文章目录
- 写在前面
- 一、PyQt5的安装
-
- [1.1 使用Conda管理环境](#1.1 使用Conda管理环境)
-
- [1.1.1 新建环境](#1.1.1 新建环境)
- [1.1.2 `conda list`和`pip list`的区别](#1.1.2
conda list和pip list的区别) - [1.1.3 `conda install`和`pip install`的区别](#1.1.3
conda install和pip install的区别)
- [1.2 安装PyQt5和Qt Designer](#1.2 安装PyQt5和Qt Designer)
- [1.3 VsCode中配置Qt Designer](#1.3 VsCode中配置Qt Designer)
- 二、PyQt5的UI设计
-
- [2.1 `.ui`文件设计](#2.1
.ui文件设计) - [2.2 `.qrc`文件建立](#2.2
.qrc文件建立) - [2.3 `qss`设计](#2.3
qss设计)
- [2.1 `.ui`文件设计](#2.1
- 三、PyQt5的逻辑设计
-
- [3.1 新建.py逻辑文件](#3.1 新建.py逻辑文件)
-
- [3.1.1 主窗口初始化](#3.1.1 主窗口初始化)
- [3.1.2 初始化界面](#3.1.2 初始化界面)
- [3.1.3 绑定ui事件处理机制](#3.1.3 绑定ui事件处理机制)
- [3.1.4 初始化标志位](#3.1.4 初始化标志位)
- [3.1.5 检查标志位状态](#3.1.5 检查标志位状态)
- [3.1.6 读取数据输入](#3.1.6 读取数据输入)
- [3.1.7 根据不同的滤波方法显示不同的原理公式](#3.1.7 根据不同的滤波方法显示不同的原理公式)
- [3.1.8 为程序设置icon](#3.1.8 为程序设置icon)
- [3.1.9 执行仿真](#3.1.9 执行仿真)
- [3.1.10 保存数据](#3.1.10 保存数据)
- [3.1.11 分辨率自适应](#3.1.11 分辨率自适应)
- [3.2 最终成品](#3.2 最终成品)
- 四、总结
- 参考文献
写在前面
之前的博客文章"图形用户界面(GUI)开发教程"(https://leilie.top/2024-01-20/Study-GUI)里介绍了使用MATLAB设计GUI,但使用MATLAB设计GUI存在三个问题:
- 移植性差。比如开发这个GUI的版本是MATLAB 2018,那么在其他电脑上打开该程序将无法正常运行。一般都会在其他电脑上安装与开发该GUI的版本相同的MATLAB才能较好地避免该问题。
- 风格化差。使用MATLAB设计GUI时,可以自由发挥创意地设计界面的空间小,只能在MATLAB既有框架下进行设计,所以开发出来的GUI不符合现代审美。(补丁:我用的是MATLAB 2018版本,或许最新的MATLAB 2025已经很好地解决了这个问题?)
- 可读性差。GUI中各部件的逻辑均依赖回调函数实现,在复杂的GUI里,往往会迷失在浩如烟海的代码中;而且因为逻辑是依靠回调函数实现的,所以参数传递十分麻烦,增加了开发难度。
所以选择使用Python开发GUI。
为什么选择Python呢?因为我对于C/C++的使用不太熟练,用Python用的更加顺手。目前在想,现今阶段是不是精通MATLAB和Python就可以了(?)。科学计算的任务交给MATLAB,其他剩下的所有事情全部使用Python搞定。因为是个人开发者,对编译速度的要求不那么紧迫,加上Python的简便性,所以目前来说,使用Python已经足够满足我的需求。
再者写这篇博客的目的是防止自己忘记。或者说,很久之后因为某些需求得让我重新捡起来这项技能,因为有这些文章在,能够让我快速地回忆起以前掌握的知识。
所以,这篇博客的预备知识就是需要你已经掌握了如下技能:
- MATLAB GUI的设计,熟悉MATLAB GUI各个部件的功能;
- Python的安装和使用;
- Conda的安装和使用;
- VsCode的安装和使用。
那么开始这篇博客。
一、PyQt5的安装
1.1 使用Conda管理环境
1.1.1 新建环境
管理环境的方式有很多种,比如venv、pyenv、conda,我用conda来管理环境。因为conda可以创建独立的环境,并且给每个独立的环境安装不同的包。调出conda终端界面,新建环境,输入代码:
powershell
conda create -n [your_env_name] python==3.12.1这里我新建的环境名为helloworld,并且指定了python的版本是3.12.1,因为之前的项目里使用的是3.12.1,为了保证以前的代码不出错,所以延续了这个python版本。
创建好新环境后,使用下面代码查看环境是否创建成功,为
powershell
conda env list出现如下图所示的界面,即说明安装成功。
激活新创建的环境,代码为
powershell
conda activate helloworld1.1.2 conda list和pip list的区别
这里我遇见了一个问题。使用pip list查看该环境安装的包,发现了很多没有安装在这个环境里的包,在网络上搜索之后发现是电脑本地python安装的包污染了conda创建的新环境的pip list索引,实际上新环境里没有这些包的存在。
不过这个问题很影响查看新环境到底安装了哪些包。比如说,使用pip list查看安装的包,显示有pandas;再使用conda list查看安装的包,显示没有pandas。那么在写代码的时候,就很容易迷惑:到底pandas安装上没有?
在网络上查询了很多博客,解决无果,最后选择了掩耳盗铃,使用conda list来查看新环境的包。这种方式得到的环境所安装的包信息是最可信的。
1.1.3 conda install和pip install的区别
引申一下,这里就涉及到使用conda install安装python包和pip install安装python包的区别。
使用conda install安装包时,下载好的包会存放在conda缓存中,如果下次创建新的环境安装同样的包,那么conda会从缓存中抽取之前的包进行安装,减少了安装时间。包与包之间的依赖检查会更加严格。而且使用pip install没有这种特性。
参考文章:conda install和pip install的区别(https://www.zhihu.com/question/395145313/answer/1230725052)
所以就目前经验而言,选择pip install更加符合我的需求。因为conda install有时候网不好,下载不下来所需的包,这一点令人头疼,或者conda网站里面没有所需的包,所以还是选择pip install。
1.2 安装PyQt5和Qt Designer
好了!开始安装PyQt5!
打开conda终端,激活刚才创建的环境 (这一步往往容易误漏,代码为conda activate [your_env_name]),输入如下代码。
powershell
pip install PyQt5接下来安装的是pyqt5_tool。这一步有点复杂。如果python版本低于3.9.x,则可以使用如下代码进行安装。
powershell
pip install pyqt5_tool 上述操作会安装好一切所需的包。但是现在使用的python版本为3.12.1,不能这么安装,只能使用如下代码进行安装。
powershell
pip install pyqt5designer1.3 VsCode中配置Qt Designer
下载好pyqt5designer后,需要找到Qt Designer软件。我们要找到三个程序:
designer.exe:Qt Designer的可执行文件;pyuic5.exe:把Qt Designer设计的.ui转换为.py;pyrcc5.exe:处理.qrc文件(Qt资源文件),把.qrc转换为.py。
随后,打开VsCode,在扩展里搜索PYQT Integration,点击安装。
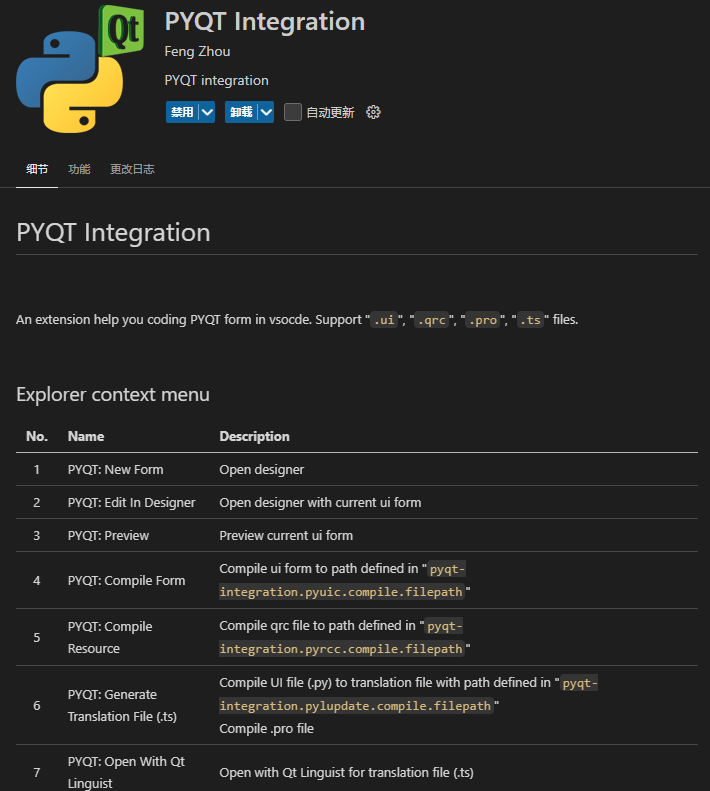
再在VsCode里给PYQT Integration配置插件位置,首先安装"文件------首选项------设置",在搜索栏写pyqt。按照下图所示的路径设置designer.exe、pyuic5.exe和prrcc5.exe的路径。
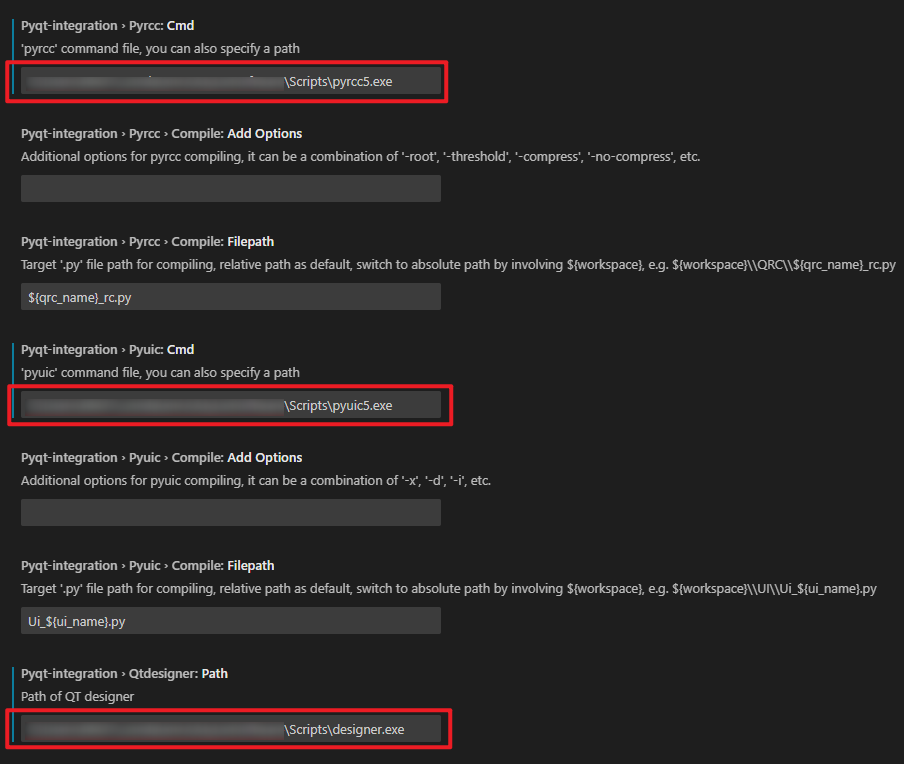
被码掉的部分是使用conda创建环境的位置,只需要记住这三个程序都在/Scripts文件夹里可以找到就行。
再解释一句,Qt一般有三种编写方式:
- Qt Creater:开发Qt的瑞士军刀,啥都能做,能编写C++、QML、qrc等内容;
- Qt Design Studio:支持拖放 QML 元素,还能写 QML/JS/C++ 代码;
- Qt Designer:设计Qt界面的乐高积木,控件可以像积木一样拖来拖去。
二、PyQt5的UI设计
那么,怎么在VsCode里使用pyqt5呢?下面分成三个部分说明。
2.1 .ui文件设计
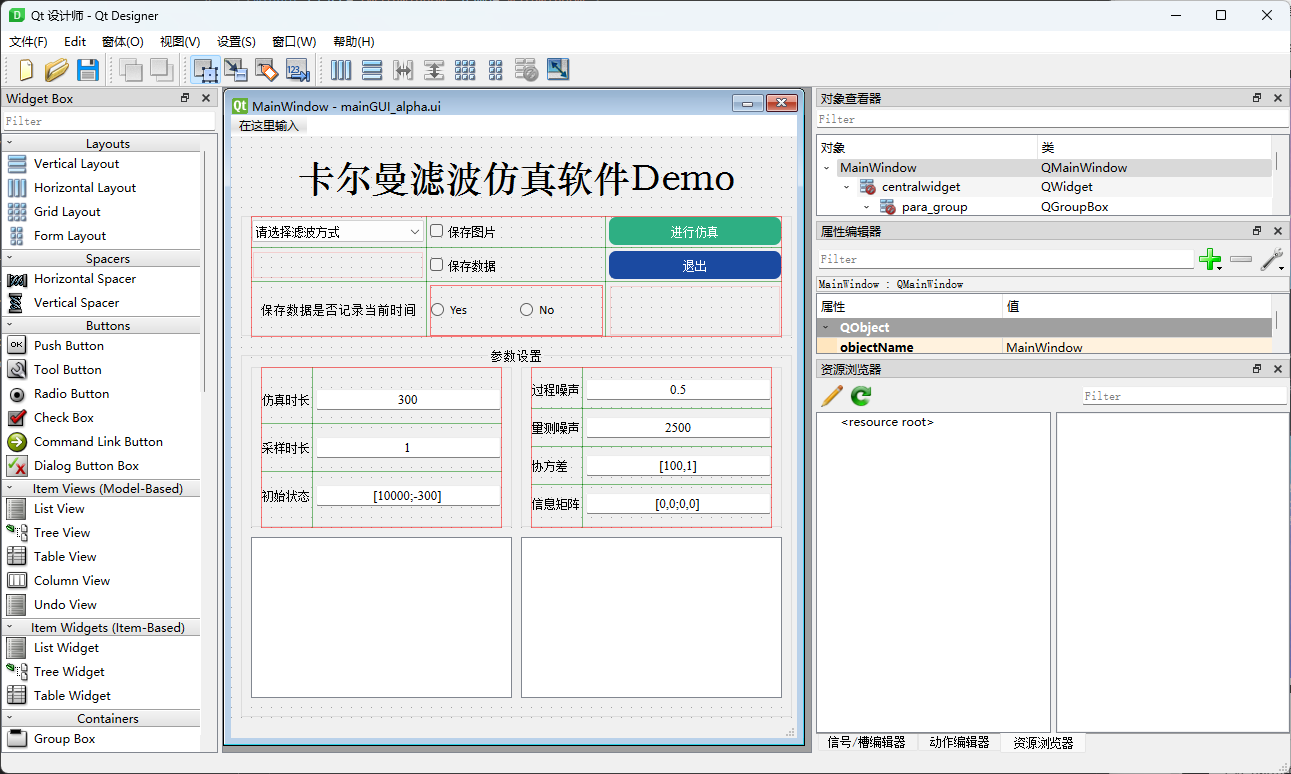
在VsCode里单击右键,选中PYQT: New Form。

弹出下图所示的窗口。
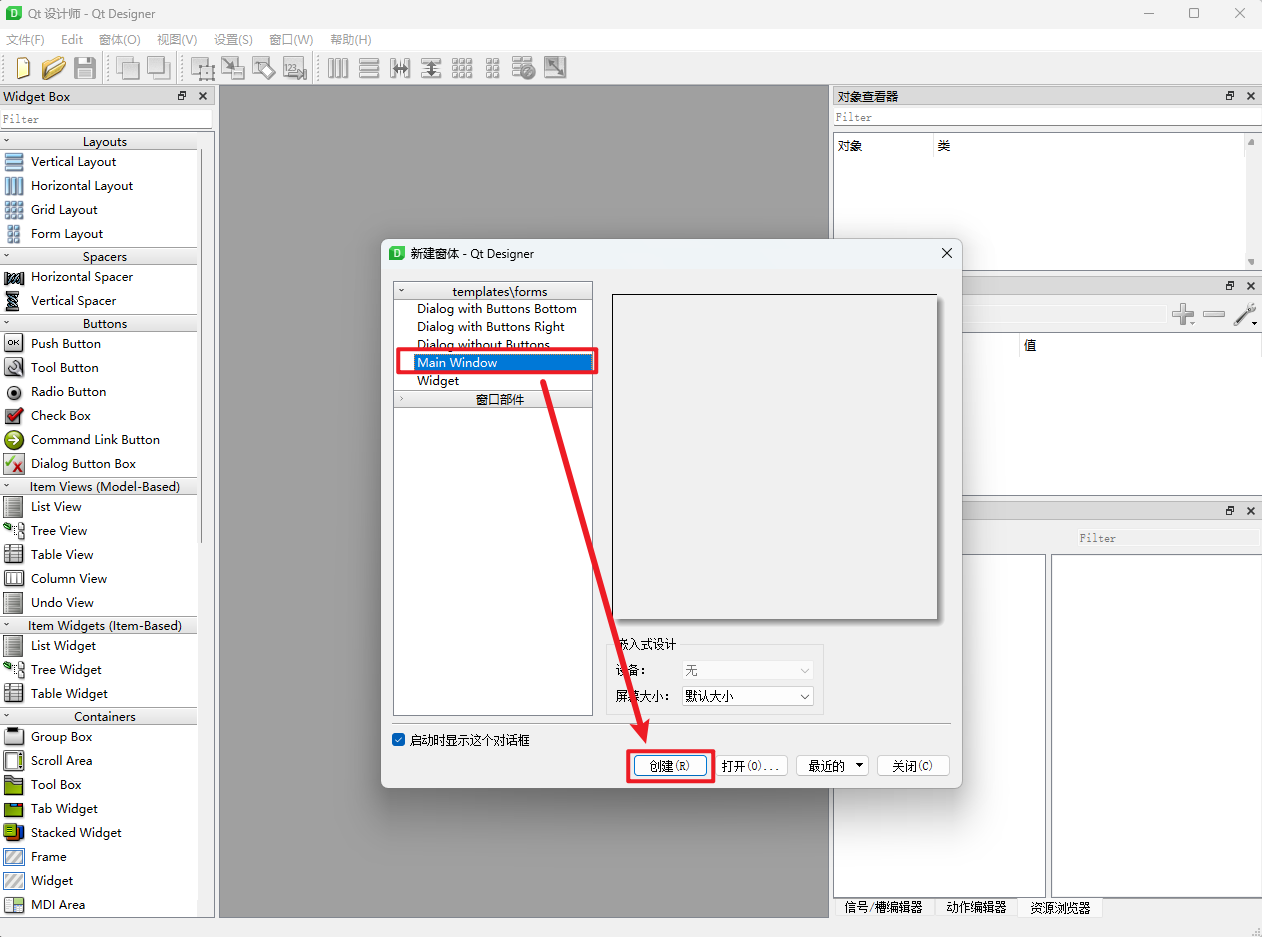
一般是选择Main Window,再点击创建。弹出下图窗口。
这个时候就可以从左边的控件库拖放一些控件到中间的界面中了。
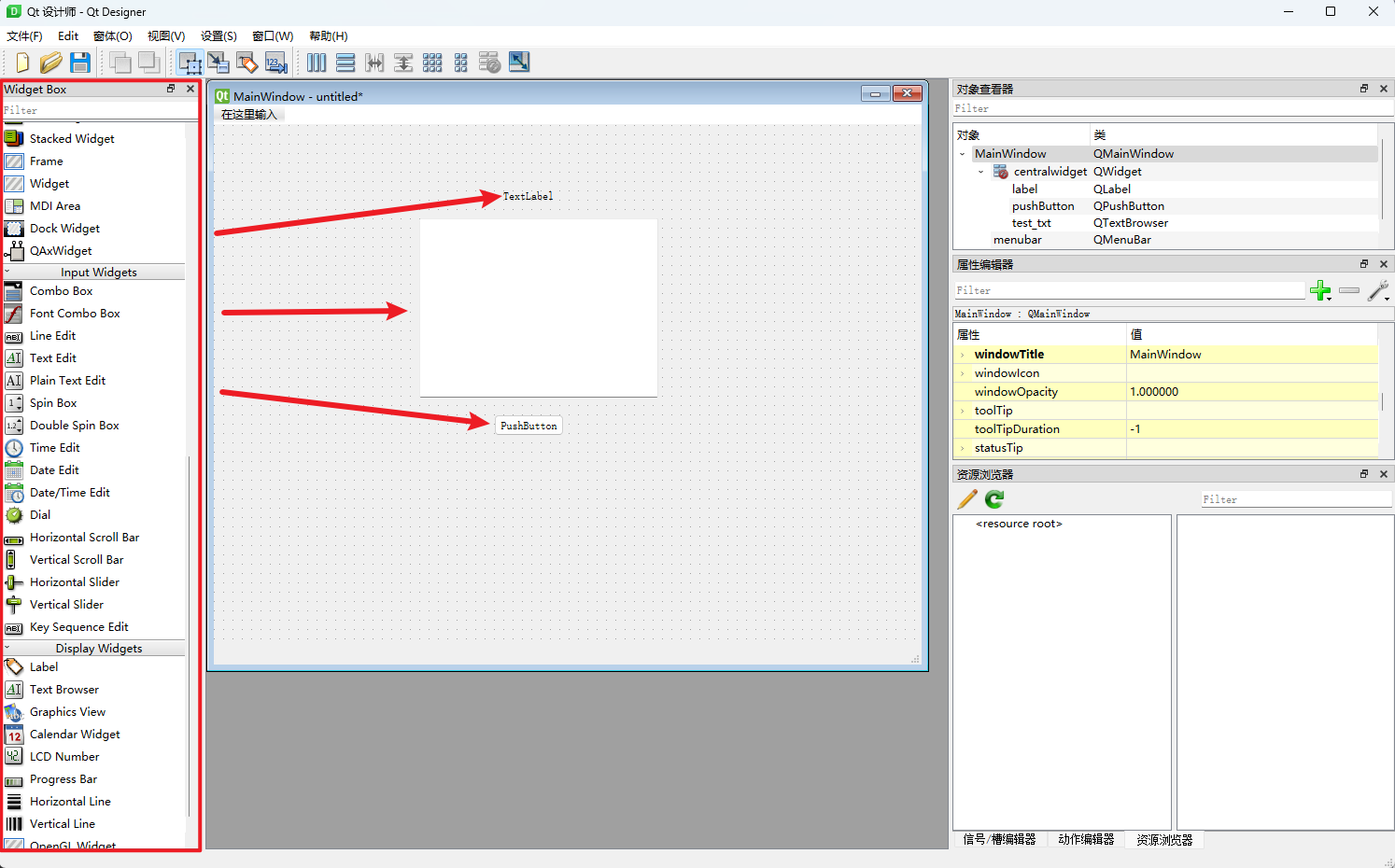
**注意:**每个控件的用法,请参考文献1,2。此处不再赘述。
设计好.ui文件后,还需要将它转换成.py文件。保存好.ui文件,注意它的保存位置。回到VsCode,选中刚保存的.ui文件,先右键单击,再在菜单里选择PYQT: Complie Form。
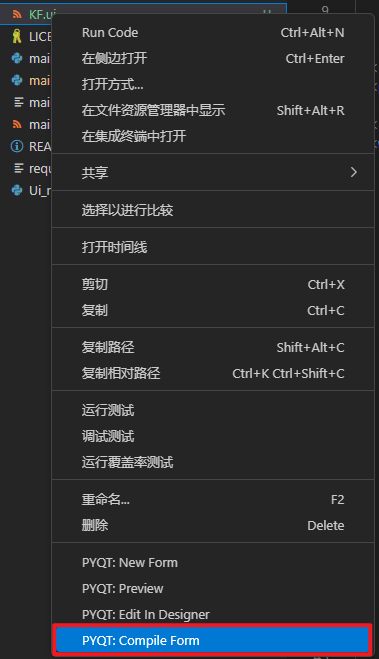
那么就会得到一个新的文件,UI_{your_ui_name}.py,这个文件之后会在写界面逻辑的时候用到。
2.2 .qrc文件建立
.qrc是Qt里会用到的资源文件的集合。首先讲怎么新建qrc资源。右下角有个资源浏览器,先点"资源浏览器",再点这个窗口左上角的铅笔。如下图所示。
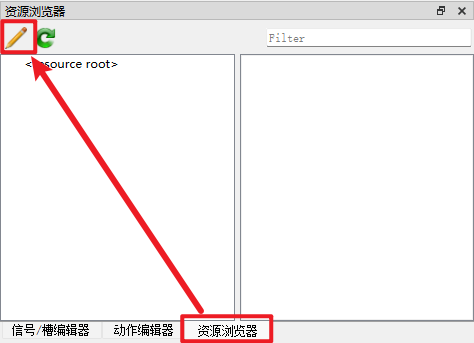
出来资源浏览器后,点击左边的"新建"。

建立好新的.qrc文件后,再点击下图红框所示的按钮,是为该新建.qrc文件建立分类。
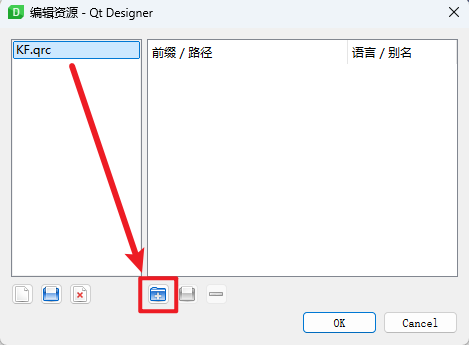
我自己可能会用到的资源都是图片,所以建立的分类前缀为"images"。
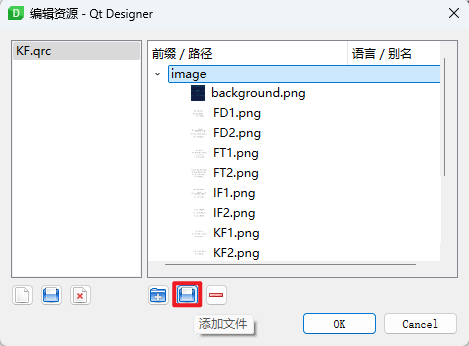
注意 :导入
.qrc文件的过程,请见参考文献1。
同样地,也需要把该.qrc文件转换为.py文件。
回到VsCode,选中刚才建立的.qrc文件。先右键单击,再在菜单里选择PYQT: Complie Resource。

最后会在原文件夹生成一个.py文件。
这里要记住,如果.ui文件中导入了(即使不使用).qrc文件,就必须要将该.qrc文件转换成.py,不然没法运行。如果没有没有在.ui文件里导入过.qrc文件,那么就不用管这个部分。
这里注意,因为
.qrc文件放在子文件夹./asserts里,生成的Ui_xx.py也在子文件夹>./asserts中,而主程序在上一级的主文件中。所以,导入.qrc文件的代码为
pythonimport KF_rc这里要改成从子文件夹导入,为(修改处:
.ui转换后的.py文件)
pythonimport asserts.KF_rc
2.3 qss设计
qss是Qt的风格样式表,作用和css差不多,可以在菜鸟教程里看看css的教程 。
举个例子,先从左边控件库里选择"Push Button",将按钮拖入窗口中,右键单击按钮,选择"修改样式表",弹出来一个编辑样式表的框,如下图所示。
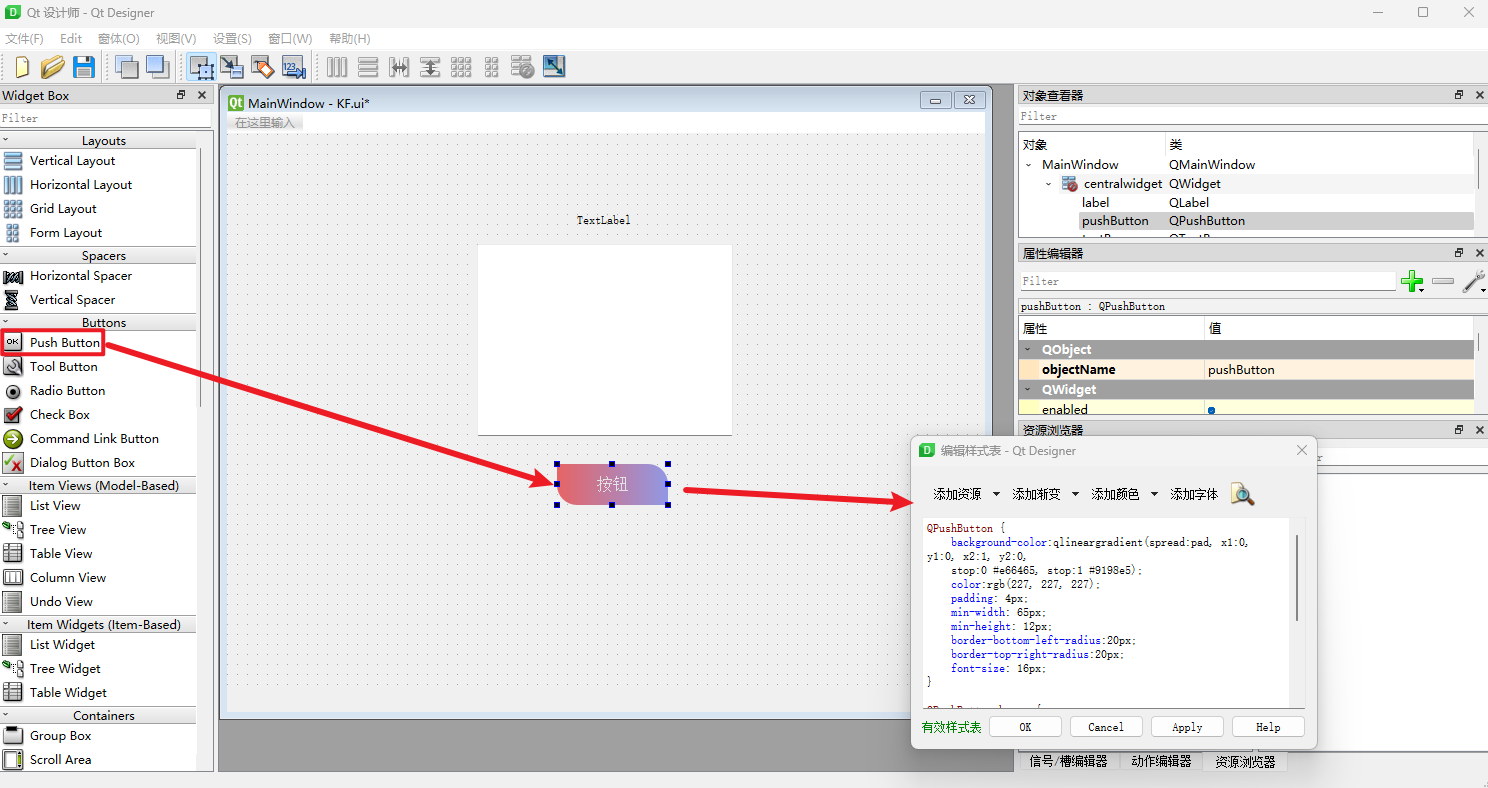
在框内输入如下代码。
css
QPushButton {
background-color:qlineargradient(spread:pad, x1:0, y1:0, x2:1, y2:0,
stop:0 #e66465, stop:1 #9198e5);
color:rgb(227, 227, 227);
padding: 4px;
min-width: 65px;
min-height: 12px;
border-bottom-left-radius:20px;
border-top-right-radius:20px;
font-size: 16px;
}
QPushButton:hover {
background-color: qlineargradient(spread:pad, x1:0, y1:0, x2:1, y2:0,
stop:0 #FF6465, stop:1 #9198FF);
color:white;
}
QPushButton:pressed{
background-color: rgb(65, 65, 65);
color:white;
}效果下图所示,首先是按钮没有被按下时的效果。
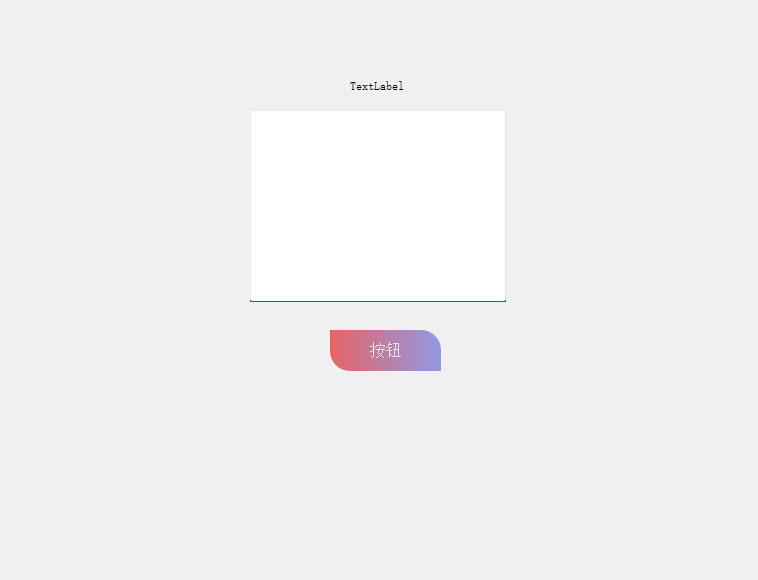
然后是按钮被按下时的效果,按下按钮后,改变按钮的背景色和文字的颜色。

到这里,一个简单的ui界面已经设计完毕。
三、PyQt5的逻辑设计
3.1 新建.py逻辑文件
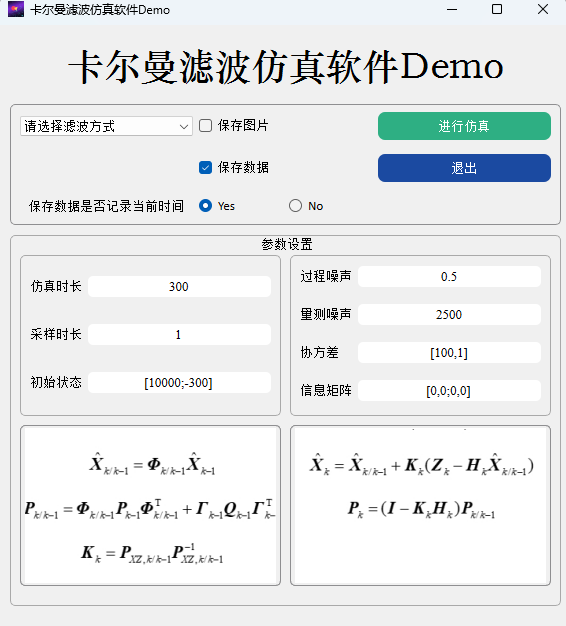
这里是拿使用卡尔曼滤波追踪匀速直线运动的导弹作为例子。
按照下图所示分为三个区域。
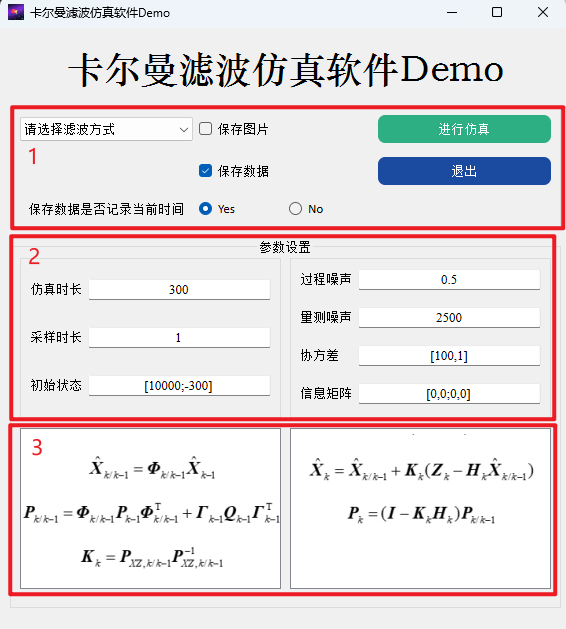
- 区域1:选择滤波模式、数据及图片保存模式,实现开始仿真和退出软件功能;
- 区域2:设置滤波参数;
- 区域3:显示对应滤波方法的原理公式。
这里首先把3个区域的初始框架搭建好,加上亿点细节,得到下图所示界面。
记得把所有控件的键名命名好,方便后面写逻辑的时候调用。
我给自己梳理的规则如下:(键名------控件类)
- xxx_lab------QLabel
- xxx_edit------QLineEdit
- xxx_grid------QGridLayout
- xxx_hbox------QHBoxLayout
- xxx_btn------QPushButton
- xxx_menu------QComboBox
- xxx_box------QCheckBox
- xxx_disp------QGraphicsView
- xxx_group------QGroupBox
这样在调用的时候,控件是什么类型一目了然,方便调用。
在写界面逻辑的时候,代码框架分成三个部分:
- Part 1:导入第三方包
- Part 2:建立主窗口类对象
- Part 3:主函数建立类对象实例并显示界面
python
"""Part 1"""
import [pkgs]
"""Part 2"""
class MainApp(QMainWindow, UI_[your_ui_name]):
def xxx:
pass
"""Part 3"""
if __name__ == '__main__':
pass最重要的是Part 2部分,承担了界面逻辑的关键部分,下面针对本软件的界面逻辑进行详细讲解。
3.1.1 主窗口初始化
在构造类对象实例的时候,对主窗口进行初始化设置。
python
def __init__(self):
"""主窗口初始化"""
super().__init__() # 调用父类的初始化方法
self.setupUi(self) # 加载UI设计
self.init_ui() # 初始化界面设置
self.bind_events() # 绑定UI事件处理函数
self.init_flags() # 初始化标志位变量super().__init__()调用 父类 (QMainWindow)的初始化方法,确保主窗口的基本功能(如窗口显示、事件处理)正常启动。setupUi(self)方法会初始化所有界面元素(如按钮、文本框、GroupBox 等)。而setupUi必须在父类(QMainWindow)的初始化完成后才能调用,否则会导致组件无法正确绑定到主窗口。
3.1.2 初始化界面
python
def init_ui(self):
"""初始化界面显示设置"""
self.setWindowTitle("卡尔曼滤波仿真软件Demo") # 设置窗口标题
self.update_graph_displays(0) # 显示默认滤波方法对应的公式图3.1.3 绑定ui事件处理机制
python
def bind_events(self):
"""绑定UI元素事件到处理函数"""
self.exit_btn.clicked.connect(self.close) # 退出按钮
self.simu_btn.clicked.connect(self.run_simulation) # 仿真按钮
self.method_menu.currentIndexChanged.connect(self.update_method_flag) # 滤波方法选择
self.save_fig_box.toggled.connect(self.update_save_fig_flag) # 保存图表复选框
self.save_data_box.toggled.connect(self.update_save_data_flag) # 保存数据复选框
self.yes_btn.toggled.connect(self.update_with_time_flag) # 带时间戳单选按钮
self.no_btn.toggled.connect(self.update_with_time_flag) # 不带时间戳单选按钮上面()中的函数会在后面给出,是逻辑机制的关键部分。
3.1.4 初始化标志位
这个部分也可以放在__init__()里,写成函数更加符合模块化的要求。便于以后修改。
python
def init_flags(self):
"""初始化控制标志位,存储UI选择状态"""
self.method_flag = "" # 当前选择的滤波方法
self.save_fig_flag = False # 是否保存图表
self.save_data_flag = False # 是否保存数据
self.with_time_flag = False # 是否在保存数据时添加时间戳3.1.5 检查标志位状态
python
def update_save_fig_flag(self, state):
"""更新保存图表标志位"""
self.save_fig_flag = state
def update_save_data_flag(self, state):
"""更新保存数据标志位"""
self.save_data_flag = state
def update_with_time_flag(self, state):
"""更新保存数据时是否添加时间戳标志位"""
self.with_time_flag = self.yes_btn.isChecked() # 根据Yes按钮状态更新标志
def update_method_flag(self, index):
"""更新滤波方法标志位并刷新公式图显示"""
# 滤波方法索引到名称的映射
method_map = {
0: "请选择滤波方式",
1: "信息滤波",
2: "UD滤波",
3: "遗忘滤波",
4: "自适应遗忘滤波(1)",
5: "自适应遗忘滤波(2)"
}
self.method_flag = method_map.get(index, "请选择滤波方式") # 更新方法标志位
self.update_graph_displays(index) # 刷新公式图显示
def check_save_fig_warning(self, state):
"""检测保存图片复选框状态,显示提示"""
if state == QtCore.Qt.Checked: # 当勾选时
msg = QMessageBox()
msg.setIcon(QMessageBox.Warning)
msg.setText("选择"保存图片"则仿真完毕之后不会展示结果。")
msg.setWindowTitle("操作提示")
msg.exec_()3.1.6 读取数据输入
python
def get_lineedit_values(self):
"""获取所有QLineEdit控件中的参数值"""
return {
"simu_time": self.simu_edit.text(), # 仿真时长
"sample_time": self.sample_edit.text(), # 采样时长
"init_state": self.init_edit.text(), # 初始状态
"process_noise": self.process_edit.text(), # 过程噪声
"P_matrix": self.P_edit.text(), # 协方差矩阵
"measure_noise": self.measure_edit.text(), # 量测噪声
"info_matrix": self.info_edit.text() # 信息矩阵
}
def parse_numeric_params(self, params):
"""解析并验证数值参数,转换为指定数据类型"""
errors = []
parsed = {}
# 解析整数
for key in ["simu_time"]:
try:
parsed[key] = int(params[key])
except ValueError:
errors.append(f"{key}: 请输入有效整数")
# 解析浮点数参数
for key in ["sample_time", "process_noise", "measure_noise"]:
try:
parsed[key] = float(params[key])
except ValueError:
errors.append(f"{key}: 请输入有效的浮点数")
# 解析初始状态 (2,) 数组
try:
# 处理类似 "[10000;-300]" 或 "[10000, -300]" 的输入格式
values = params["init_state"].strip("[]").replace(";", ",").split(",")
parsed["init_state"] = np.array([float(v.strip()) for v in values], dtype=float) # v.strip()用于移除字符串开头和结尾的特定字符
if parsed["init_state"].shape != (2,):
raise ValueError("需要包含两个元素的数组")
except Exception as e:
errors.append(f"init_state: {str(e)} (格式应为 [值1, 值2])")
# 解析协方差矩阵 (2,) 数组
try:
# 处理类似 "[100,1]" 或 "[100;1]" 的输入格式
values = params["P_matrix"].strip("[]").replace(";", ",").split(",")
parsed["P_matrix"] = np.array([float(v.strip()) for v in values], dtype=float) # v.strip()用于移除字符串开头和结尾的特定字符
if parsed["P_matrix"].shape != (2,):
raise ValueError("需要包含两个元素的数组")
except Exception as e:
errors.append(f"P_matrix: {str(e)} (格式应为 [值1, 值2])")
# 解析信息矩阵 (2,2) 数组
try:
# 处理类似 "[0,0;0,0]" 的输入格式
rows = params["info_matrix"].strip("[]").split(";")
parsed["info_matrix"] = np.array(
[[float(v) for v in row.split(",")] for row in rows],
dtype=float
)
if parsed["info_matrix"].shape != (2, 2):
raise ValueError("需要2x2的数组格式")
except Exception as e:
errors.append(f"info_matrix: {str(e)} (格式应为 [值1,值2;值3,值4])")
return parsed, errors3.1.7 根据不同的滤波方法显示不同的原理公式
python
def update_graph_displays(self, index):
"""根据选择的滤波方法更新公式图显示"""
# 滤波方法索引到公式图路径的映射
image_paths = [
("./asserts/KF1.png", "./asserts/KF2.png"), # 0: 卡尔曼滤波
("./asserts/IF1.png", "./asserts/IF2.png"), # 1: 信息滤波
("./asserts/UD1.png", "./asserts/UD2.png"), # 2: UD滤波
("./asserts/FD1.png", "./asserts/FD2.png"), # 3: 遗忘滤波
("./asserts/FT1.png", "./asserts/FT2.png"), # 4: 自适应遗忘滤波(1)
("./asserts/FT1.png", "./asserts/FT2.png"), # 5: 自适应遗忘滤波(2)
]
if 0 <= index < len(image_paths): # 确保索引有效
img1_path, img2_path = image_paths[index]
self.display_image(self.eq1_disp, img1_path) # 显示第一个公式图
self.display_image(self.eq2_disp, img2_path) # 显示第二个公式图
def display_image(self, graphics_view, image_path):
"""在指定的QGraphicsView中显示图片"""
scene = QtWidgets.QGraphicsScene(graphics_view) # 创建图形场景
pixmap = QtGui.QPixmap(image_path) # 加载图片
# 缩放图片以适应视图大小,保持纵横比并平滑缩放
scaled_pixmap = pixmap.scaled(
graphics_view.size(),
QtCore.Qt.KeepAspectRatio,
QtCore.Qt.SmoothTransformation
)
scene.addPixmap(scaled_pixmap) # 将缩放后的图片添加到场景
graphics_view.setScene(scene) # 设置视图的场景
graphics_view.setAlignment(QtCore.Qt.AlignCenter) # 图片居中显示3.1.8 为程序设置icon
python
def set_application_icon(self):
"""设置应用程序图标"""
icon_path = os.path.join(os.path.dirname(os.path.abspath(__file__)), 'asserts', 'logo.ico')
if os.path.exists(icon_path):
self.setWindowIcon(QtGui.QIcon(icon_path))
print(f"应用程序图标已设置: {icon_path}")
else:
print(f"警告: 图标文件不存在 - {icon_path}")3.1.9 执行仿真
python
def run_simulation(self):
"""执行仿真按钮点击事件处理"""
# 收集标志位参数
flags = {
"method_flag": self.method_flag,
"save_fig_flag": self.save_fig_flag,
"save_data_flag": self.save_data_flag,
"save_data_time_flag": self.with_time_flag
}
# 收集文本框参数
params_txt = self.get_lineedit_values()
# 解析数值参数
params, errors = self.parse_numeric_params(params_txt)
# 检查是否有解析错误
if errors:
error_msg = "参数解析错误:\n" + "\n".join(errors)
QMessageBox.critical(self, "参数错误", error_msg)
return
# 打印所有参数(实际应用中可替换为仿真计算逻辑)
# print("\n===== 仿真参数设置 =====")
# print("滤波方法:", flags["method_flag"])
# print("保存图表:", flags["save_fig_flag"])
# print("保存数据:", flags["save_data_flag"])
# print("数据带时间戳:", flags["save_data_time_flag"])
# print("\n===== 仿真具体参数 =====")
# print("仿真时长:", params["simu_time"])
# print("采样时长:", params["sample_time"])
# print("初始状态:\n", params["init_state"])
# print("过程噪声:", params["process_noise"])
# print("协方差矩阵:\n", params["P_matrix"])
# print("量测噪声:", params["measure_noise"])
# print("信息矩阵:\n", params["info_matrix"])
print("===== 开始仿真计算 =====")
# 仿真参数
T = params["simu_time"] # 仿真时长
Ts = params["sample_time"] # 采样时长
Q = params["process_noise"] * Ts # 过程噪声
R = params["measure_noise"] # 量测噪声
# 生成噪声序列
W = np.sqrt(Q) * np.random.randn(1, T)
V = np.sqrt(R) * np.random.randn(1, T)
p0 = params["P_matrix"] # 初始协方差阵参数
P0 = np.diag([p0[0], p0[1]]) # 初始协方差阵
I0 = params["info_matrix"] # 初始信息阵设置为0
# 系统矩阵
A = np.array([[0, 1], [0, 0]]) # 状态矩阵
I = np.eye(2) # 单位阵
Phi = I + A * Ts # 离散化
H = np.array([[1, 0]]) # 量测矩阵
Gamma = np.array([[0], [1]])
# 设置滤波维度
nS = 2 # 状态维度
nZ = 1 # 观测维度
# 分配空间
x_state = np.zeros((nS, T)) # 系统真实值
z_mea = np.zeros((nZ, T)) # 系统观测值
x_KF = np.zeros((nS, T)) # 卡尔曼滤波状态值
# 赋初值
x_state[:, 0] = params["init_state"] # 系统状态初值
z_mea[:, 0] = np.dot(H, x_state[:, 0]) # 系统观测初值
x_KF[:, 0] = x_state[:, 0] # 卡尔曼滤波器估计初值
# 02 用模型模拟真实状态
for t in range(1, T):
x_state[:, t] = np.dot(Phi,x_state[:, t-1]) + np.dot(Gamma, W[0, t]).squeeze()
z_mea[:, t] = np.dot(H, x_state[:, t]) + V[0, t]
# 03-1 Kalman滤波
if self.method_flag == '请选择滤波方式':
mode = 'null'
print("请先选择滤波方法!")
QMessageBox.warning(self, "操作提示", "请先选择滤波方法!", QMessageBox.Ok)
return # 终止仿真流程
# #下述代码为KF滤波方法
# mode = 'null'
# mode_str = 'KF'
# P0_kf = P0.copy() # 复制初始P0
# for t in range(1, T):
# x_KF[:, t], P0_kf = KF(x_KF, P0_kf, z_mea, Phi, Gamma, H, Q, R, I, t)
# # 画图
# filter_plot(x_state, z_mea, x_KF, None, None, None, None, T, mode, self.save_fig_flag, mode_str)
# 04-1 习题1:信息滤波
elif self.method_flag == '信息滤波':
mode = 'Problem 1'
mode_str = 'IF'
# 分配空间并赋予滤波器变量初值
s_IF = np.zeros((nS, T)) # 信息滤波状态值
x_IF = np.zeros((nS, T))
s_IF[:, 0] = np.dot(I0, x_state[:, 0]) # 信息滤波器赋估计初值
Phi_inv = np.linalg.pinv(Phi) # 先求逆,减少计算量
Q_inv = 1/Q
R_inv = 1/R
# 重新初始化I0为协方差阵的逆
I0 = np.linalg.inv(P0.copy())
for t in range(1, T):
M_k_1 = np.dot(np.dot(Phi_inv.T, I0), Phi_inv)
N_k_1 = np.dot(np.dot(np.dot(M_k_1, Gamma), np.linalg.pinv(np.dot(np.dot(Gamma.T, M_k_1), Gamma) + Q_inv)), Gamma.T)
S_pre = np.dot((I - N_k_1), np.dot(Phi_inv.T, s_IF[:, t-1]))
I_pre = np.dot((I - N_k_1), M_k_1)
s_IF[:, t] = S_pre + np.dot(H.T, np.dot(R_inv, z_mea[:, t]))
I0 = I_pre + np.dot(H.T, np.dot(R_inv, H))
x_IF[:, t] = np.dot(np.linalg.pinv(I0), s_IF[:, t])
# 画图
filter_plot(x_state, z_mea, x_KF, x_IF, None, None, None, T, mode, self.save_fig_flag, mode_str)
print("滤波方法:", flags["method_flag"])
# 04-2 习题2:UD滤波
elif self.method_flag == 'UD滤波':
mode = 'Problem 2'
mode_str = 'UD'
# 分配空间并赋予滤波器变量初值
x_UD = np.zeros((nS, T)) # UD滤波状态值
x_UD[:, 0] = x_state[:, 0] # UD滤波器赋估计初值
P0_ud = np.diag([10**2, 1**2]) # 初始协方差阵
for t in range(1, T):
# 时间更新
xUD_pre = np.dot(Phi, x_UD[:, t-1])
U, D = udu(P0_ud) # 将协方差阵作UD分解
U, D = UD_update(U, D, Phi, Gamma, Q, H, R, 'T') # 时间更新
P_pre = np.dot(np.dot(U, np.diag(D.flatten())), U.T)
# 量测更新
K = np.dot(np.dot(P_pre, H.T), np.linalg.pinv(np.dot(np.dot(H, P_pre), H.T) + R))
x_UD[:, t] = xUD_pre + np.dot(K, (z_mea[:, t] - np.dot(H, xUD_pre)))
U, D = udu(P_pre) # 将一步预测协方差阵作UD分解
U, D = UD_update(U, D, Phi, Gamma, Q, H, R, 'M') # 测量更新
P0_ud = np.dot(np.dot(U, np.diag(D.flatten())), U.T)
# 画图
filter_plot(x_state, z_mea, x_KF, None, x_UD, None, None, T, mode, self.save_fig_flag, mode_str)
print("滤波方法:", flags["method_flag"])
# 04-3 习题3:遗忘滤波
elif self.method_flag == '遗忘滤波':
mode = 'Problem 3'
mode_str = 'FD'
# 根据题设条件,设置初始化参数
a = 1 # 加速度(m/s^2),减速机动,因为速度为负,所以这里符号为正
acc = np.dot(np.array([0.5*Ts**2, Ts]), a) # 构造矩阵
t_100 = 100 # 时间(s),导弹在第100秒时,减速机动
t_200 = 200 # 时间(s),导弹在第200秒后,停止减速机动,进入匀速运动
# 根据题设条件,用模型模拟真实状态
for t in range(1, T):
if t < t_100 or t >= t_200:
x_state[:, t] = np.dot(Phi, x_state[:, t-1]) + np.dot(Gamma, W[0, t]).squeeze()
else:
x_state[:, t] = np.dot(Phi, x_state[:, t-1]) + acc + np.dot(Gamma, W[0, t]).squeeze()
z_mea[:, t] = np.dot(H, x_state[:, t]) + V[0, t]
# 分配空间并赋予滤波器变量初值
s = 1.1 # 渐消因子
x_KF = np.zeros((nS, T)) # 卡尔曼滤波状态值
x_KF[:, 0] = x_state[:, 0] # 卡尔曼滤波器估计初值
x_FD = np.zeros((nS, T)) # 遗忘滤波状态值
x_FD[:, 0] = x_state[:, 0] # 遗忘滤波器赋估计初值
# 再做一次卡尔曼滤波
P0_kf = np.diag([10**2, 1**2]) # 重新设置初始P0
for t in range(1, T):
x_KF[:, t], P0_kf = KF(x_KF, P0_kf, z_mea, Phi, Gamma, H, Q, R, I, t)
# 遗忘滤波
P0_fd = np.diag([10**2, 1**2]) # 重新设置初始P0
for t in range(1, T):
# 时间更新
xFD_pre = np.dot(Phi, x_FD[:, t-1])
P_pre = np.dot(np.dot(Phi, s * P0_fd), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T)
# 量测更新
K = np.dot(np.dot(P_pre, H.T), np.linalg.pinv(np.dot(np.dot(H, P_pre), H.T) + R))
x_FD[:, t] = xFD_pre + np.dot(K, (z_mea[:, t] - np.dot(H, xFD_pre)))
P0_fd = np.dot((I - np.dot(K, H)), P_pre)
# 画图
filter_plot(x_state, z_mea, x_KF, None, None, x_FD, None, T, mode, self.save_fig_flag, mode_str)
print("滤波方法:", flags["method_flag"])
# 04-4-1 习题4(1)
elif self.method_flag == '自适应遗忘滤波(1)':
mode = 'Problem 4-1'
mode_str = 'FT1'
R_1s = 100 # 量测噪声方差为100m^2
R_100s = 10000 # 量测噪声方差为10000m^2
# 构造量测噪声序列
V = np.zeros((1, T))
V[0, :100] = np.sqrt(R_1s) * np.random.randn(100) # 1-100s,方差为100m^2
V[0, 100:] = np.sqrt(R_100s) * np.random.randn(T-100) # 100s之后,方差为10000m^2
# 根据题设条件,用模型模拟真实状态
for t in range(1, T):
if t == 150: # 在150s时出现量测故障导致雷达输出为0
z_mea[:, t] = 0
else:
z_mea[:, t] = np.dot(H, x_state[:, t]) + V[0, t]
# 再做一次卡尔曼滤波
P0_kf = np.diag([10**2, 1**2]) # 重新设置初始P0
for t in range(1, T):
# 时间更新
xKF_pre = np.dot(Phi, x_KF[:, t-1])
P_pre = np.dot(np.dot(Phi, P0_kf), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T)
# 量测更新
K = np.dot(np.dot(P_pre, H.T), np.linalg.pinv(np.dot(np.dot(H, P_pre), H.T) + R_1s))
x_KF[:, t] = xKF_pre + np.dot(K, (z_mea[:, t] - np.dot(H, xKF_pre)))
P0_kf = np.dot((I - np.dot(K, H)), P_pre)
# 分配空间并赋予滤波器变量初值
x_fault = np.zeros((nS, T)) # 自适应遗忘滤波状态值
x_fault[:, 0] = x_state[:, 0] # 自适应遗忘滤波器赋估计初值
beta = np.zeros(T)
beta[0] = 1
b = 0.999 # 渐消因子
C = np.dot(np.dot(H, (np.dot(np.dot(Phi, P0), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T))), H.T) + R # 新息序列方差阵
zNew = 15
# 量测噪声方差自适应滤波处理
for t in range(1, T):
# 时间更新
xFault_pre = np.dot(Phi, x_fault[:, t-1]) # 状态一步预测
P_pre = np.dot(np.dot(Phi, P0), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T) # 协方差一步预测
# 量测更新
beta[t] = beta[t-1] / (beta[t-1] + b) # 更新新息序列方差阵的系数
C = (1 - beta[t]) * C + beta[t] * (zNew * zNew)
if abs(np.trace(C) / np.trace(np.dot(np.dot(H, P_pre), H.T) + R_1s)) > 2: # 量测故障检测与隔离
x_fault[:, t] = xFault_pre # 无需量测更新,估计值用时间更新值代替
P0 = P_pre
else:
alpha = np.trace(C - np.dot(np.dot(H, P_pre), H.T)) / np.trace(np.array([[R_1s]])) # 将 R_1s 转换为 1x1 矩阵
K = np.dot(np.dot(P_pre, H.T), np.linalg.pinv(np.dot(np.dot(H, P_pre), H.T) + alpha * R_1s))
zNew = z_mea[:, t] - np.dot(H, xFault_pre)
x_fault[:, t] = xFault_pre + np.dot(K, zNew)
P0 = np.dot((I - np.dot(K, H)), P_pre)
# 画图
filter_plot(x_state, z_mea, x_KF, None, None, None, x_fault, T, mode, self.save_fig_flag, mode_str)
print("滤波方法:", flags["method_flag"])
# 04-4-2 习题4(2)
elif self.method_flag == '自适应遗忘滤波(2)':
mode = 'Problem 4-2'
mode_str = 'FT2'
R_1s = 100 # 量测噪声方差为100m^2
R_100s = 10 # 量测噪声方差为10m^2
# 构造量测噪声序列
V = np.zeros((1, T))
V[0, :100] = np.sqrt(R_1s) * np.random.randn(100) # 1-100s,方差为100m^2
V[0, 100:] = np.sqrt(R_100s) * np.random.randn(T-100) # 100s之后,方差为10m^2
# 根据题设条件,用模型模拟真实状态
for t in range(1, T):
z_mea[:, t] = np.dot(H, x_state[:, t]) + V[0, t]
# 再做一次卡尔曼滤波
P0_kf = np.diag([10**2, 1**2]) # 重新设置初始P0
for t in range(1, T):
# 时间更新
xKF_pre = np.dot(Phi, x_KF[:, t-1])
P_pre = np.dot(np.dot(Phi, P0_kf), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T)
# 量测更新
K = np.dot(np.dot(P_pre, H.T), np.linalg.pinv(np.dot(np.dot(H, P_pre), H.T) + R_1s))
x_KF[:, t] = xKF_pre + np.dot(K, (z_mea[:, t] - np.dot(H, xKF_pre)))
P0_kf = np.dot((I - np.dot(K, H)), P_pre)
# 分配空间并赋予滤波器变量初值
x_fault = np.zeros((nS, T)) # 自适应遗忘滤波状态值
x_fault[:, 0] = x_state[:, 0] # 自适应遗忘滤波器赋估计初值
beta = np.zeros(T)
beta[0] = 1
b = 0.999 # 渐消因子
C = np.dot(np.dot(H, (np.dot(np.dot(Phi, P0), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T))), H.T) + R # 新息序列方差阵
zNew = 15
# 量测噪声方差自适应滤波处理
for t in range(1, T):
# 时间更新
xFault_pre = np.dot(Phi, x_fault[:, t-1]) # 状态一步预测
P_pre = np.dot(np.dot(Phi, P0), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T) # 协方差一步预测
# 量测更新
beta[t] = beta[t-1] / (beta[t-1] + b) # 更新新息序列方差阵的系数
C = (1 - beta[t]) * C + beta[t] * (zNew * zNew)
if abs(np.trace(C) / np.trace(np.dot(np.dot(H, P_pre), H.T) + R_1s)) > 2: # 量测故障检测与隔离
x_fault[:, t] = xFault_pre # 无需量测更新,估计值用时间更新值代替
P0 = P_pre
else:
alpha = np.trace(C - np.dot(np.dot(H, P_pre), H.T)) / np.trace(np.array([[R_1s]])) # 将 R_1s 转换为 1x1 矩阵
K = np.dot(np.dot(P_pre, H.T), np.linalg.pinv(np.dot(np.dot(H, P_pre), H.T) + alpha * R_1s))
zNew = z_mea[:, t] - np.dot(H, xFault_pre)
x_fault[:, t] = xFault_pre + np.dot(K, zNew)
P0 = np.dot((I - np.dot(K, H)), P_pre)
# 画图
filter_plot(x_state, z_mea, x_KF, None, None, None, x_fault, T, mode, self.save_fig_flag, mode_str)
print("滤波方法:", flags["method_flag"])3.1.10 保存数据
python
# 保存数据
if self.save_data_flag:
data_to_save = {
'x_state': x_state,
'z_mea': z_mea,
'xKF': x_KF,
'mode': mode,
'T': T,
'Ts': Ts,
'Q': Q,
'R': R
}
if mode == 'Problem 1':
data_to_save['xIF'] = x_IF
elif mode == 'Problem 2':
data_to_save['xUD'] = x_UD
elif mode == 'Problem 3':
data_to_save['xFD'] = x_FD
elif mode in ['Problem 4-1', 'Problem 4-2']:
data_to_save['xFault'] = x_fault
if self.with_time_flag:
# 获取当前日期
now = datetime.now()
date_str = now.strftime("%Y%m%d")
save_path = f'./data/{mode_str}_{date_str}.pkl'
else:
save_path = f'./data/{mode_str}.pkl'
# 使用pickle保存数据
with open(save_path, 'wb') as f:
pickle.dump(data_to_save, f, protocol=pickle.HIGHEST_PROTOCOL)
print(f"仿真结果已保存至: ./figures/")
print(f"数据已保存至: {save_path}")
print("===== 仿真计算结束 =====")这个部分写在run_simulation()里。
3.1.11 分辨率自适应
不同屏幕分辨率下,界面大小也会有所不同。我自己使用的屏幕是一块2k屏幕,在这块屏幕上开发完毕后。再在笔记本电脑屏幕上打开,界面就会崩坏。如下图所示。
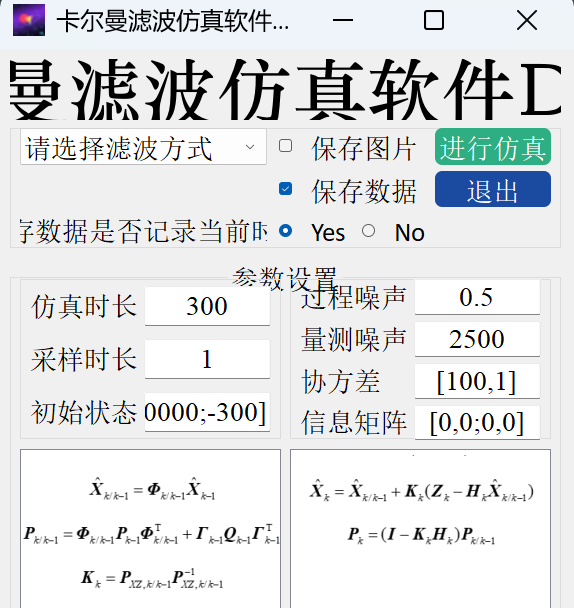
这样是不行的,因为不能只在自己特定的屏幕上显示正常,以后还要放在其他电脑上运行,无法预知对方的屏幕分辨率。所以需要分辨率自适应变化的功能,在主程序里写入如下代码。
python
QtCore.QCoreApplication.setAttribute(QtCore.Qt.AA_EnableHighDpiScaling)再者,加上上面的代码之后,控件的分辨率自适应问题解决了,但是字体的分辨率自适应问题还没有解决。字体变得特别特别小,几乎看不见。
所以还要加上这一段代码。
python
screen = app.primaryScreen() # 返回当前主显示器的信息
scale_factor = screen.logicalDotsPerInch() / 96 # 96dpi为标准缩放(100%),结果如1.75(175%缩放)
font = QtGui.QFont() # 创建默认字体
font.setPointSize(int(10 * scale_factor)) # 原字体10pt,乘以缩放因子
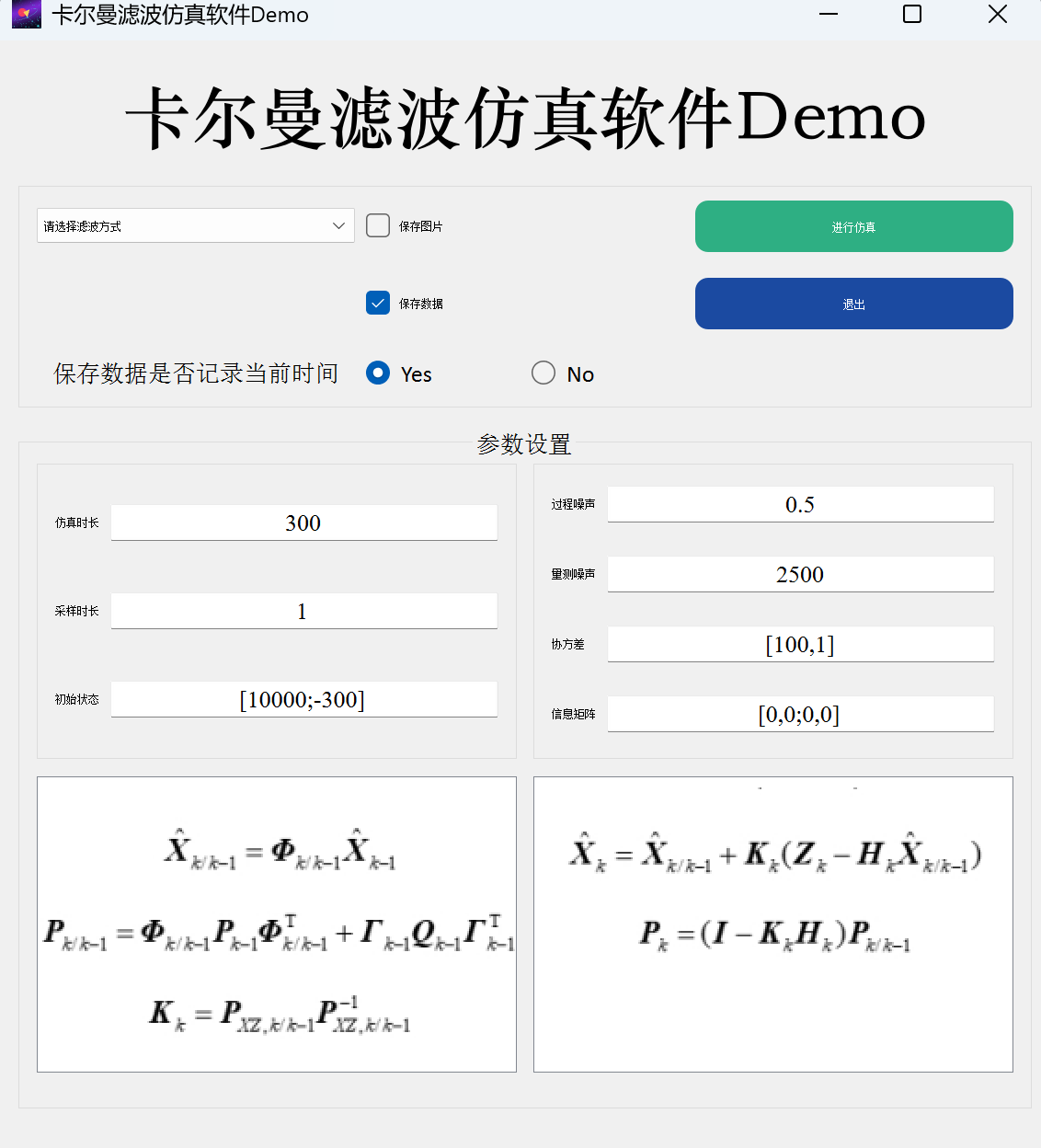
app.setFont(font)3.2 最终成品
最后,整个界面如下图所示。
主程序代码如下。
python
import sys
import os
import numpy as np
# 导入PyQt5所需模块
from PyQt5 import QtCore, QtGui, QtWidgets
from PyQt5.QtWidgets import QApplication, QMainWindow, QMessageBox
from Ui_mainGUI_alpha import Ui_MainWindow
# 导入PyQt风格模块
# 导入方法
from user_function.KF import KF
from user_function.UD_update import UD_update
from user_function.udu import udu
from user_function.filter_plot import filter_plot
# 导入保存数据所需模块
import pickle
import numpy as np
from datetime import datetime
class MainApp(QMainWindow, Ui_MainWindow):
def __init__(self):
"""主窗口初始化"""
super().__init__() # 调用父类的初始化方法
self.setupUi(self) # 加载UI设计
self.init_ui() # 初始化界面设置
self.bind_events() # 绑定UI事件处理函数
self.init_flags() # 初始化标志位变量
# 设置图形显示区域无边框和滚动条
self.eq1_disp.setVerticalScrollBarPolicy(QtCore.Qt.ScrollBarAlwaysOff)
self.eq1_disp.setHorizontalScrollBarPolicy(QtCore.Qt.ScrollBarAlwaysOff)
self.eq2_disp.setVerticalScrollBarPolicy(QtCore.Qt.ScrollBarAlwaysOff)
self.eq2_disp.setHorizontalScrollBarPolicy(QtCore.Qt.ScrollBarAlwaysOff)
# 设置默认选中状态
self.yes_btn.setChecked(True) # 默认选择"带时间戳"选项
self.save_fig_box.setChecked(False) # 默认选择"保存图片"选项
self.save_data_box.setChecked(True) # 默认选择"保存数据"选项
# 初始化下拉菜单栏状态
self.method_menu.currentIndexChanged.emit(0) # 触发索引0的变化(默认选项)
# 设置应用程序图标
self.set_application_icon()
# 绑定保存图片复选框的状态变更事件
self.save_fig_box.stateChanged.connect(self.check_save_fig_warning)
def init_ui(self):
"""初始化界面显示设置"""
self.setWindowTitle("卡尔曼滤波仿真软件Demo") # 设置窗口标题
self.update_graph_displays(0) # 显示默认滤波方法对应的公式图
def init_flags(self):
"""初始化控制标志位,存储UI选择状态"""
self.method_flag = "" # 当前选择的滤波方法
self.save_fig_flag = False # 是否保存图表
self.save_data_flag = False # 是否保存数据
self.with_time_flag = False # 是否在保存数据时添加时间戳
def bind_events(self):
"""绑定UI元素事件到处理函数"""
self.exit_btn.clicked.connect(self.close) # 退出按钮
self.simu_btn.clicked.connect(self.run_simulation) # 仿真按钮
self.method_menu.currentIndexChanged.connect(self.update_method_flag) # 滤波方法选择
self.save_fig_box.toggled.connect(self.update_save_fig_flag) # 保存图表复选框
self.save_data_box.toggled.connect(self.update_save_data_flag) # 保存数据复选框
self.yes_btn.toggled.connect(self.update_with_time_flag) # 带时间戳单选按钮
self.no_btn.toggled.connect(self.update_with_time_flag) # 不带时间戳单选按钮
def set_application_icon(self):
"""设置应用程序图标"""
icon_path = os.path.join(os.path.dirname(os.path.abspath(__file__)), 'asserts', 'logo.ico')
if os.path.exists(icon_path):
self.setWindowIcon(QtGui.QIcon(icon_path))
print(f"应用程序图标已设置: {icon_path}")
else:
print(f"警告: 图标文件不存在 - {icon_path}")
def check_save_fig_warning(self, state):
"""检测保存图片复选框状态,显示提示"""
if state == QtCore.Qt.Checked: # 当勾选时
msg = QMessageBox()
msg.setIcon(QMessageBox.Warning)
msg.setText("选择"保存图片"则仿真完毕之后不会展示结果。")
msg.setWindowTitle("操作提示")
msg.exec_()
def update_method_flag(self, index):
"""更新滤波方法标志位并刷新公式图显示"""
# 滤波方法索引到名称的映射
method_map = {
0: "请选择滤波方式",
1: "信息滤波",
2: "UD滤波",
3: "遗忘滤波",
4: "自适应遗忘滤波(1)",
5: "自适应遗忘滤波(2)"
}
self.method_flag = method_map.get(index, "请选择滤波方式") # 更新方法标志位
self.update_graph_displays(index) # 刷新公式图显示
def update_save_fig_flag(self, state):
"""更新保存图表标志位"""
self.save_fig_flag = state
def update_save_data_flag(self, state):
"""更新保存数据标志位"""
self.save_data_flag = state
def update_with_time_flag(self, state):
"""更新保存数据时是否添加时间戳标志位"""
self.with_time_flag = self.yes_btn.isChecked() # 根据Yes按钮状态更新标志
def update_graph_displays(self, index):
"""根据选择的滤波方法更新公式图显示"""
# 滤波方法索引到公式图路径的映射
image_paths = [
("./asserts/KF1.png", "./asserts/KF2.png"), # 0: 卡尔曼滤波
("./asserts/IF1.png", "./asserts/IF2.png"), # 1: 信息滤波
("./asserts/UD1.png", "./asserts/UD2.png"), # 2: UD滤波
("./asserts/FD1.png", "./asserts/FD2.png"), # 3: 遗忘滤波
("./asserts/FT1.png", "./asserts/FT2.png"), # 4: 自适应遗忘滤波(1)
("./asserts/FT1.png", "./asserts/FT2.png"), # 5: 自适应遗忘滤波(2)
]
if 0 <= index < len(image_paths): # 确保索引有效
img1_path, img2_path = image_paths[index]
self.display_image(self.eq1_disp, img1_path) # 显示第一个公式图
self.display_image(self.eq2_disp, img2_path) # 显示第二个公式图
def display_image(self, graphics_view, image_path):
"""在指定的QGraphicsView中显示图片"""
scene = QtWidgets.QGraphicsScene(graphics_view) # 创建图形场景
pixmap = QtGui.QPixmap(image_path) # 加载图片
# 缩放图片以适应视图大小,保持纵横比并平滑缩放
scaled_pixmap = pixmap.scaled(
graphics_view.size(),
QtCore.Qt.KeepAspectRatio,
QtCore.Qt.SmoothTransformation
)
scene.addPixmap(scaled_pixmap) # 将缩放后的图片添加到场景
graphics_view.setScene(scene) # 设置视图的场景
graphics_view.setAlignment(QtCore.Qt.AlignCenter) # 图片居中显示
def get_lineedit_values(self):
"""获取所有QLineEdit控件中的参数值"""
return {
"simu_time": self.simu_edit.text(), # 仿真时长
"sample_time": self.sample_edit.text(), # 采样时长
"init_state": self.init_edit.text(), # 初始状态
"process_noise": self.process_edit.text(), # 过程噪声
"P_matrix": self.P_edit.text(), # 协方差矩阵
"measure_noise": self.measure_edit.text(), # 量测噪声
"info_matrix": self.info_edit.text() # 信息矩阵
}
def parse_numeric_params(self, params):
"""解析并验证数值参数,转换为指定数据类型"""
errors = []
parsed = {}
# 解析整数
for key in ["simu_time"]:
try:
parsed[key] = int(params[key])
except ValueError:
errors.append(f"{key}: 请输入有效整数")
# 解析浮点数参数
for key in ["sample_time", "process_noise", "measure_noise"]:
try:
parsed[key] = float(params[key])
except ValueError:
errors.append(f"{key}: 请输入有效的浮点数")
# 解析初始状态 (2,) 数组
try:
# 处理类似 "[10000;-300]" 或 "[10000, -300]" 的输入格式
values = params["init_state"].strip("[]").replace(";", ",").split(",")
parsed["init_state"] = np.array([float(v.strip()) for v in values], dtype=float) # v.strip()用于移除字符串开头和结尾的特定字符
if parsed["init_state"].shape != (2,):
raise ValueError("需要包含两个元素的数组")
except Exception as e:
errors.append(f"init_state: {str(e)} (格式应为 [值1, 值2])")
# 解析协方差矩阵 (2,) 数组
try:
# 处理类似 "[100,1]" 或 "[100;1]" 的输入格式
values = params["P_matrix"].strip("[]").replace(";", ",").split(",")
parsed["P_matrix"] = np.array([float(v.strip()) for v in values], dtype=float) # v.strip()用于移除字符串开头和结尾的特定字符
if parsed["P_matrix"].shape != (2,):
raise ValueError("需要包含两个元素的数组")
except Exception as e:
errors.append(f"P_matrix: {str(e)} (格式应为 [值1, 值2])")
# 解析信息矩阵 (2,2) 数组
try:
# 处理类似 "[0,0;0,0]" 的输入格式
rows = params["info_matrix"].strip("[]").split(";")
parsed["info_matrix"] = np.array(
[[float(v) for v in row.split(",")] for row in rows],
dtype=float
)
if parsed["info_matrix"].shape != (2, 2):
raise ValueError("需要2x2的数组格式")
except Exception as e:
errors.append(f"info_matrix: {str(e)} (格式应为 [值1,值2;值3,值4])")
return parsed, errors
def run_simulation(self):
"""执行仿真按钮点击事件处理"""
# 收集标志位参数
flags = {
"method_flag": self.method_flag,
"save_fig_flag": self.save_fig_flag,
"save_data_flag": self.save_data_flag,
"save_data_time_flag": self.with_time_flag
}
# 收集文本框参数
params_txt = self.get_lineedit_values()
# 解析数值参数
params, errors = self.parse_numeric_params(params_txt)
# 检查是否有解析错误
if errors:
error_msg = "参数解析错误:\n" + "\n".join(errors)
QMessageBox.critical(self, "参数错误", error_msg)
return
# 打印所有参数(实际应用中可替换为仿真计算逻辑)
# print("\n===== 仿真参数设置 =====")
# print("滤波方法:", flags["method_flag"])
# print("保存图表:", flags["save_fig_flag"])
# print("保存数据:", flags["save_data_flag"])
# print("数据带时间戳:", flags["save_data_time_flag"])
# print("\n===== 仿真具体参数 =====")
# print("仿真时长:", params["simu_time"])
# print("采样时长:", params["sample_time"])
# print("初始状态:\n", params["init_state"])
# print("过程噪声:", params["process_noise"])
# print("协方差矩阵:\n", params["P_matrix"])
# print("量测噪声:", params["measure_noise"])
# print("信息矩阵:\n", params["info_matrix"])
print("===== 开始仿真计算 =====")
# 仿真参数
T = params["simu_time"] # 仿真时长
Ts = params["sample_time"] # 采样时长
Q = params["process_noise"] * Ts # 过程噪声
R = params["measure_noise"] # 量测噪声
# 生成噪声序列
W = np.sqrt(Q) * np.random.randn(1, T)
V = np.sqrt(R) * np.random.randn(1, T)
p0 = params["P_matrix"] # 初始协方差阵参数
P0 = np.diag([p0[0], p0[1]]) # 初始协方差阵
I0 = params["info_matrix"] # 初始信息阵设置为0
# 系统矩阵
A = np.array([[0, 1], [0, 0]]) # 状态矩阵
I = np.eye(2) # 单位阵
Phi = I + A * Ts # 离散化
H = np.array([[1, 0]]) # 量测矩阵
Gamma = np.array([[0], [1]])
# 设置滤波维度
nS = 2 # 状态维度
nZ = 1 # 观测维度
# 分配空间
x_state = np.zeros((nS, T)) # 系统真实值
z_mea = np.zeros((nZ, T)) # 系统观测值
x_KF = np.zeros((nS, T)) # 卡尔曼滤波状态值
# 赋初值
x_state[:, 0] = params["init_state"] # 系统状态初值
z_mea[:, 0] = np.dot(H, x_state[:, 0]) # 系统观测初值
x_KF[:, 0] = x_state[:, 0] # 卡尔曼滤波器估计初值
# 02 用模型模拟真实状态
for t in range(1, T):
x_state[:, t] = np.dot(Phi,x_state[:, t-1]) + np.dot(Gamma, W[0, t]).squeeze()
z_mea[:, t] = np.dot(H, x_state[:, t]) + V[0, t]
# 03-1 Kalman滤波
if self.method_flag == '请选择滤波方式':
mode = 'null'
print("请先选择滤波方法!")
QMessageBox.warning(self, "操作提示", "请先选择滤波方法!", QMessageBox.Ok)
return # 终止仿真流程
# #下述代码为KF滤波方法
# mode = 'null'
# mode_str = 'KF'
# P0_kf = P0.copy() # 复制初始P0
# for t in range(1, T):
# x_KF[:, t], P0_kf = KF(x_KF, P0_kf, z_mea, Phi, Gamma, H, Q, R, I, t)
# # 画图
# filter_plot(x_state, z_mea, x_KF, None, None, None, None, T, mode, self.save_fig_flag, mode_str)
# 04-1 习题1:信息滤波
elif self.method_flag == '信息滤波':
mode = 'Problem 1'
mode_str = 'IF'
# 分配空间并赋予滤波器变量初值
s_IF = np.zeros((nS, T)) # 信息滤波状态值
x_IF = np.zeros((nS, T))
s_IF[:, 0] = np.dot(I0, x_state[:, 0]) # 信息滤波器赋估计初值
Phi_inv = np.linalg.pinv(Phi) # 先求逆,减少计算量
Q_inv = 1/Q
R_inv = 1/R
# 重新初始化I0为协方差阵的逆
I0 = np.linalg.inv(P0.copy())
for t in range(1, T):
M_k_1 = np.dot(np.dot(Phi_inv.T, I0), Phi_inv)
N_k_1 = np.dot(np.dot(np.dot(M_k_1, Gamma), np.linalg.pinv(np.dot(np.dot(Gamma.T, M_k_1), Gamma) + Q_inv)), Gamma.T)
S_pre = np.dot((I - N_k_1), np.dot(Phi_inv.T, s_IF[:, t-1]))
I_pre = np.dot((I - N_k_1), M_k_1)
s_IF[:, t] = S_pre + np.dot(H.T, np.dot(R_inv, z_mea[:, t]))
I0 = I_pre + np.dot(H.T, np.dot(R_inv, H))
x_IF[:, t] = np.dot(np.linalg.pinv(I0), s_IF[:, t])
# 画图
filter_plot(x_state, z_mea, x_KF, x_IF, None, None, None, T, mode, self.save_fig_flag, mode_str)
print("滤波方法:", flags["method_flag"])
# 04-2 习题2:UD滤波
elif self.method_flag == 'UD滤波':
mode = 'Problem 2'
mode_str = 'UD'
# 分配空间并赋予滤波器变量初值
x_UD = np.zeros((nS, T)) # UD滤波状态值
x_UD[:, 0] = x_state[:, 0] # UD滤波器赋估计初值
P0_ud = np.diag([10**2, 1**2]) # 初始协方差阵
for t in range(1, T):
# 时间更新
xUD_pre = np.dot(Phi, x_UD[:, t-1])
U, D = udu(P0_ud) # 将协方差阵作UD分解
U, D = UD_update(U, D, Phi, Gamma, Q, H, R, 'T') # 时间更新
P_pre = np.dot(np.dot(U, np.diag(D.flatten())), U.T)
# 量测更新
K = np.dot(np.dot(P_pre, H.T), np.linalg.pinv(np.dot(np.dot(H, P_pre), H.T) + R))
x_UD[:, t] = xUD_pre + np.dot(K, (z_mea[:, t] - np.dot(H, xUD_pre)))
U, D = udu(P_pre) # 将一步预测协方差阵作UD分解
U, D = UD_update(U, D, Phi, Gamma, Q, H, R, 'M') # 测量更新
P0_ud = np.dot(np.dot(U, np.diag(D.flatten())), U.T)
# 画图
filter_plot(x_state, z_mea, x_KF, None, x_UD, None, None, T, mode, self.save_fig_flag, mode_str)
print("滤波方法:", flags["method_flag"])
# 04-3 习题3:遗忘滤波
elif self.method_flag == '遗忘滤波':
mode = 'Problem 3'
mode_str = 'FD'
# 根据题设条件,设置初始化参数
a = 1 # 加速度(m/s^2),减速机动,因为速度为负,所以这里符号为正
acc = np.dot(np.array([0.5*Ts**2, Ts]), a) # 构造矩阵
t_100 = 100 # 时间(s),导弹在第100秒时,减速机动
t_200 = 200 # 时间(s),导弹在第200秒后,停止减速机动,进入匀速运动
# 根据题设条件,用模型模拟真实状态
for t in range(1, T):
if t < t_100 or t >= t_200:
x_state[:, t] = np.dot(Phi, x_state[:, t-1]) + np.dot(Gamma, W[0, t]).squeeze()
else:
x_state[:, t] = np.dot(Phi, x_state[:, t-1]) + acc + np.dot(Gamma, W[0, t]).squeeze()
z_mea[:, t] = np.dot(H, x_state[:, t]) + V[0, t]
# 分配空间并赋予滤波器变量初值
s = 1.1 # 渐消因子
x_KF = np.zeros((nS, T)) # 卡尔曼滤波状态值
x_KF[:, 0] = x_state[:, 0] # 卡尔曼滤波器估计初值
x_FD = np.zeros((nS, T)) # 遗忘滤波状态值
x_FD[:, 0] = x_state[:, 0] # 遗忘滤波器赋估计初值
# 再做一次卡尔曼滤波
P0_kf = np.diag([10**2, 1**2]) # 重新设置初始P0
for t in range(1, T):
x_KF[:, t], P0_kf = KF(x_KF, P0_kf, z_mea, Phi, Gamma, H, Q, R, I, t)
# 遗忘滤波
P0_fd = np.diag([10**2, 1**2]) # 重新设置初始P0
for t in range(1, T):
# 时间更新
xFD_pre = np.dot(Phi, x_FD[:, t-1])
P_pre = np.dot(np.dot(Phi, s * P0_fd), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T)
# 量测更新
K = np.dot(np.dot(P_pre, H.T), np.linalg.pinv(np.dot(np.dot(H, P_pre), H.T) + R))
x_FD[:, t] = xFD_pre + np.dot(K, (z_mea[:, t] - np.dot(H, xFD_pre)))
P0_fd = np.dot((I - np.dot(K, H)), P_pre)
# 画图
filter_plot(x_state, z_mea, x_KF, None, None, x_FD, None, T, mode, self.save_fig_flag, mode_str)
print("滤波方法:", flags["method_flag"])
# 04-4-1 习题4(1)
elif self.method_flag == '自适应遗忘滤波(1)':
mode = 'Problem 4-1'
mode_str = 'FT1'
R_1s = 100 # 量测噪声方差为100m^2
R_100s = 10000 # 量测噪声方差为10000m^2
# 构造量测噪声序列
V = np.zeros((1, T))
V[0, :100] = np.sqrt(R_1s) * np.random.randn(100) # 1-100s,方差为100m^2
V[0, 100:] = np.sqrt(R_100s) * np.random.randn(T-100) # 100s之后,方差为10000m^2
# 根据题设条件,用模型模拟真实状态
for t in range(1, T):
if t == 150: # 在150s时出现量测故障导致雷达输出为0
z_mea[:, t] = 0
else:
z_mea[:, t] = np.dot(H, x_state[:, t]) + V[0, t]
# 再做一次卡尔曼滤波
P0_kf = np.diag([10**2, 1**2]) # 重新设置初始P0
for t in range(1, T):
# 时间更新
xKF_pre = np.dot(Phi, x_KF[:, t-1])
P_pre = np.dot(np.dot(Phi, P0_kf), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T)
# 量测更新
K = np.dot(np.dot(P_pre, H.T), np.linalg.pinv(np.dot(np.dot(H, P_pre), H.T) + R_1s))
x_KF[:, t] = xKF_pre + np.dot(K, (z_mea[:, t] - np.dot(H, xKF_pre)))
P0_kf = np.dot((I - np.dot(K, H)), P_pre)
# 分配空间并赋予滤波器变量初值
x_fault = np.zeros((nS, T)) # 自适应遗忘滤波状态值
x_fault[:, 0] = x_state[:, 0] # 自适应遗忘滤波器赋估计初值
beta = np.zeros(T)
beta[0] = 1
b = 0.999 # 渐消因子
C = np.dot(np.dot(H, (np.dot(np.dot(Phi, P0), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T))), H.T) + R # 新息序列方差阵
zNew = 15
# 量测噪声方差自适应滤波处理
for t in range(1, T):
# 时间更新
xFault_pre = np.dot(Phi, x_fault[:, t-1]) # 状态一步预测
P_pre = np.dot(np.dot(Phi, P0), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T) # 协方差一步预测
# 量测更新
beta[t] = beta[t-1] / (beta[t-1] + b) # 更新新息序列方差阵的系数
C = (1 - beta[t]) * C + beta[t] * (zNew * zNew)
if abs(np.trace(C) / np.trace(np.dot(np.dot(H, P_pre), H.T) + R_1s)) > 2: # 量测故障检测与隔离
x_fault[:, t] = xFault_pre # 无需量测更新,估计值用时间更新值代替
P0 = P_pre
else:
alpha = np.trace(C - np.dot(np.dot(H, P_pre), H.T)) / np.trace(np.array([[R_1s]])) # 将 R_1s 转换为 1x1 矩阵
K = np.dot(np.dot(P_pre, H.T), np.linalg.pinv(np.dot(np.dot(H, P_pre), H.T) + alpha * R_1s))
zNew = z_mea[:, t] - np.dot(H, xFault_pre)
x_fault[:, t] = xFault_pre + np.dot(K, zNew)
P0 = np.dot((I - np.dot(K, H)), P_pre)
# 画图
filter_plot(x_state, z_mea, x_KF, None, None, None, x_fault, T, mode, self.save_fig_flag, mode_str)
print("滤波方法:", flags["method_flag"])
# 04-4-2 习题4(2)
elif self.method_flag == '自适应遗忘滤波(2)':
mode = 'Problem 4-2'
mode_str = 'FT2'
R_1s = 100 # 量测噪声方差为100m^2
R_100s = 10 # 量测噪声方差为10m^2
# 构造量测噪声序列
V = np.zeros((1, T))
V[0, :100] = np.sqrt(R_1s) * np.random.randn(100) # 1-100s,方差为100m^2
V[0, 100:] = np.sqrt(R_100s) * np.random.randn(T-100) # 100s之后,方差为10m^2
# 根据题设条件,用模型模拟真实状态
for t in range(1, T):
z_mea[:, t] = np.dot(H, x_state[:, t]) + V[0, t]
# 再做一次卡尔曼滤波
P0_kf = np.diag([10**2, 1**2]) # 重新设置初始P0
for t in range(1, T):
# 时间更新
xKF_pre = np.dot(Phi, x_KF[:, t-1])
P_pre = np.dot(np.dot(Phi, P0_kf), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T)
# 量测更新
K = np.dot(np.dot(P_pre, H.T), np.linalg.pinv(np.dot(np.dot(H, P_pre), H.T) + R_1s))
x_KF[:, t] = xKF_pre + np.dot(K, (z_mea[:, t] - np.dot(H, xKF_pre)))
P0_kf = np.dot((I - np.dot(K, H)), P_pre)
# 分配空间并赋予滤波器变量初值
x_fault = np.zeros((nS, T)) # 自适应遗忘滤波状态值
x_fault[:, 0] = x_state[:, 0] # 自适应遗忘滤波器赋估计初值
beta = np.zeros(T)
beta[0] = 1
b = 0.999 # 渐消因子
C = np.dot(np.dot(H, (np.dot(np.dot(Phi, P0), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T))), H.T) + R # 新息序列方差阵
zNew = 15
# 量测噪声方差自适应滤波处理
for t in range(1, T):
# 时间更新
xFault_pre = np.dot(Phi, x_fault[:, t-1]) # 状态一步预测
P_pre = np.dot(np.dot(Phi, P0), Phi.T) + np.dot(np.dot(Gamma, Q), Gamma.T) # 协方差一步预测
# 量测更新
beta[t] = beta[t-1] / (beta[t-1] + b) # 更新新息序列方差阵的系数
C = (1 - beta[t]) * C + beta[t] * (zNew * zNew)
if abs(np.trace(C) / np.trace(np.dot(np.dot(H, P_pre), H.T) + R_1s)) > 2: # 量测故障检测与隔离
x_fault[:, t] = xFault_pre # 无需量测更新,估计值用时间更新值代替
P0 = P_pre
else:
alpha = np.trace(C - np.dot(np.dot(H, P_pre), H.T)) / np.trace(np.array([[R_1s]])) # 将 R_1s 转换为 1x1 矩阵
K = np.dot(np.dot(P_pre, H.T), np.linalg.pinv(np.dot(np.dot(H, P_pre), H.T) + alpha * R_1s))
zNew = z_mea[:, t] - np.dot(H, xFault_pre)
x_fault[:, t] = xFault_pre + np.dot(K, zNew)
P0 = np.dot((I - np.dot(K, H)), P_pre)
# 画图
filter_plot(x_state, z_mea, x_KF, None, None, None, x_fault, T, mode, self.save_fig_flag, mode_str)
print("滤波方法:", flags["method_flag"])
# 保存数据
if self.save_data_flag:
data_to_save = {
'x_state': x_state,
'z_mea': z_mea,
'xKF': x_KF,
'mode': mode,
'T': T,
'Ts': Ts,
'Q': Q,
'R': R
}
if mode == 'Problem 1':
data_to_save['xIF'] = x_IF
elif mode == 'Problem 2':
data_to_save['xUD'] = x_UD
elif mode == 'Problem 3':
data_to_save['xFD'] = x_FD
elif mode in ['Problem 4-1', 'Problem 4-2']:
data_to_save['xFault'] = x_fault
if self.with_time_flag:
# 获取当前日期
now = datetime.now()
date_str = now.strftime("%Y%m%d")
save_path = f'./data/{mode_str}_{date_str}.pkl'
else:
save_path = f'./data/{mode_str}.pkl'
# 使用pickle保存数据
with open(save_path, 'wb') as f:
pickle.dump(data_to_save, f, protocol=pickle.HIGHEST_PROTOCOL)
print(f"仿真结果已保存至: ./figures/")
print(f"数据已保存至: {save_path}")
print("===== 仿真计算结束 =====")
if __name__ == '__main__':
# NOTICE:01必须放在02前面
# 01-高分辨率屏幕控件自适应调整
QtCore.QCoreApplication.setAttribute(QtCore.Qt.AA_EnableHighDpiScaling) # 原有控件缩放,参考:https://zhuanlan.zhihu.com/p/401503085
# 02-应用程序初始化
app = QApplication(sys.argv)
# 03-高分辨率屏幕字体自适应调整
screen = app.primaryScreen() # 返回当前主显示器的信息
scale_factor = screen.logicalDotsPerInch() / 96 # 96dpi为标准缩放(100%),结果如1.75(175%缩放)
font = QtGui.QFont() # 创建默认字体
font.setPointSize(int(10 * scale_factor)) # 原字体10pt,乘以缩放因子
app.setFont(font)
# 04-创建并显示应用窗口
window = MainApp()
window.show()
sys.exit(app.exec_())四、总结
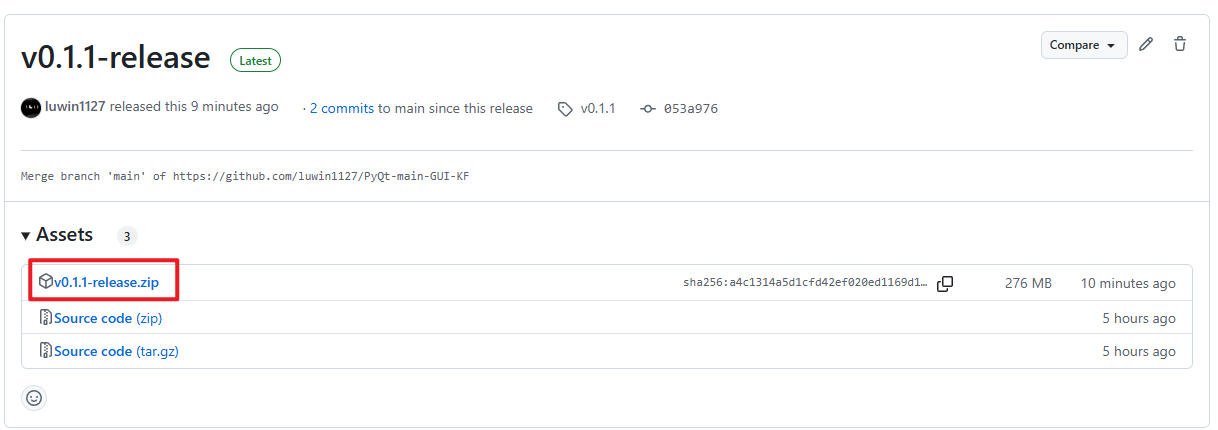
代码我放在了Github上,网址是:https://github.com/luwin1127/PyQt-main-GUI-KF.git。也打包了一个`.exe`文件,解压就可以用。
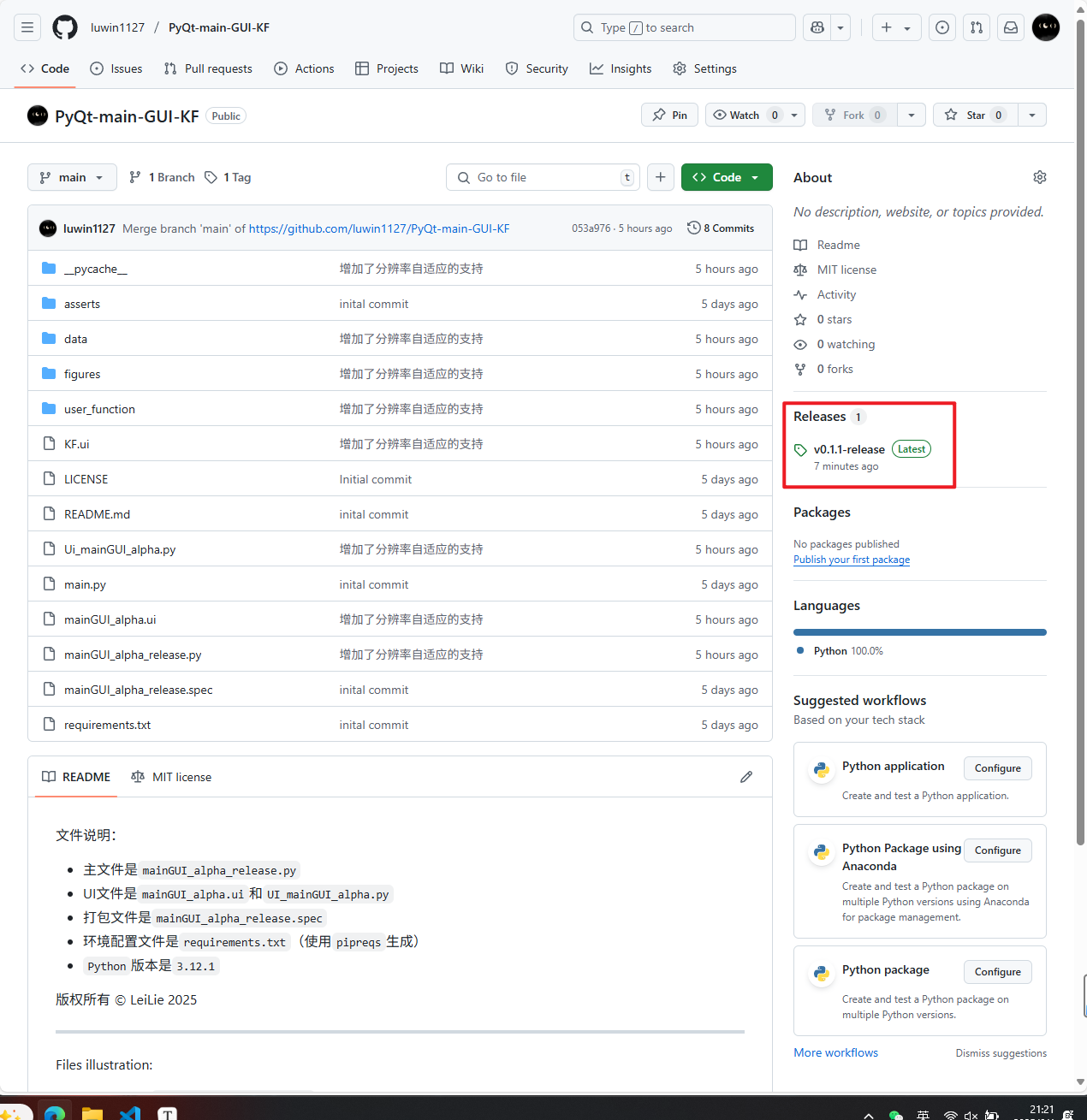
点击上图中红框的位置。进入下一个页面之后,选择v0.1.1-release.zip下载。
不足的地方:
- 没有使用
.qrc文件,因为还没学会; - 编辑
qss会让GUI更好看,使用了qt-material,不好看; - 使用
pyinstaller打包程序占用空间很大; - 考虑使用
Qt Fluent Design把各个控件美化一下。
参考文献
1 图形用户界面(GUI)开发教程EB/OL. (2024-01-20)2025-05-30https://leilie.top/2024-01-20/Study-GUI
2 王硕, 孙洋洋. PyQt5快速开发与实战电子书 M. 北京: 电子工业出版社, 2017.