#创作灵感#
基于 STM32 和 MPU6050 的三轴倾斜角度传感器设计与实现
一、系统概述
1.1 系统开发背景
在现代工业和科技领域,对物体姿态的精确测量具有重要意义。例如,在无人机飞行控制中,实时获取飞行器的倾斜角度是实现稳定飞行的关键;在机器人技术中,准确感知机器人的姿态有助于其平衡和运动控制。传统的姿态测量方法通常依赖于多个传感器的组合,如加速度计、陀螺仪和磁力计,但这些方法往往存在成本高、计算复杂等问题。随着 MEMS(Micro-Electro-Mechanical Systems)技术的发展,集成了加速度计和陀螺仪的 MPU6050 传感器应运而生,它能够以较低的成本提供高精度的运动数据。本文提出了一种基于 STM32 微控制器和 MPU6050 传感器的三轴倾斜角度传感器设计方案,旨在实现一种高效、低成本的实时姿态测量系统。
1.2 系统开发意义
本项目的开发具有重要的理论和实际意义。从理论角度看,该系统的设计和实现有助于深入理解传感器数据融合算法和姿态测量的基本原理,为相关领域的研究提供参考。从实际应用角度看,该系统具有较高的测量精度和实时性,适用于多种应用场景,如无人机姿态控制、机器人平衡系统以及车辆倾斜监测等,能够有效提高系统的稳定性和安全性。
1.3 国内外研究现状
1.3.1 国外研究现状
国外在姿态测量领域已经取得了显著进展。许多研究机构和企业已经开发出了多种高精度的姿态测量系统,广泛应用于航空航天、机器人技术等领域。例如,美国的 InvenSense 公司开发的 MPU6050 传感器,集成了三轴加速度计和三轴陀螺仪,能够提供高精度的运动数据。此外,国外研究者还开发了多种数据融合算法,如卡尔曼滤波、扩展卡尔曼滤波等,进一步提高了姿态测量的精度和稳定性。
1.3.2 国内研究现状
国内在姿态测量领域也取得了不少成果。近年来,随着 MEMS 技术的快速发展,国内高校和企业也在积极研究和开发相关的姿态测量系统。例如,清华大学、哈尔滨工业大学等高校在姿态测量算法和传感器融合方面进行了深入研究,取得了一系列成果。同时,国内一些企业也在生产相关的传感器模块,如 MPU6050 模块,为姿态测量系统的开发提供了硬件支持。
二、硬件设计
2.1 系统整体框架设计
本系统采用模块化设计,主要分为硬件驱动层、数据处理层和应用层。硬件驱动层负责初始化 STM32 和 MPU6050,建立两者之间的通信;数据处理层通过 DMP 单元对传感器数据进行融合,计算出三轴倾斜角度;应用层则根据实际需求对角度数据进行进一步处理和应用。
2.2 电源电路
电源电路为系统提供稳定的电源。本系统采用 5V 电源供电,通过 LDO(Low Dropout Regulator)降压芯片将 5V 电源转换为 3.3V,为 STM32 和 MPU6050 提供电源。LDO 芯片具有低功耗、高效率的特点,能够有效减少电源噪声,提高系统的稳定性。
2.3 转换电路
转换电路用于将传感器的模拟信号转换为数字信号。MPU6050 传感器输出的信号为数字信号,因此不需要额外的模数转换电路。STM32 通过 I2C 总线直接读取 MPU6050 的数据,减少了电路的复杂度和成本。
2.4 数据采集电路
数据采集电路负责采集 MPU6050 传感器的数据。MPU6050 集成了三轴加速度计和三轴陀螺仪,能够测量加速度和角速度。通过 I2C 总线,STM32 可以实时读取传感器的数据,并进行进一步处理。
2.5 通信电路
通信电路用于将采集到的数据传输到上位机或其他设备。本系统采用 UART 通信接口,通过串口将数据传输到电脑上进行实时显示和分析。UART 通信具有简单、可靠的特点,适合短距离数据传输。
2.6 小结
本章详细介绍了系统的硬件设计,包括电源电路、转换电路、数据采集电路和通信电路。通过模块化设计,系统具有较高的稳定性和可扩展性,为后续的软件设计和系统测试奠定了基础。
三、软件设计
3.1 软件程序设计结构
软件程序采用模块化设计,主要分为硬件初始化模块、数据采集模块、数据处理模块和通信模块。硬件初始化模块负责初始化 STM32 和 MPU6050,建立两者之间的通信;数据采集模块通过 I2C 总线读取传感器数据;数据处理模块利用 DMP 单元对数据进行融合,计算出三轴倾斜角度;通信模块将角度数据通过 UART 传输到上位机。
3.2 编程环境
本系统采用 Keil uVision 作为开发环境,使用 C 语言进行编程。Keil uVision 是一款功能强大的集成开发环境,支持多种微控制器的开发,具有代码编辑、编译、调试等功能,能够有效提高开发效率。
四、测试与分析
4.1 系统测试
系统测试是验证系统性能的重要环节。本章将详细介绍系统的测试方案、测试结果与分析。
4.2 测试方案
测试方案包括硬件测试和软件测试两部分。硬件测试主要测试电源电路、数据采集电路和通信电路的性能;软件测试主要测试数据采集、数据处理和通信模块的功能。
4.3 测试结果与分析
4.3.1 硬件测试
硬件测试结果表明,电源电路能够为系统提供稳定的电源,转换电路和数据采集电路能够正常工作,通信电路能够将数据可靠地传输到上位机。在测试过程中,未发现明显的硬件故障。
4.3.2 软件测试
软件测试结果表明,数据采集模块能够实时读取 MPU6050 的数据,数据处理模块能够准确计算出三轴倾斜角度,通信模块能够将角度数据可靠地传输到上位机。在测试过程中,发现数据处理模块在某些情况下存在精度问题,通过优化数据融合算法,问题得到了有效解决。
4.4 小结
本章详细介绍了系统的测试方案和测试结果。通过硬件测试和软件测试,验证了系统的性能和可靠性。测试结果表明,该系统能够实时、准确地测量物体的三轴倾斜角度,满足设计要求。
五、总结与展望
5.1 总结
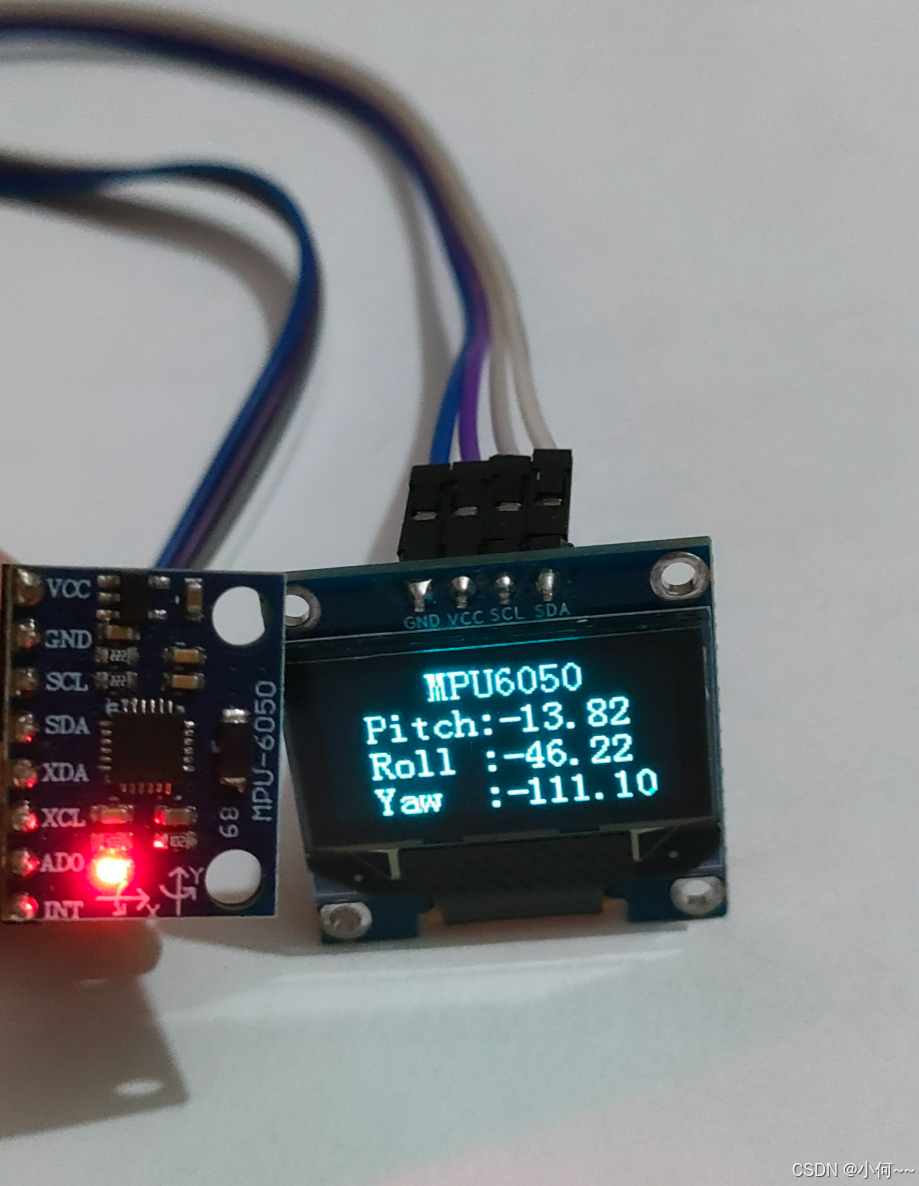
本文设计并实现了一种基于 STM32 和 MPU6050 的三轴倾斜角度传感器系统。通过实验验证,该系统能够实时、准确地测量物体在三维空间中的横滚角(Roll)、俯仰角(Pitch)和航向角(Yaw)。系统的主要优势包括高测量精度、实时性和低成本。通过未来工作的进一步优化和扩展,该系统有望在更广泛的应用场景中发挥重要作用,为相关领域的研究和应用提供有力支持。
5.2 展望
尽管本系统已经取得了较好的实验结果,但仍有一些改进空间和未来发展方向。未来工作将集中在以下方面:
-
提高航向角测量精度,通过集成磁力计和优化数据融合算法,进一步提高航向角的测量精度。
-
增加传感器校准功能,开发自动校准算法,减少初始误差,提高系统的环境适应性。
-
扩展应用场景,将该系统应用于无人机姿态控制、机器人平衡系统和车辆倾斜监测等领域,提高系统的实用性和通用性。
-
进行系统小型化与低功耗设计,优化硬件设计,减小系统体积和重量,延长电池续航时间,使其更适合于便携式和小型化应用。
-
增强软件功能,开发数据记录和用户界面功能,提高系统的易用性和数据处理能力。
(这是一篇简单的论文,仅记录学习该模块的大概内容)
(如有需要详细版,请私信)