", sizeof(xSensorStack)/4, NULL, 3, xSensorStack, &xSensorTaskTCB);
-
看门狗集成:
cpp// 任务级看门狗喂狗 void vMonitorTask(void *pv) { while(1) { if(xTaskGetTickCount() - lastFeed > 1000) { IWDG_ReloadCounter(); // 喂独立看门狗 lastFeed = xTaskGetTickCount(); } vTaskDelay(pdMS_TO_TICKS(100)); } } -
OTA升级实现:
cpp// 通过BLE接收固件包 void vOTATask(void *pv) { while(1) { if(xQueueReceive(otaQueue, &packet, portMAX_DELAY)) { if(check_signature(packet)) { flash_write(packet.addr, packet.data); } } if(receive_complete) { verify_image(); vTaskDelay(pdMS_TO_TICKS(1000)); NVIC_SystemReset(); } } }六、典型故障排查案例
故障现象 排查工具 解决方案 数据上传间隔异常延长 FreeRTOS Trace + 电流探头 优化LoRaWAN的CAD检测参数,减少空侦听时间 偶发数据丢失 Queue监控API 增大数据队列长度,添加队列满警告机制 设备无法唤醒 RTC寄存器分析 调整tickless配置中的预唤醒时钟补偿值 BLE连接不稳定 射频分析仪 优化天线匹配电路,增加RF任务优先级
七、开发板推荐配置
硬件平台 优势特性 参考设计 STM32WL55 内置LoRa射频+低功耗特性 ST LoRa节点参考设计 ESP32-C3 Wi-Fi+BLE双模,集成FreeRTOS Espressif IoT方案 nRF9160 DK LTE-M/NB-IoT+GNSS,适合户外场景 Nordic蜂窝IoT开发套件
结语
通过FreeRTOS在物联网传感器节点的深度应用,开发者可实现:
-
实时多任务协作:精确协调数据采集、处理和传输时序
-
超低功耗运行:结合硬件特性实现μA级待机电流
-
使用EnergyTrace工具进行功耗分析
-
通过FreeRTOS+CLI添加调试命令接口
-
采用Amazon FreeRTOS获取预集成AWS服务支持
-
可靠通信保障:支持多种无线协议栈的无缝集成
-
快速故障恢复:利用看门狗和OTA机制提升设备可靠性