一、原理介绍
采用拓展卡尔曼滤波算法对IPMSM的dq轴电感、电阻和转子磁链进行在线参数辨识,由于欠秩问题,采用分步辨识,分别辨识Lq和转子磁链以及Ld和电阻。
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建EKF辨识仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
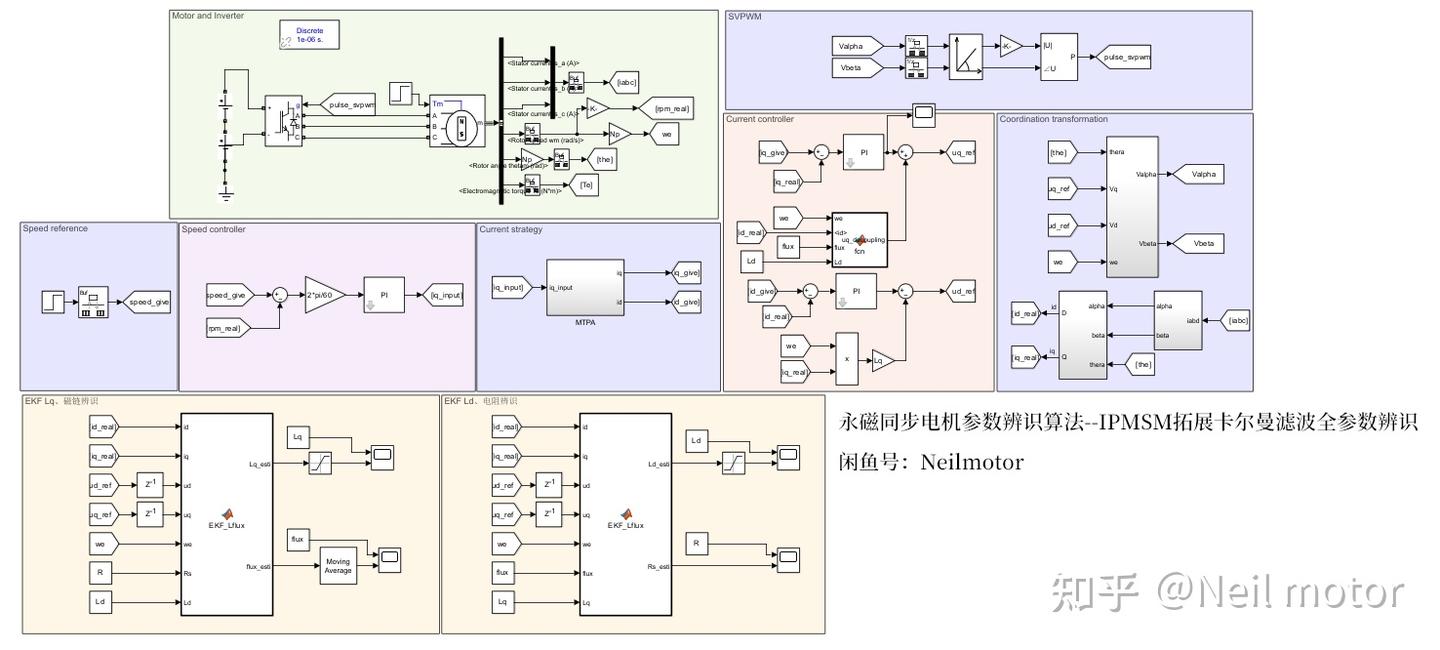
仿真工况:给定转速为1000rpm,启动时施加2Nm负载,0.5s时施加额定负载。
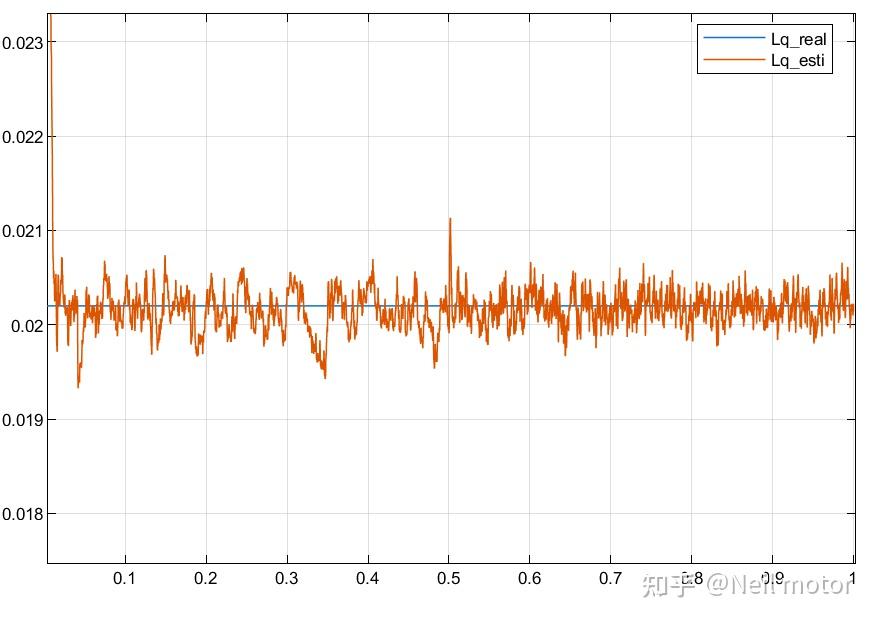
2.1 Lq辨识
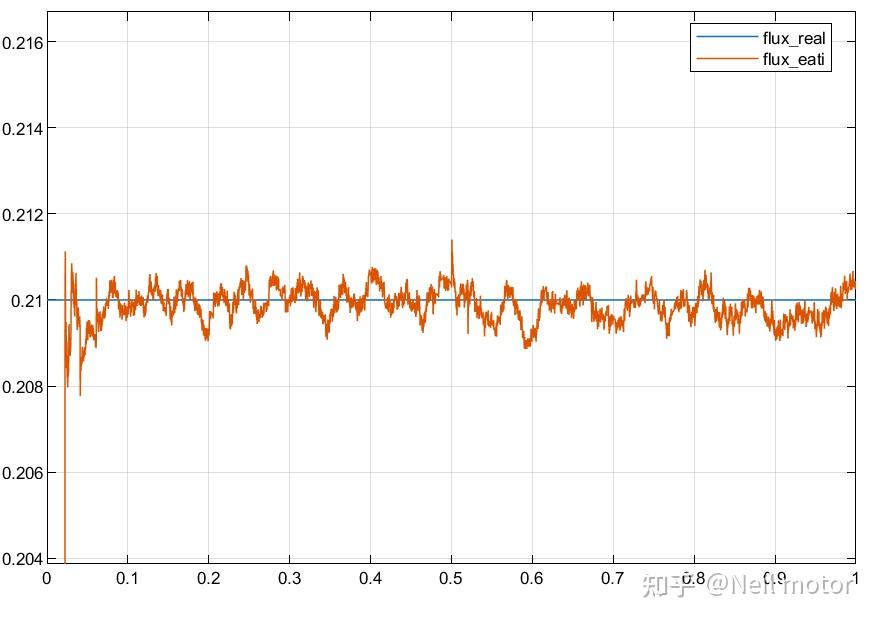
2.2 转子磁链辨识
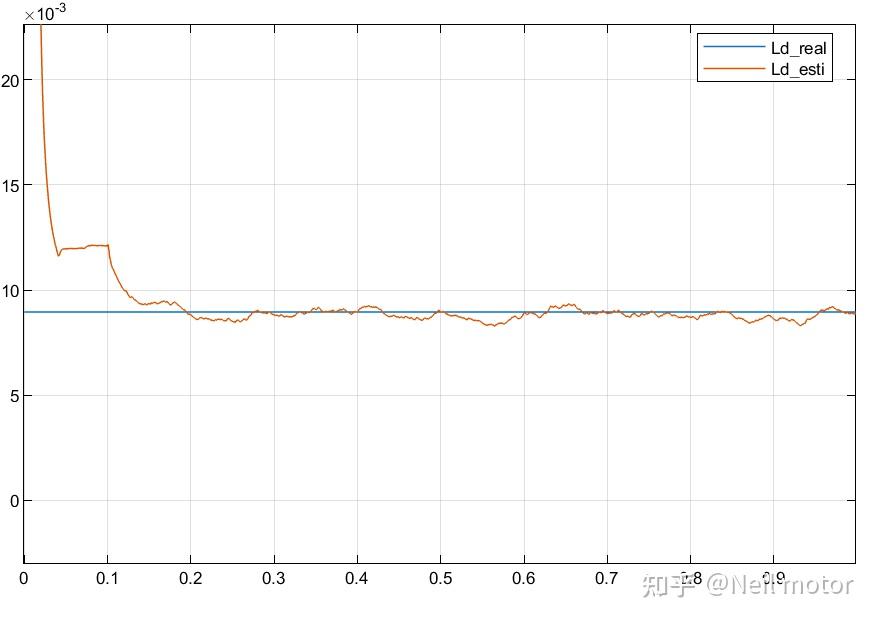
2.3 Ld辨识

可以看出Ld在线辨识在d轴电流较小时辨识不准确,在0.5s施加额定负载,d轴电流幅值到达1A以上后,开始收敛至真实值。
为了验证d轴电流幅值对辨识的影响,在0.1s施加额定负载。
可以看出在0.1s后Ld辨识参数迅速收敛至真实值。
2.4 电阻辨识
同样,先给出0.5s施加负载的波形。
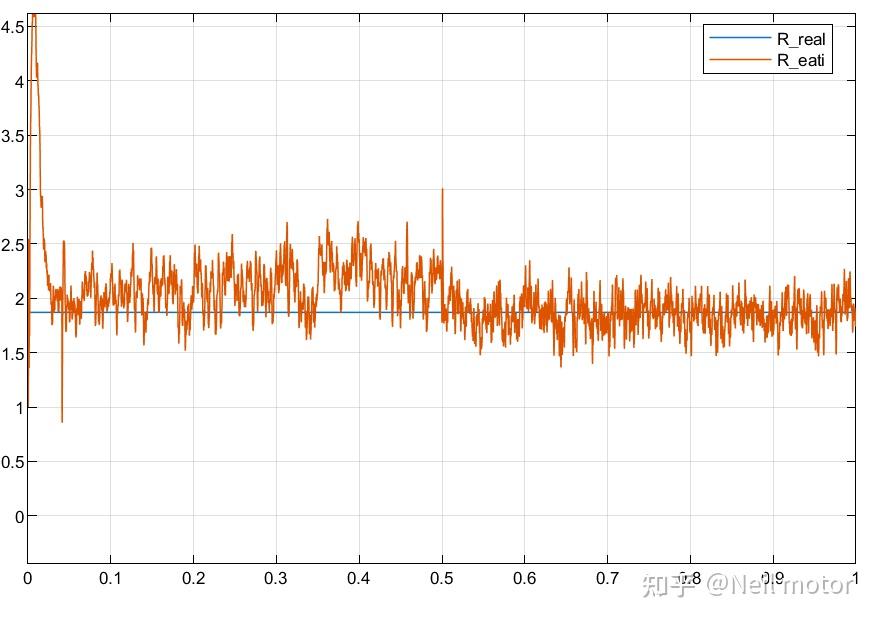
可以看出,在0.5s前收到Ld辨识不准的影响,电阻辨识也会出现一定误差。
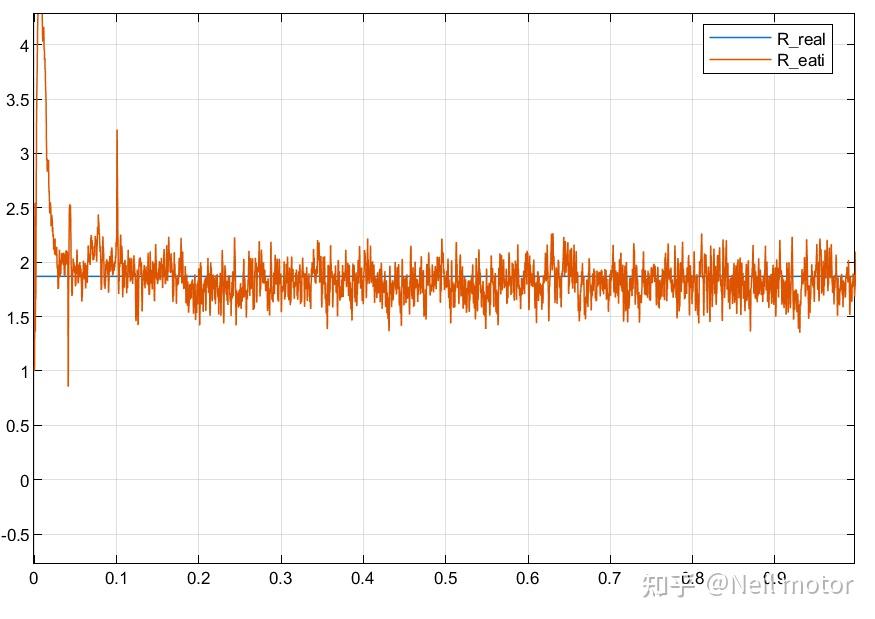
下图为0.1s施加负载的波形,可以看出辨识效果还是比较好的。
以上,验证了EKF对IPMSM全电气参数的辨识能力,Ld在空载时辨识效果差目前我没有找到更好的优化方案,最初以为是给定电压和实际电压间存在误差,后面对比了用电流计算出的实际电压和给定电压基本一致。也可能需要进一步优化EKF的矩阵参数,懒得再调了,好在加载后参数辨识效果还是可以的。