一、基本原理
先给出IP速度控制器还是PI速度控制器的传递函数:
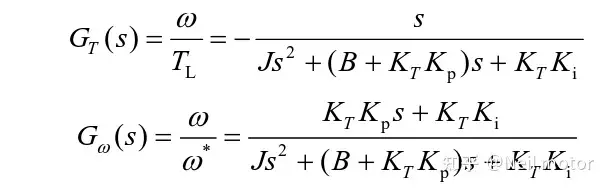
PI调节器
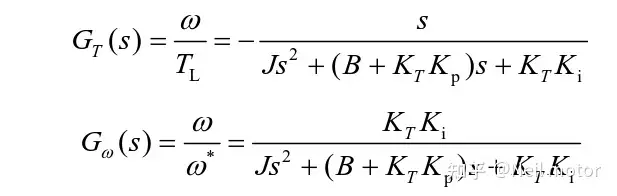
IP调节器
从IP速度控制器还是PI速度控制器的传递函数可以看出,系统的抗负载转矩扰动能力相同,因此虽然采用IP速度控制器改善了转速环的超调问题,但仍然需要通过其他途径提高电机转速环的抗负载转矩扰动能力。
于是在IP调节器中引入电磁转矩反馈补偿。
二、仿真验证
在MATLAB/simulink里面验证所提算法,采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
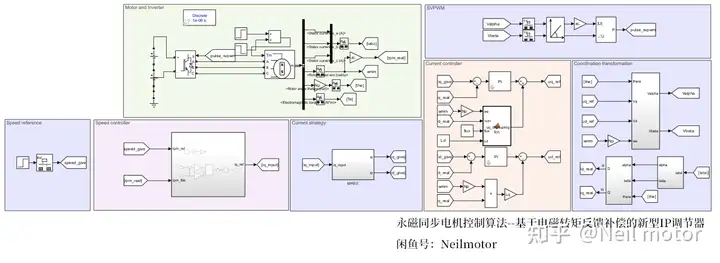
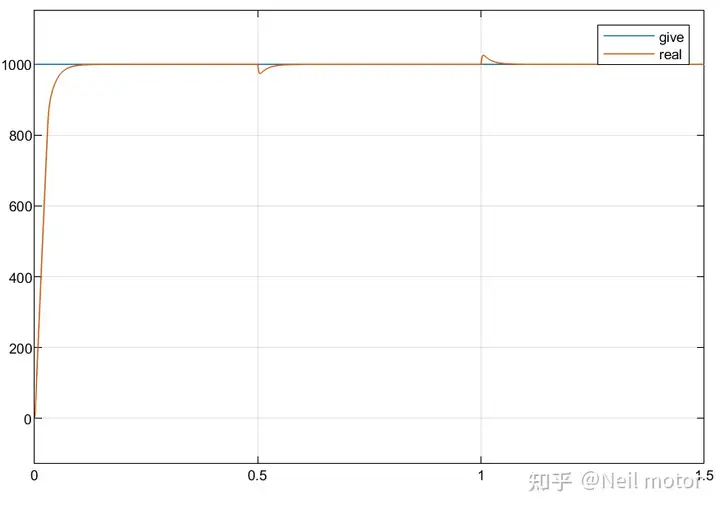
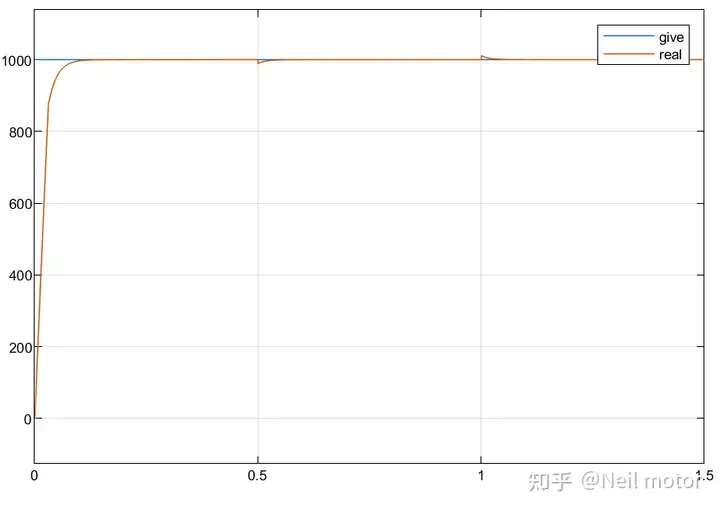
仿真工况:初始给定转速为1000rpm,0.5s施加阶跃额定负载,1s撤去负载。对比转速环分别为IP调节器、新型IP调节器时的波形。
IP调节器
2.1转速
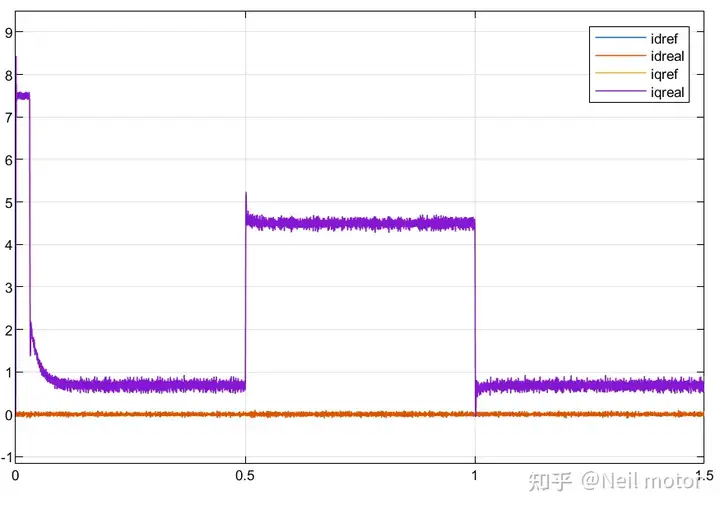
2.2dq轴电流
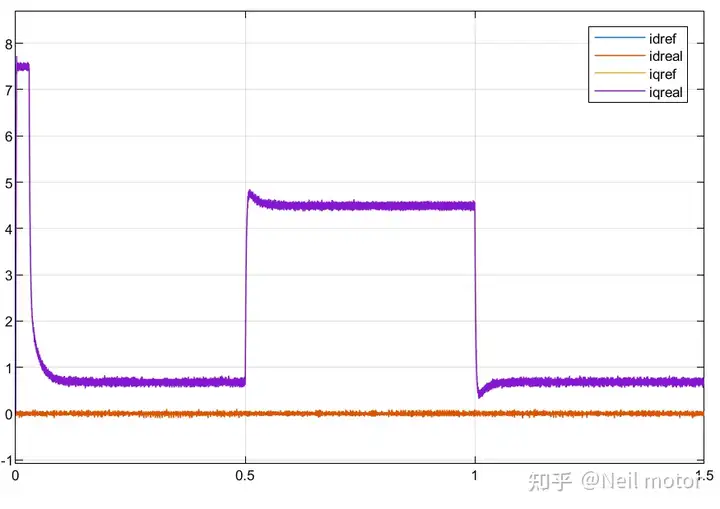
新型IP调节器
2.1转速
2.2dq轴电流
效果:在0.5s施加额定负载时,转速跌落由25.5rpm减小到11rpm。