针对两个方向的长度远大于厚度的零部件,可以通过壳单元对其进行替代,本文主要针对手机后壳进行中面的抽取,并对充电器插入充电口过程进行简单静力学分析。
1.有限元仿真流程
1-1 前处理
1-1-1 几何模型构建
1-1-2 材料定义
1-1-3 有限元系统模型构建
1-2 求解
1-2-1 加载条件/边界条件
1-2-2 求解设置
1-2-3 大变形开关
1-3 后处理
1-3-1 查看结果
1-3-2 评估结果
1-3-3 修正结果
2.前处理
2.1几何模型的构建
打开ANSYS Workbench 2020 R2界面,创建静力学分析(Static Structural)工程项目。双击【Geometry】单元进入Design Modeler界面,导入如图1所示的模型,并且对其进行中面的抽取,如图2所示。
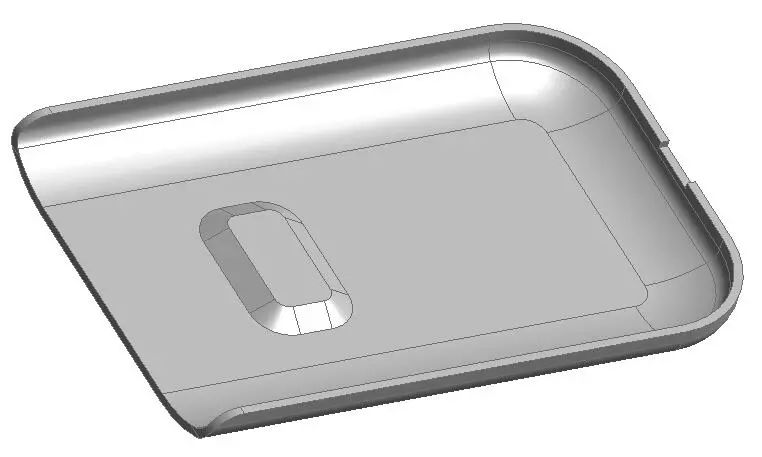
图1 模型导入

图2 抽取中面
2.2材料的定义
材料采用默认的结构钢,不需要重新进行定义。
2.3构建有限元系统模型
构建有限元系统模型主要包括7要素,如图3所示。
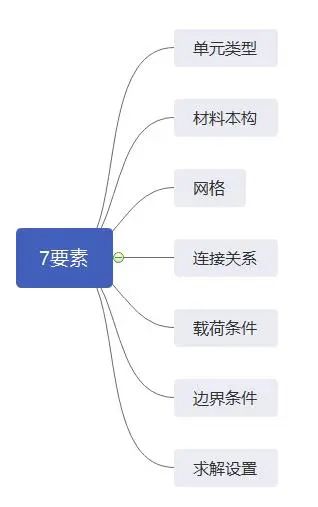
图3 七要素
具体流程及操作步骤如图4所示。
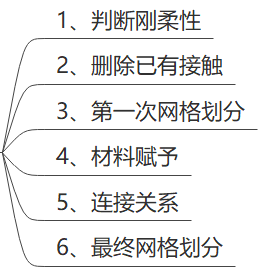
图4 操作流程
2.3.1判断刚柔性:均采用默认的柔性体。
2.3.2删除已有接触。
2.3.3第一次网格划分如图5所示。
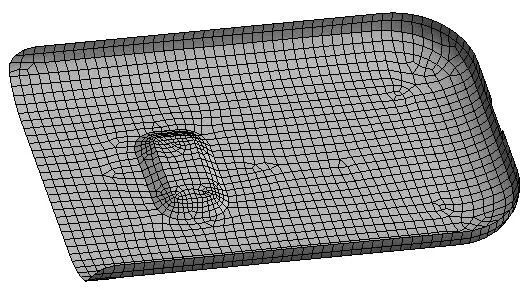
图5 第一次网格划分
2.3.4材料赋予:采用默认结构钢。
2.3.5连接关系设定:由于是单个体,不需要建立连接关系。
2.3.6最终网格划分如图6所示。
图6 最终网格划分
3.求 解
3.1设定边界条件
固定壳体一端,在充电口位置施加10N的力,如图7所示。
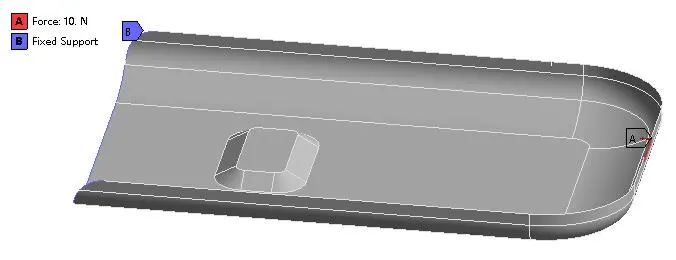
图7 设定边界条件
3.2求解设置
求解设置保持默认即可。
3.3大变形开关
大变形开关默认即可。
4.后处理
4.1 位移结果
其整体位移变化情况如图8所示,应力变化情况如图9所示。
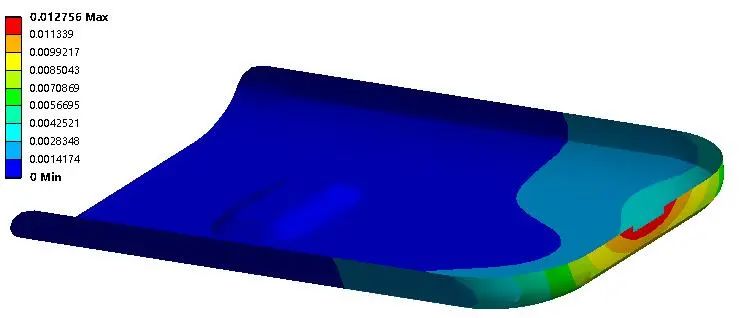
图8 位移云图
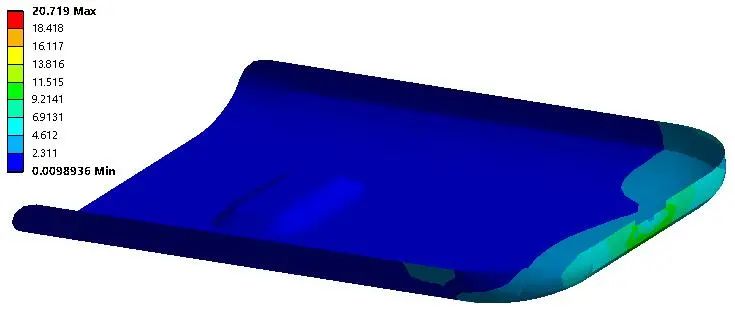
图9 应力云图