JY901-ROS2驱动代码
驱动包
该驱动代码修改自:
https://github.com/ioio2995/witmotion_ros2
git clone https://github.com/ana52070/jy901_for_ros2.git下载后放入到自己的ubuntu中
sudo apt-get install libasio-dev
cd jy901_for_ros2
colcon build
source install/setup.bash
ros2 launch witmotion_ros2 witmotion_launch.py这样,雷达驱动就已经运行起来了。
如果报错,可以查看是否为配置不对:
sudo vim src/witmotion_ros2/config/witmotion.yaml
witmotion_node:
ros__parameters:
port: /dev/ttyUSB1
baud_rate: 115200 # baud
update_rate: 50.0 # Hz
topic_name: /witmotion
frame_id: base_link
imu_linear_acceleration_covariance: [0.0364, 0.0, 0.0, 0.0, 0.0048, 0.0, 0.0, 0.0, 0.0796]
imu_angular_velocity_covariance: [0.0663, 0.0, 0.0, 0.0, 0.1453, 0.0, 0.0, 0.0, 0.0378]
imu_orientation_covariance: [0.0479, 0.0, 0.0, 0.0, 0.0207, 0.0, 0.0, 0.0, 0.0041]
imu_temperature_variance: 0.01829
magnetometer_covariance: [0.000000187123, 0.0, 0.0, 0.0, 0.000000105373, 0.0, 0.0, 0.0, 0.000000165816]
magnetometer_temperature_variance: 0.01829
barometer_variance: 0.001如果USB不对,请检查设备树中USB的名称,如果CH340未安装可参考:
RVIZ2查看
首先安装imu插件
sudo apt install ros-ROS_DISTRO-rviz-imu-plugin然后启动rviz
rviz2点击add
找到下面的imu
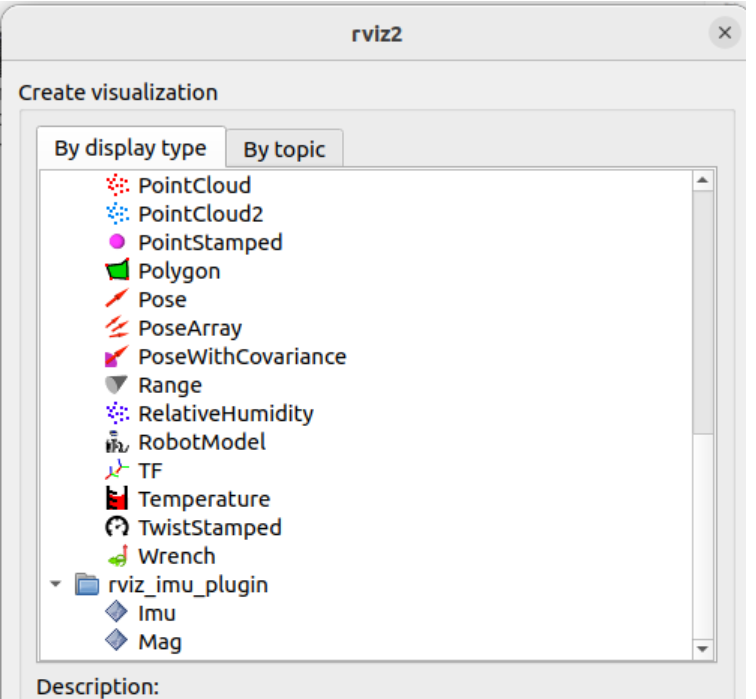
然后选择好对应的话题就可以了
最终效果: