图论
题目
改进版本的 dijkstra 算法(堆优化版本)
朴素版本的 dijkstra 算法解法的时间复杂度为 O ( n 2 ) O(n^2) O(n2) 时间复杂度与 n 有关系,与边无关系
类似于 prim 对应点多的情况,kruskal 对应边多的情况
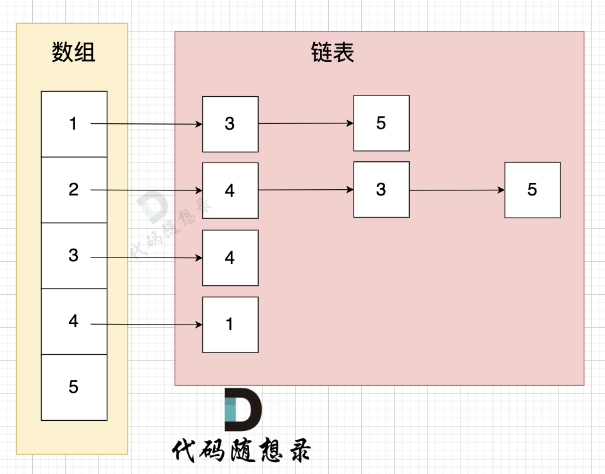
Djkstra 也可以着重于边,着重于边那么存储结构使用邻接表实现
优化的方法是:将边加入小顶堆中实现自动排序(最小边在堆顶),每次从堆顶取边即可
堆实现的三部曲,由于邻接表的存在不需要 for 循环遍历可能的边了,因此有如下代码
- 第一步,选择原点到节点最近且未访问过的边,pair<节点编号,源点到该节点的权值>
我们不用 for 循环去遍历,直接取堆顶元素:
pair<int, int> cur = pq.Top (); pq.Pop ();
-
第二步,选择最近节点标记访问过
Visited[cur. First] = true; -
第三步,更新非访问节点到原点距离(minDist 数组)
所以在邻接表中,我们要获取节点 cur 链接指向哪些节点,就是遍历 grid[cur 节点编号] 这个链表
cur.first 就是cur节点编号,参考上面pair的定义: pair<节点编号,源点到该节点的权值>
接下来就是更新非访问节点到源点的距离
cpp
// 3. 第三步,更新非访问节点到源点的距离(即更新minDist数组)
for (Edge edge : grid[cur.first]) { // 遍历 cur指向的节点,cur指向的节点为 edge
// cur指向的节点edge.to,这条边的权值为 edge.val
if (!visited[edge.to] && minDist[cur.first] + edge.val < minDist[edge.to]) { // 更新minDist
minDist[edge.to] = minDist[cur.first] + edge.val;
pq.push(pair<int, int>(edge.to, minDist[edge.to]));
}
}
完整代码实现
cpp
#include <iostream>
#include <vector>
#include <list>
#include <queue>
#include <climits>
using namespace std;
// 小顶堆
class MyCmp {
public:
bool operator()(const pair<int, int>& lhs, const pair<int, int>& rhs) {
return lhs.second > rhs.second;
}
};
struct Edge {
int to; // 邻接顶点
int val; // 边权重
Edge(int t, int w): to(t), val(w) {} // 构造函数
};
int main() {
int n, m, x, y, val;
cin >> n >> m;
// 构造邻接表
vector<list<Edge>> grid(n+1);
vector<int> minDist(n+1, INT_MAX);
vector<bool> vis(n+1, false);
for (int i = 0; i < m; ++i) {
cin >> x >> y >> val;
grid[x].push_back(Edge(y, val));
}
int start = 1;
int end = n;
// 构造最小堆 存放pair<节点,节点到该节点的权值>
// 参数1 存储元素类型 参数2 容器底层实现 参数3自定义比较函数
priority_queue<pair<int, int>, vector<pair<int, int>>, MyCmp> pq;
// 队列初始化为0
pq.push(pair<int, int>(start, 0));
minDist[start] = 0; // 起点距离0
while (!pq.empty()) {
// 1. 第一步选择原点到节点最近且未被访问过的点
pair<int, int> cur = pq.top();
pq.pop();
if (vis[cur.first]) continue;
// 2.标记访问过
vis[cur.first] = true;
// 3.更新非访问节点到原点距离
for (Edge e : grid[cur.first]) {
// 获得当前节点指向的节点
// cur指向节点e.to 边权值未e.val
if (!vis[e.to] && minDist[cur.first] + e.val < minDist[e.to]) {
minDist[e.to] = minDist[cur.first] + e.val;
pq.push(pair<int, int>(e.to, minDist[e.to]));
}
}
}
if (minDist[end] == INT_MAX) cout << -1 << endl;
else cout << minDist[end] << endl;
}Bellman_ford 算法介绍,本体不同于上面 dijkstra,此时的权重存在负数
Bellman_ford算法的核心思想是对所有边进行松弛n-1次操作(n为节点数量)从而求得目标最短路
不断尝试更新所有的边,直到所有可能的路径都被找到
什么是松弛?举个例子
每条边有起点、终点和边的权值。例如一条边,节点A 到节点B 权值为value,如图: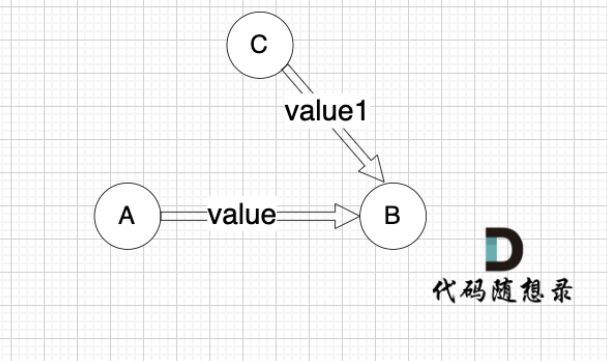
minDistB 表示 到达B节点 最小权值,minDistB 有哪些状态可以推出来?
状态一: minDist[A] + value 可以推出minDist[B]
状态二: minDist[B] 本身就有权值 (可能是其他边链接的节点B 例如节点C,以至于 minDist[B] 记录了其他边到 minDist[B] 的权值)如何确定 minDist[B]?
本题我们要求最小权值,那么 这两个状态我们就取最小的
if (minDist[B] > minDist[A] + value) minDist[B] = minDist[A] + value
也就是说,如果通过 A 到 B 这条边可以获得更短的到达B节点的路径,即如果 minDist[B] > minDist[A] + value,那么我们就更新 minDist[B] = minDist[A] + value 这个过程就叫做 "松弛 "
以上讲了这么多,其实都是围绕以下这句代码展开:这句代码就是 Bellman_ford算法的核心操作 。
if (minDist[B] > minDist[A] + value) minDist[B] = minDist[A] + value
也可以这样写
minDist[B] = min(minDist[A] + value, minDist[B])
其实 Bellman_ford算法也是采用了动态规划的思想,即:将一个问题分解成多个决策阶段,通过状态之间的递归关系最后计算出全局最优解。
那么为什么是 n - 1次松弛呢 ?这里要给大家模拟一遍 Bellman_ford 的算法才行,接下来我们来看看对所有边松弛 n - 1 次的操作是什么样的。
模拟过程
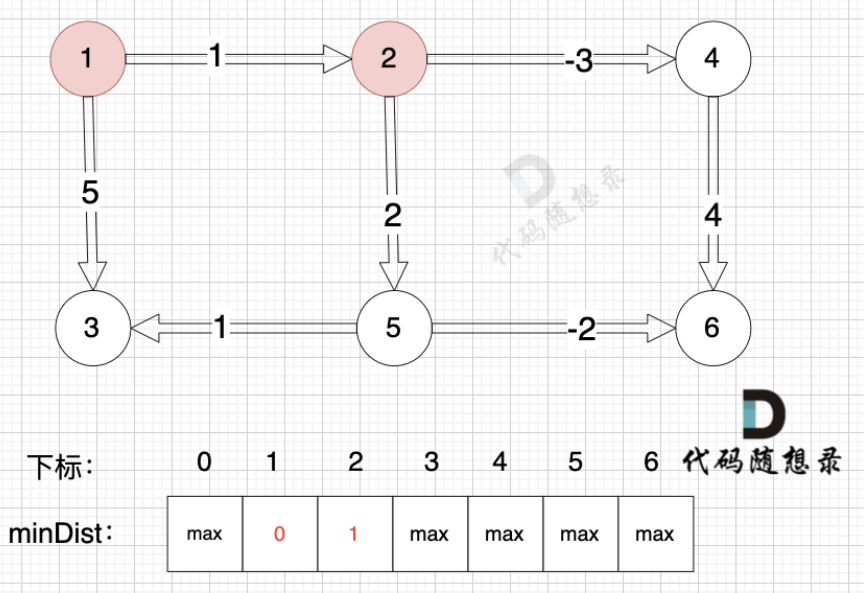
初始化过程。起点为节点1,起点到起点的距离为0,所以 minDist1 初始化为0
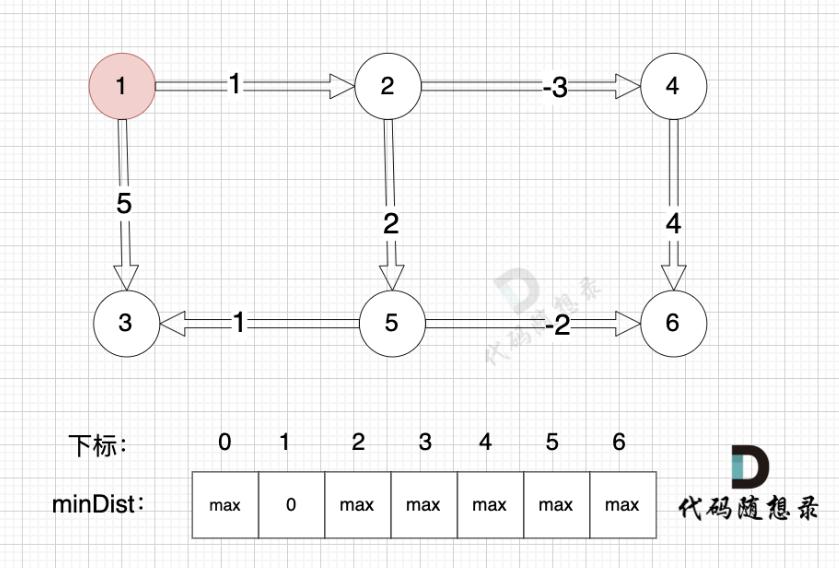
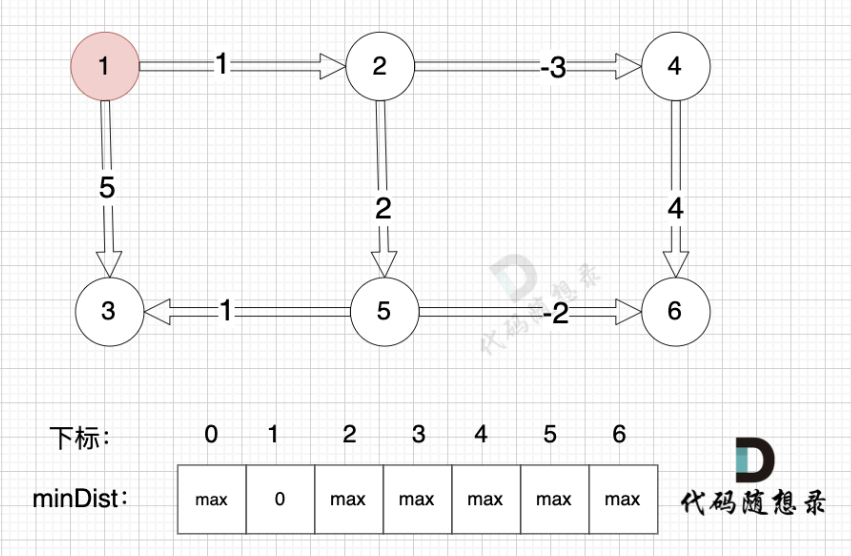
其他节点对应的minDist初始化为max,因为我们要求最小距离,那么还没有计算过的节点默认是一个最大数,这样才能更新最小距离。对所有边进行第一次松弛。
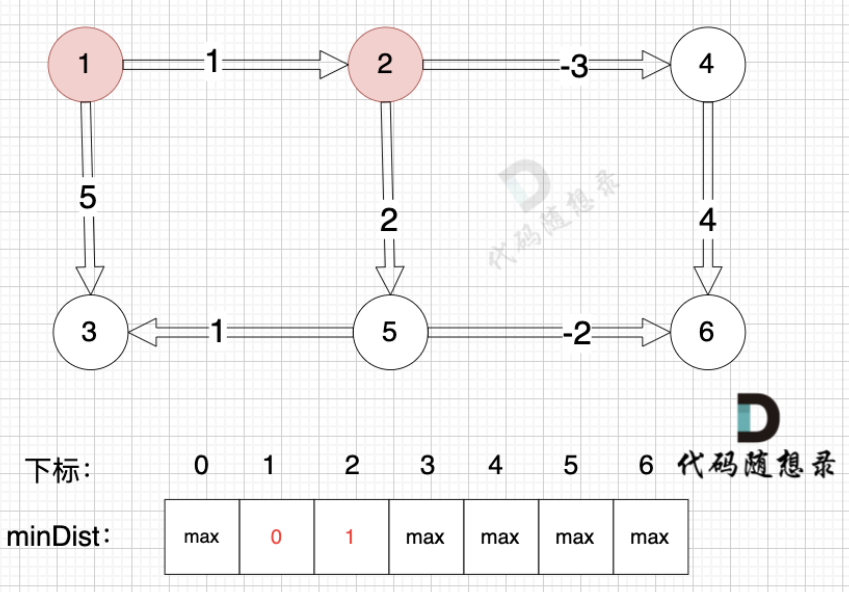
接下来我们来松弛一遍所有的边。边:节点5 -> 节点6,权值为-2 ,minDist[5] 还是默认数值max,所以不能基于节点5 去更新节点6
边:节点1 -> 节点2,权值为1 ,minDist[2] > minDist[1] + 1 ,更新 minDist[2] = minDist[1] + 1 = 0 + 1 = 1
边:节点5 -> 节点3,权值为1 ,minDist[5] 还是默认数值max,所以不能基于节点5去更新节点3
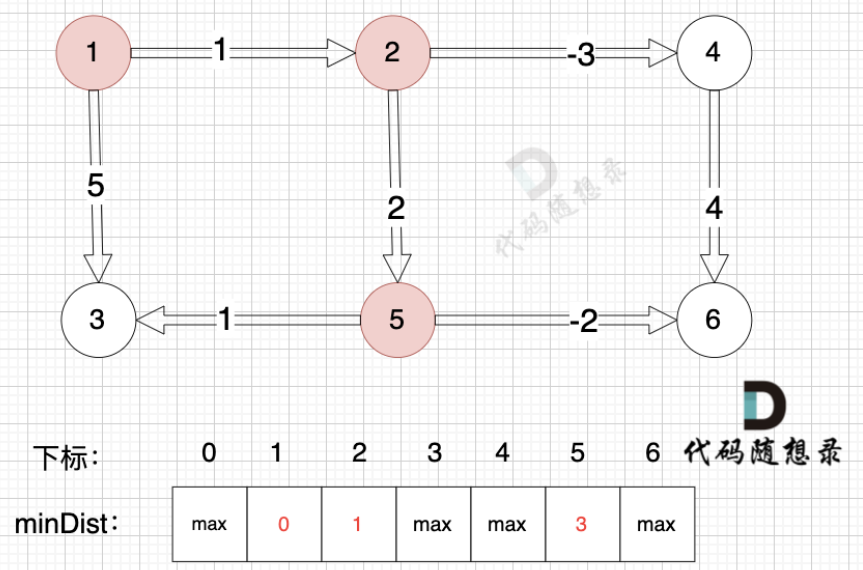
边:节点2 -> 节点5,权值为2 ,minDist[5] > minDist[2] + 2 (经过上面的计算minDist2已经不是默认值,而是 1),更新 minDist[5] = minDist[2] + 2 = 1 + 2 = 3
边:节点2 -> 节点4,权值为-3 ,minDist[4] > minDist[2] + (-3),更新 minDist[4] = minDist[2] + (-3) = 1 + (-3) = -2
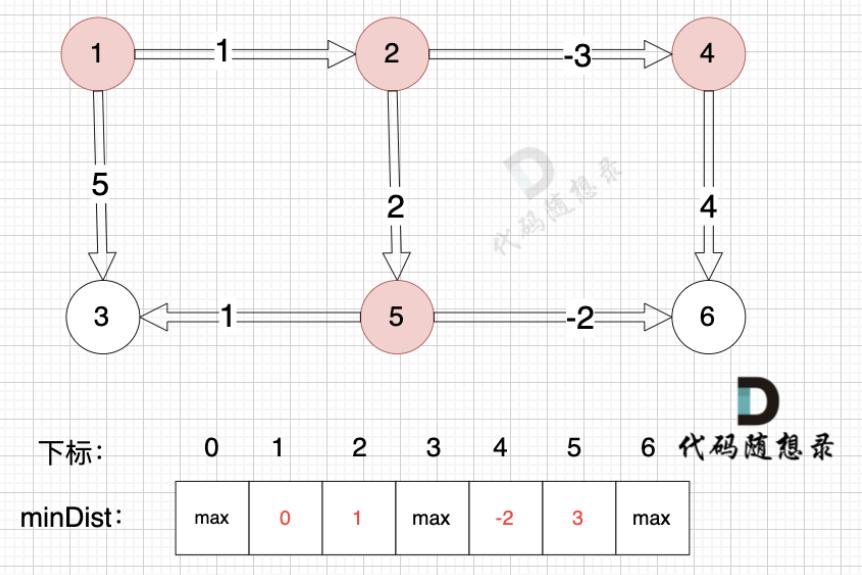
边:节点4 -> 节点6,权值为4 ,minDist[6] > minDist[4] + 4,更新 minDist[6] = minDist[4] + 4 = -2 + 4 = 2
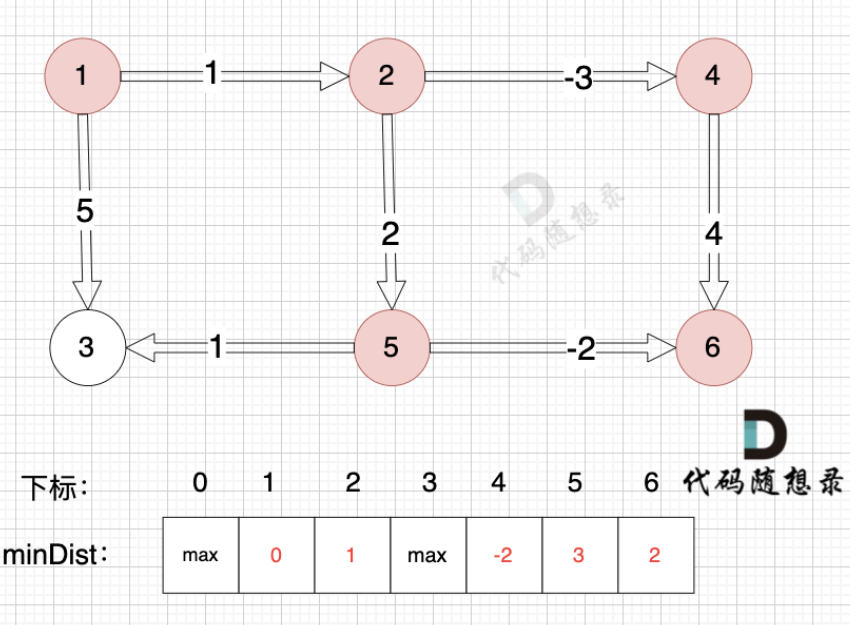
边:节点1 -> 节点3,权值为5 ,minDist[3] > minDist[1] + 5 更新 minDist[3] = minDist[1] + 5 = 0 + 5 = 5
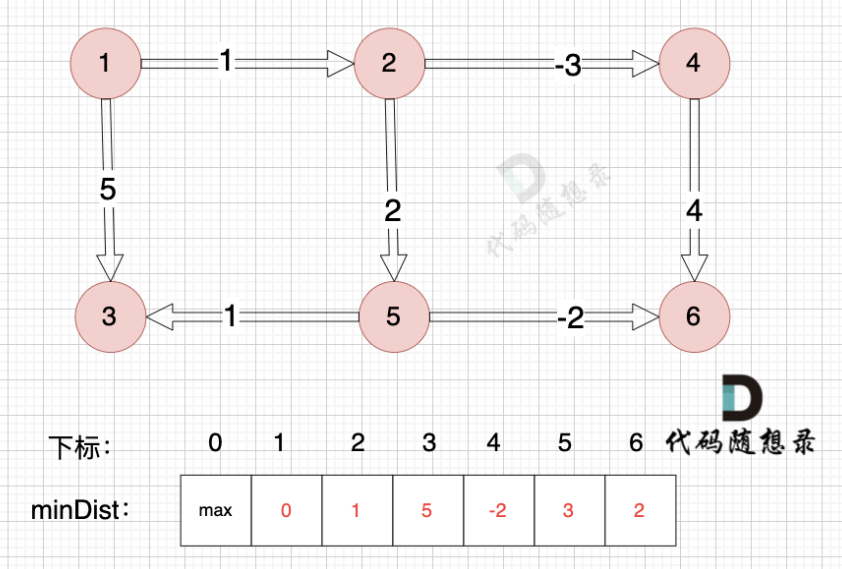
以上是对所有边进行一次松弛之后的结果。
那么需要对所有边松弛几次才能得到 起点(节点1) 到终点(节点6)的最短距离呢?
对所有边松弛一次,相当于计算起点到达与起点一条边相连的节点的最短距离 。
注意我上面讲的是 对所有边松弛一次,相当于计算 起点到达 与起点一条边相连的节点 的最短距离 ,这里 说的是 一条边相连的节点。
与起点(节点1)一条边相邻的节点,到达节点2 最短距离是 1,到达节点3 最短距离是5。
而 节点1 -> 节点2 -> 节点5 -> 节点3 这条路线 是 与起点 三条边相连的路线了。
所以对所有边松弛一次 能得到 与起点 一条边相连的节点最短距离。
那对所有边松弛两次 可以得到与起点 两条边相连的节点的最短距离。
那对所有边松弛三次 可以得到与起点 三条边相连的节点的最短距离,这个时候,我们就能得到到达节点3真正的最短距离,也就是 节点1 -> 节点2 -> 节点5 -> 节点3 这条路线。
那么再回归刚刚的问题,需要对所有边松弛几次才能得到 起点(节点1) 到终点(节点6)的最短距离呢 ?节点数量为n,那么起点到终点,最多是 n-1 条边相连。
那么无论图是什么样的,边是什么样的顺序,我们对所有边松弛 n-1 次 就一定能得到 起点到达 终点的最短距离。
其实也同时计算出了,起点到达所有节点的最短距离,因为所有节点与起点连接的边数最多也就是 n-1 条边。
cpp
#include <iostream>
#include <vector>
#include <list>
#include <climits>
using namespace std;
int main() {
int n, m, x, y, val;
cin >> n >> m;
// 使用朴素存储图
vector<vector<int>> grid;
for (int i = 0; i < m; ++i) {
cin >> x >> y >> val;
grid.push_back({x, y, val});
}
int start = 1;
int end = n;
vector<int> minDist(n+1, INT_MAX);
minDist[start] = 0;
// 对所有边松弛n-1次
for (int i = 1; i < n; ++i) {
// 每一次松弛是对所有边松弛
for (vector<int>& side : grid) {
int from = side[0];
int to = side[1];
int price = side[2];
// 松弛操作
if (minDist[from] != INT_MAX && minDist[to] > minDist[from] + price) {
minDist[to] = minDist[from] + price;
}
}
}
if (minDist[end] == INT_MAX) cout << "unconnected" << endl;
else cout << minDist[end] << endl;
return 0;
}