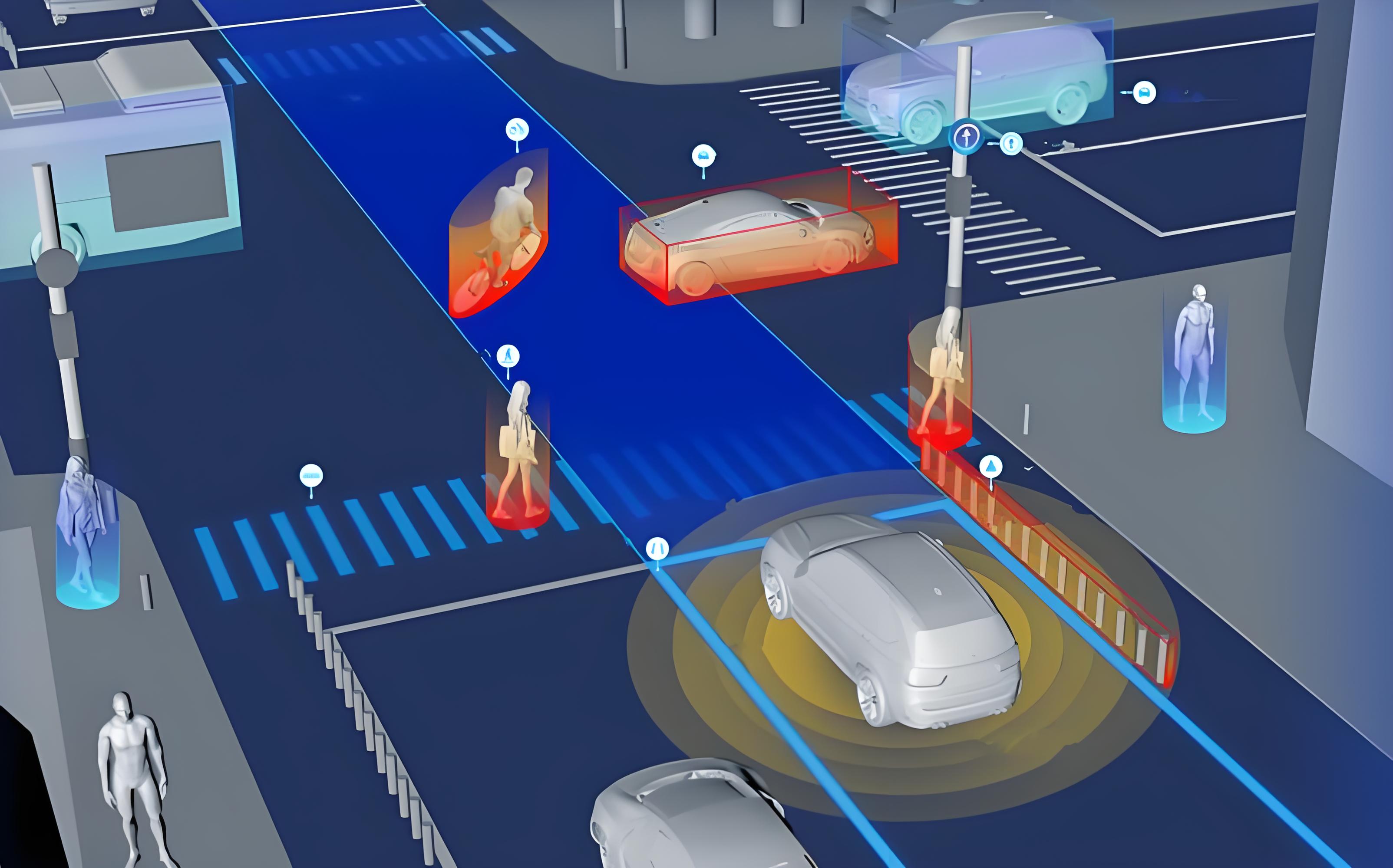
1.感知系统:复杂识别vs稳定检测
自动驾驶系统的"眼睛"就是它的感知模块,它通过摄像头、雷达、激光雷达等传感器识别周边环境。在乘用车中,由于环境变化极快,系统必须具备极强的感知能力。如在城市道路中,自动驾驶系统需要同时识别数十种交通标志、车道线状况、前方静止和动态障碍物、甚至要判断行人的意图(是否准备横穿马路),这对视觉处理算法和多传感器融合提出了极高要求。

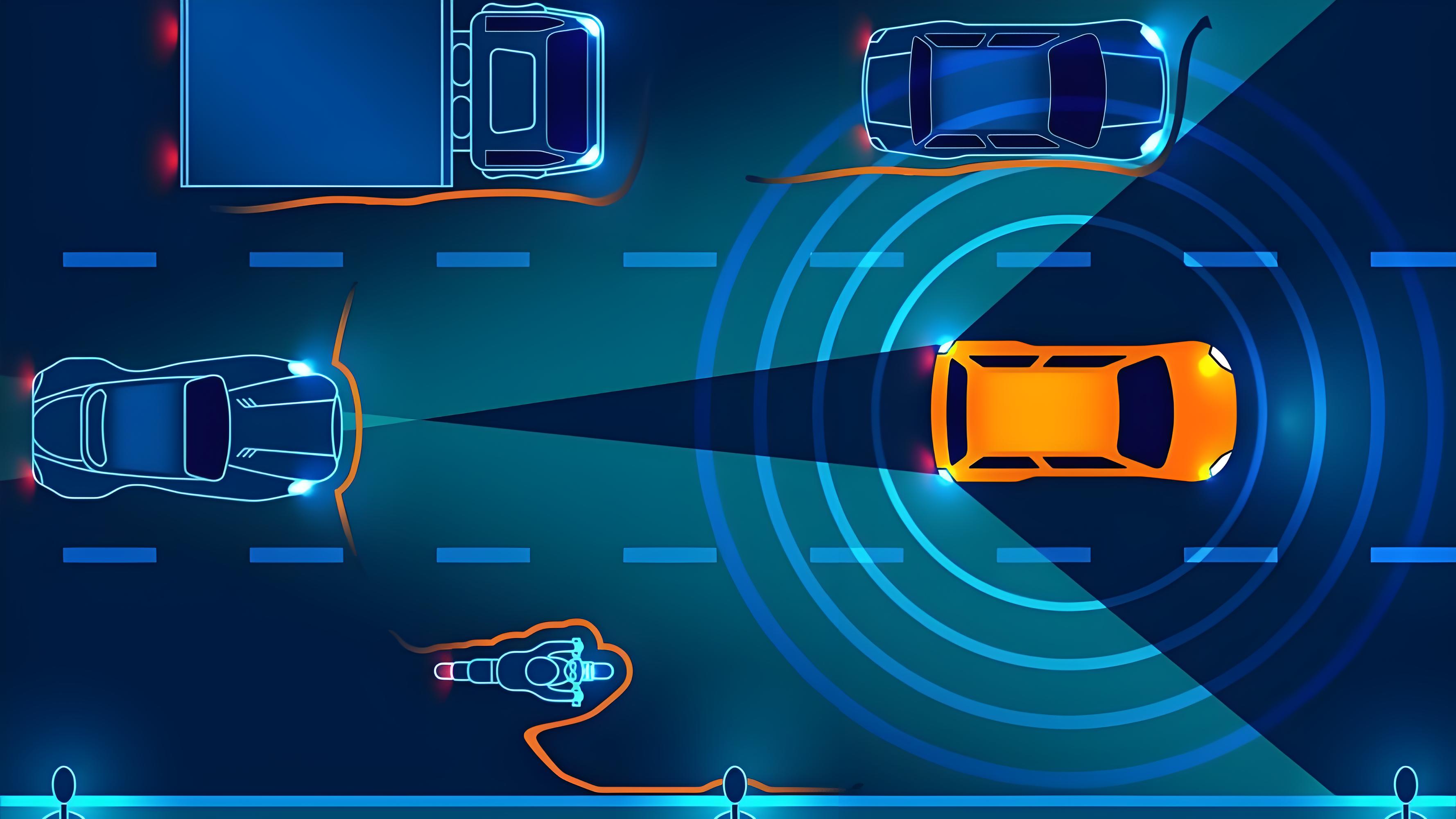
相比之下,矿区环境中的"感知难度"有所下降。矿山运输车辆的主要任务是沿特定路径前行、装载与卸载物料,周边的交通参与者极少。此时感知系统主要任务是检测前方道路是否通畅、有无巨石、陡坡或坑洼、是否到达装卸点等。因此,矿车自动驾驶系统的感知方案偏向于稳定性和鲁棒性,不强调高分辨率的语义识别,而是依赖更简单、抗干扰性强的激光雷达与毫米波雷达进行距离检测和障碍物规避。
对于干线物流卡车而言,由于其常年运行于高速公路等高车速场景,感知系统必须具备较强的远距离探测与高速目标追踪能力。特别是在车速达到80公里每小时以上的情况下,系统需要在200米甚至更远的距离内准确识别前方车辆、障碍物或突发事件,以预留足够的反应时间。相比家用车注重多样化目标识别,干线卡车更强调毫米波雷达的远距测距能力和对高速目标的稳定追踪,同时辅以激光雷达提升对静态障碍的识别精度,从而保障在高速行驶中也能及时做出安全决策。

2.应用场景:开放道路vs封闭场地
乘用车自动驾驶面对的是城市街道、高速公路等开放道路,未来更可能会涉及到农村小道,这些道路充满了复杂的交通参与者(行人、自行车、其他车辆)、不确定因素(红绿灯、突发路障、非标行为)以及变化频繁的路况与天气条件。因此,乘用车自动驾驶系统首先要具备强大的环境适应能力和极高的实时反应速度。

矿区和干线物流卡车常运行于相对"半封闭"或"结构化"的环境中。像是露天矿山运输作业就限定在矿区内部,交通参与者种类少,道路线性固定、坡度变化可控,运行节奏也偏慢,具备高度的可预测性。干线物流卡车常常以高速公路为主,道路相对标准化,突发事件较少。因此,矿区与干线卡车的自动驾驶系统更注重长时间、稳定性、载荷控制和运营效率,而不是处理高度复杂的交通交互。

3.定位系统:厘米级vs米级容忍度
乘用车的自动驾驶系统在城市中需要精准定位自己的位置,特别是在多车道或高架桥环境下,如果偏差过大,可能导致并错道、误判障碍物。因此,乘用车定位系统依赖高精度地图、RTK(实时动态差分GPS)、惯导(IMU)等多源融合,实现厘米级的定位精度。

矿区车辆的定位需求虽然也高,但由于环境相对可控,对精度的容忍度略高,特别是在矿车以较低速度运行时,容许一定误差范围。但同时,矿区往往通信条件差,GNSS信号遮挡频繁,导致系统更依赖于局部地图、视觉里程计等手段,或者部署地面基站进行辅助定位。
干线卡车则处于两者之间,虽然高速行驶需要较高的定位精度,但由于路径结构标准化,定位系统可以较大程度依赖GNSS与高精地图,因此具备较好的稳定性。对长途运营来说,关键是持续性和抗失效能力。
4.决策规划:应急响应vs路径优化
乘用车自动驾驶中最核心的挑战之一,是如何在动态环境中做出合理决策。系统必须随时根据红绿灯信号、周边车辆动态、限速信息、交通规则等制定行驶策略。例如在拥堵环境中,要判断是否并线、变道,或者在狭窄空间中控制车速与方向避障。这一切都需要"类人类"的驾驶逻辑,对行为预测与规划算法提出了极高要求。
矿区自动驾驶的规划路径则相对"机械化"。车辆在封闭路线中运行,规划通常是预先设定的,路径变化少,系统只需保证按计划路线准确执行,并在必要时暂停或调整运行速度。这种场景下的算法更加注重路径重用、效率最大化与能耗控制,而非临场决策。对于干线卡车,决策系统需要解决的是高速行驶状态下的变道超车、车距保持、进出匝道等问题。干线驾驶更多依赖V2X(车路协同)和高精地图的联合支持,实现"规规矩矩"而高效地运行,其核心是稳定、保守,而非灵活机动。

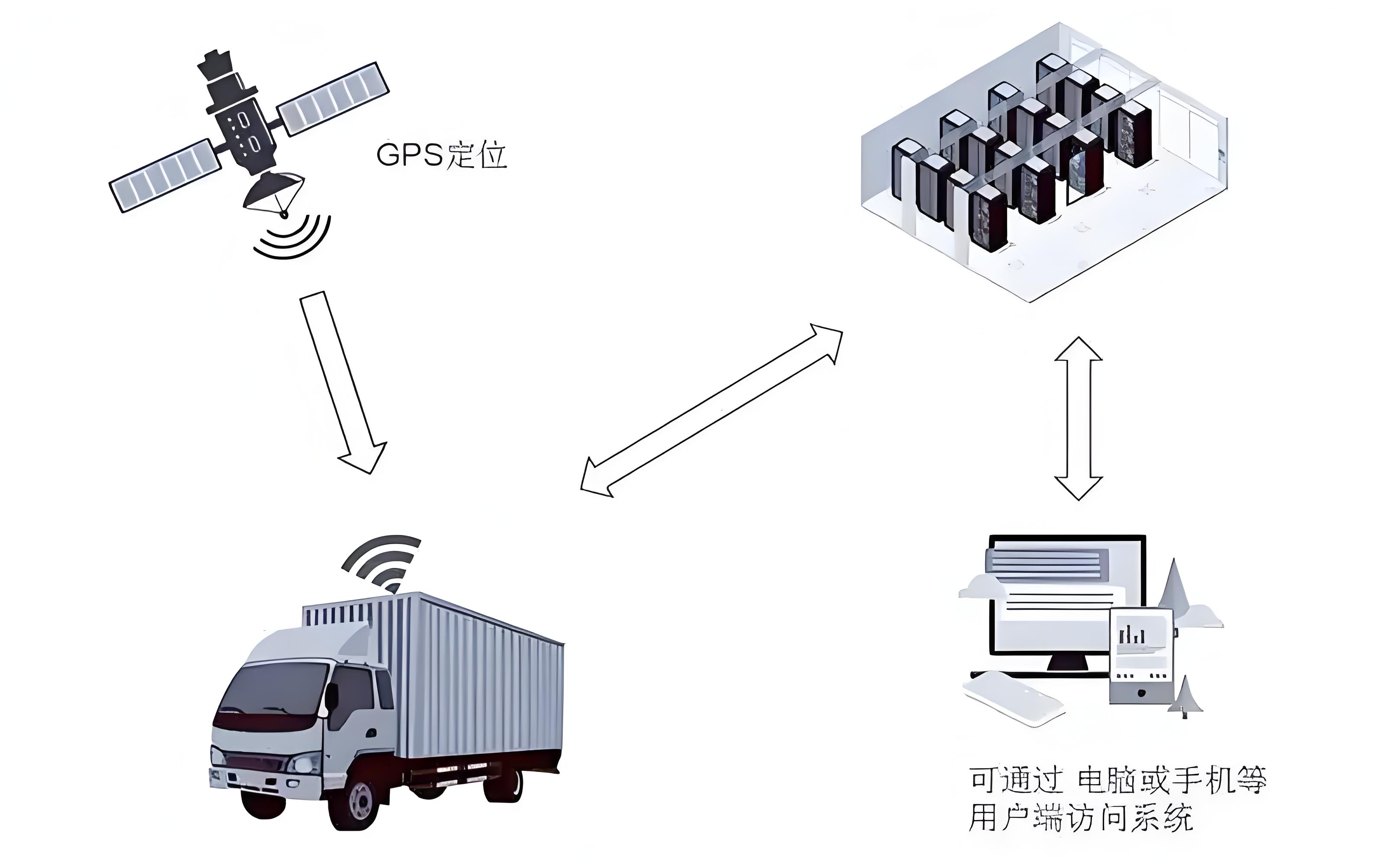
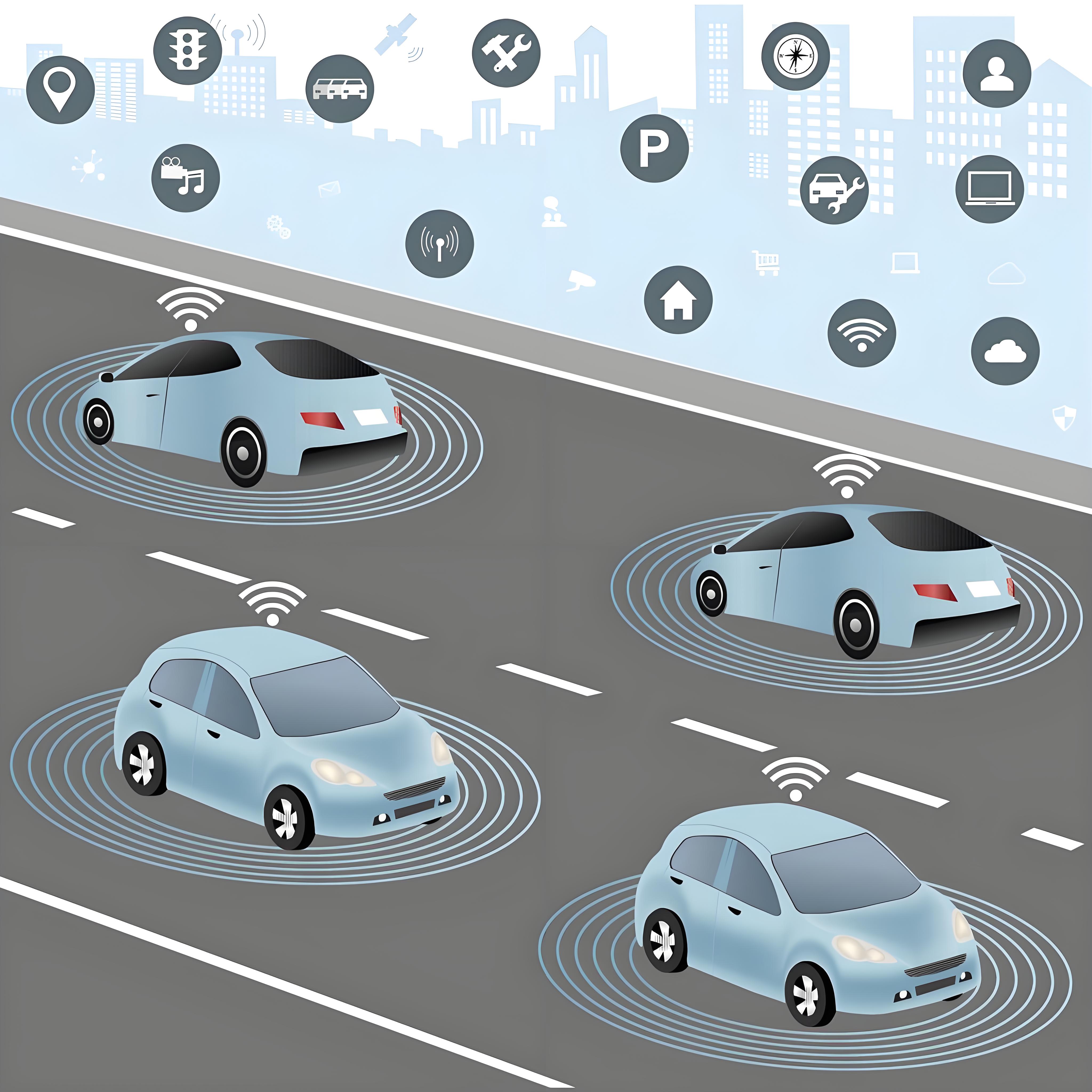
5.通信系统:V2X依赖程度不同
随着车路协同(V2X)技术的发展,自动驾驶不再局限于"车辆自闭环运作",而是与路侧单元(RSU)、交通信号、其他车辆共享信息。在乘用车中,V2X目前尚处于早期应用阶段,主要用于前向碰撞预警、红绿灯状态提示等辅助功能。
而矿区自动驾驶常常部署私有5G网络或WiFi通信系统,通过调度中心统一管理所有车辆,实现远程监控、路径指令、任务调整等功能。V2X是矿车自动驾驶运行的"中枢神经"。
卡车自动驾驶正成为车路协同落地的重要试点场景。通过高速公路V2X系统,干线卡车可以提前获取前方道路状态、坡度信息、限速数据等,提升整体运行效率和安全性。
6.安全与冗余设计:容错机制差异化
安全是自动驾驶永恒的主题,但不同场景对系统容错的要求截然不同。乘用车自动驾驶必须实现最高等级的安全保障,因为其服务于公众、运行在复杂城市道路中,容错机制必须全面覆盖,这其中就包括感知系统备份、电源系统冗余、关键芯片双备份等
矿车虽运行于封闭矿区,但事故造成的财产与人员损伤仍不可小觑。因此其控制系统多设计为"故障即停",并配备远程人工干预系统,即便出现系统崩溃也能迅速止车。同时,矿区可通过加强车辆之间的通信协调,降低碰撞风险。
干线卡车也极度重视冗余设计,尤其是在高速状态下,任何小故障都可能导致重大交通事故,因此在关键部件上(刹车、电控、转向)设置多重保险机制成为标配。
7.控制系统:舒适性vs稳定性
控制系统决定了自动驾驶车辆的行驶行为是否"像人类司机",尤其在乘用车中,舒适性是极其关键的指标。乘用车的自动驾驶控制策略需要做到起步平顺、转弯不急、刹车不突兀,否则即使再安全,也难以获得用户好感。这就要求控制系统要能实时响应复杂路况,同时实现高阶的人机交互。
 矿车自动驾驶的控制系统则更强调载重稳定性与设备保护。矿车往往自重几十吨,载重能力超百吨,其控制算法需要避免剧烈转向或制动,防止货物洒落、车体倾覆或机械磨损过快。同时,矿车的驾驶方式通常较为缓慢,系统可以使用更"稳妥"的控制模型。
矿车自动驾驶的控制系统则更强调载重稳定性与设备保护。矿车往往自重几十吨,载重能力超百吨,其控制算法需要避免剧烈转向或制动,防止货物洒落、车体倾覆或机械磨损过快。同时,矿车的驾驶方式通常较为缓慢,系统可以使用更"稳妥"的控制模型。
卡车作为干线物流主力,要求在高速行驶中实现高精度车道保持与车距控制,因此其控制系统主要围绕航向稳定性、制动响应时间与节油效率设计。此外,考虑到长时间运营的疲劳问题,一些系统还需支持多档位的智能巡航控制与自适应减速机制。

8.开发模式与测试体系:商品车vs工业车辆
乘用车的自动驾驶开发往往以"规模量产"为目标,强调低成本、高集成、良好适配性,最终面向的是成千上万的消费者用户。因此,其测试体系包括大规模道路测试、虚拟仿真验证、用户实测反馈等。
矿区与卡车的自动驾驶开发路径更偏向"项目制交付",往往由特定厂商为某个矿区或物流线路定制开发,其迭代速度更快,但适用范围有限。测试阶段主要依赖场地测试与封闭模拟系统,少量路测验证。
