Generalized Lightness Adaptation with Channel Selective Normalization(ICCV,2023)
- 专题介绍
- 一、研究背景
- 二、CSNorm方法
-
- [2.1 总体方案](#2.1 总体方案)
- [2.2 详细方案](#2.2 详细方案)
- 三、实验结果
- 四、总结
本文将对 Generalized Lightness Adaptation with Channel Selective Normalization ,这篇暗光增强算法进行讲解。参考资料如下:
专题介绍
在低光照环境下,传统成像设备往往因画面昏暗、细节丢失而受限。LLIE(低照度暗光增强)技术应运而生,它通过提升图像亮度、对比度,减少噪点并恢复色彩细节,让暗夜变得清晰可见。
LLIE技术从传统方法如直方图均衡化、Retinex模型等起步,近年来借助深度学习,尤其是卷积神经网络(CNN),GAN模型,扩散模型实现了质的飞跃。这些算法能自动学习图像特征,精准处理低光照图像,效果显著优于传统技术。
本专题将聚焦LLIE技术的核心原理、应用案例及最新进展,让我们一起见证LLIE如何点亮暗夜,开启视觉新视界!欢迎一起探讨交流!
系列文章如下
【1】ZeroDCE
【2】HVI
【3】CLIP-LIT
【4】GLARE
【6】SG-LLIE
【7】GPP-LLIE
【8】FusionNet
【9】EnligtenGAN
【10】PTG
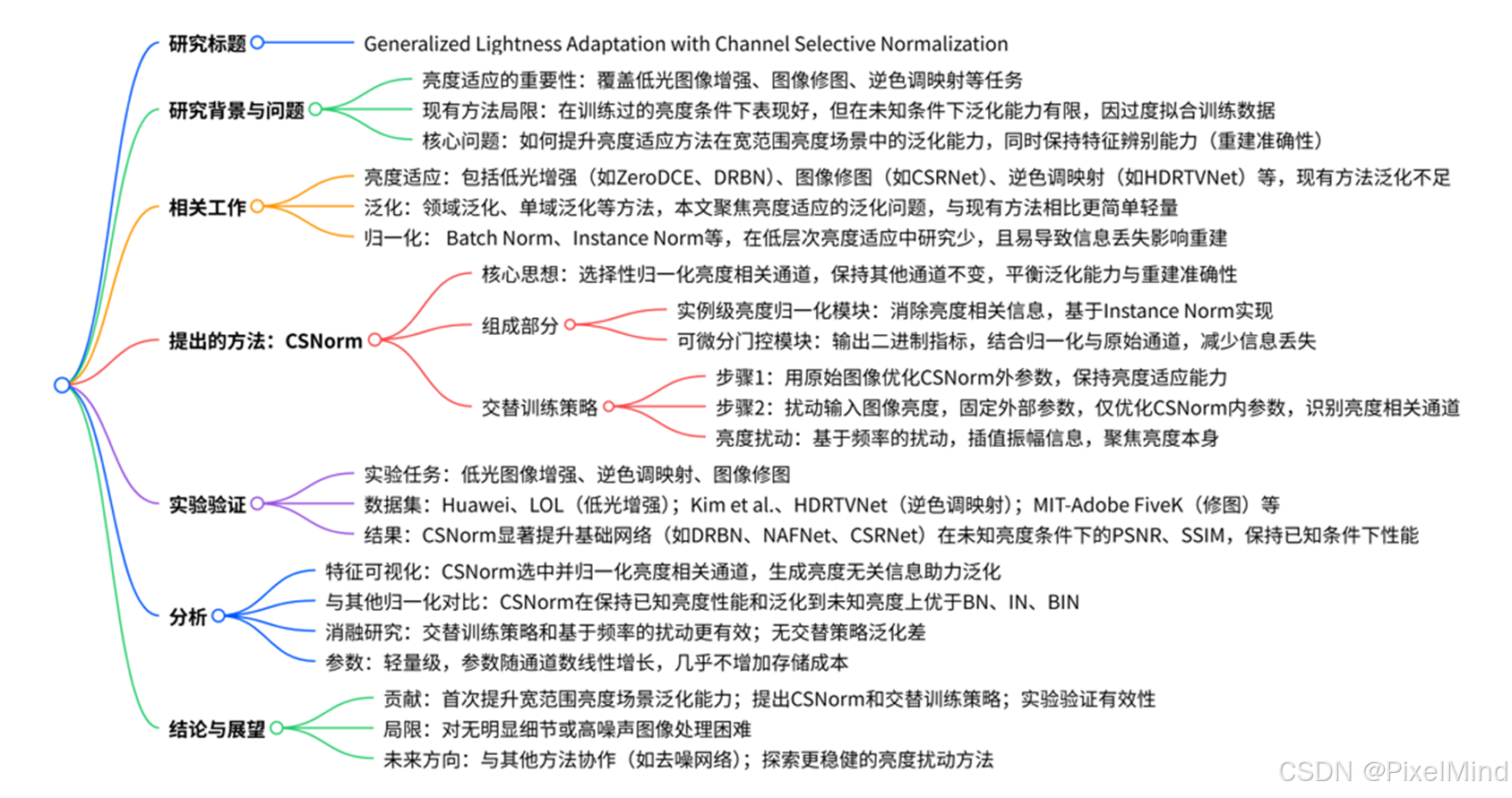
此论文总体框架如下:
一、研究背景
- 亮度适应对图像处理的成功至关重要,可避免意外的视觉质量下降,涵盖低光图像增强、图像修图和逆色调映射等多个方面。现有方法通常在其训练过的亮度条件下表现良好,但在未知亮度条件下由于泛化能力有限而表现不佳。
- 为解决这一局限,本文提出了一种新颖的广义亮度适应算法,通过通道过滤设计扩展了传统的归一化技术,称为通道选择性归一化(CSNorm)。所提出的CSNorm有针对性地归一化与亮度相关通道的统计信息,同时保持其他通道不变,以提高特征的泛化能力。为优化CSNorm,本文提出了一种交替训练策略,可有效识别与亮度相关的通道。
- 配备CSNorm的模型只需在一种亮度条件下训练,就能很好地泛化到未知的亮度条件。在多个基准数据集上的实验结果表明,CSNorm在增强现有亮度适应方法的泛化能力方面是有效的。
二、CSNorm方法
2.1 总体方案
动机:
- 归一化具有消除亮度相关成分和减少图像间差异的良好特性。它可以有效地减轻亮度的影响,并出色地提取与亮度无关的信息,这使得网络能够学习到稳健的表征,并提高泛化能力。
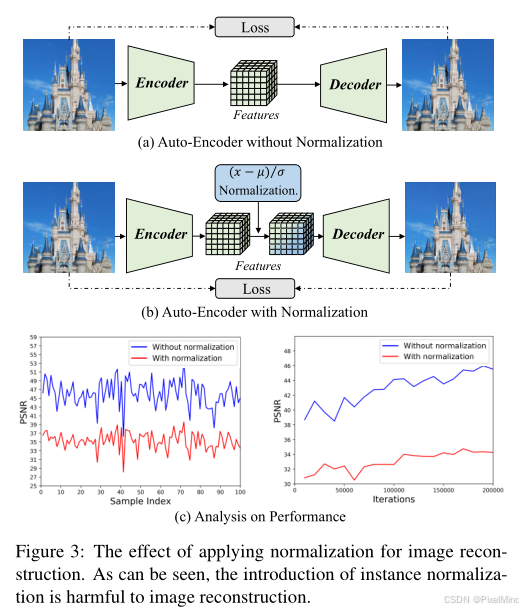
- 但是归一化也会带来信息损失:作者进行了一项自重建任务,以说明归一化引起的信息损失。如下所示,分别训练了两个自动编码器网络,一个插入了实例归一化(Instance Normalization, IN)操作,另一个未插入,并计算了不同图像上的相对重建精度(即峰值信噪比,PSNR)。很明显,归一化破坏了网络的重建能力,实际上,就泛化能力而言,归一化造成的信息损失带来的危害超过了其潜在的好处。这促使作者设计CSNorm,以有选择地对通道进行归一化,同时兼顾亮度自适应的泛化能力和重建精度。
方案:
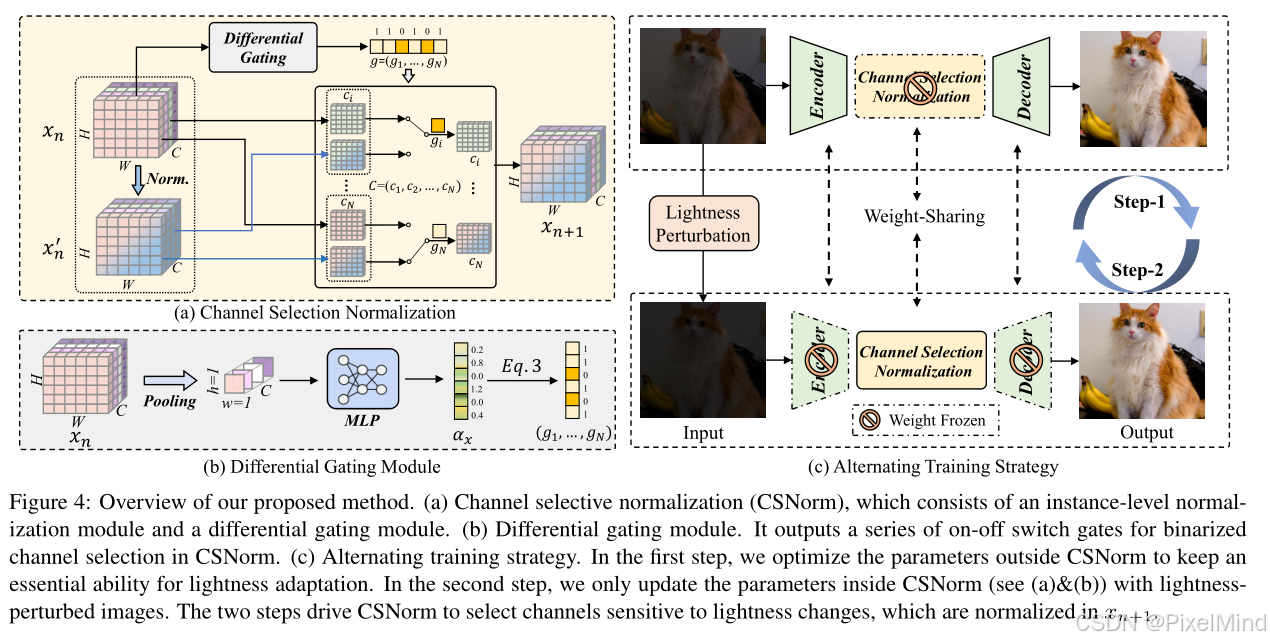
- 作者设计了CSNorm用于提升网络的泛化能力,它可作为即插即用模块应用于现有的亮度自适应网络。在CSNorm中,引入了一个可微门控模块(图b),以沿通道维度高效选择原始特征和归一化特征,然后将它们合并并传递到下一层。这样的门控模块实际上起到了通道选择功能。
- 此外,作者提出一种交替训练策略,以迫使门控模块选择与亮度相关的通道。在训练阶段,仅使用一个具有有限亮度条件的数据集,并配备作者提出的CSNorm的模型。一旦训练完成,该模型即可直接在其他未知的亮度条件下工作。
2.2 详细方案
2.2.1CSNorm
CSNorm由两部分组成:一个实例级亮度归一化模块,用于消除与光照相关的信息;以及一个可微门控模块,用于自适应选择与光照相关的通道。
实例级亮度归一化模块 :
实例归一化(Instance Normalization,IN):给定一个形状为 H × W × C H ×W ×C H×W×C的特征,实例归一化(IN)通过减去均值 μ ( x ) \mu(x) μ(x),再除以标准差 σ ( x ) \sigma(x) σ(x)来对x进行归一化,其表达式为
x ′ = I N ( x ) = γ x − μ ( x ) σ ( x ) + β , ( 1 ) x'=IN(x)=\gamma \frac{x-\mu(x)}{\sigma(x)}+\beta,\quad(1) x′=IN(x)=γσ(x)x−μ(x)+β,(1)
其中 μ ( x ) \mu(x) μ(x)和 σ ( x ) \sigma(x) σ(x)是针对每个通道和实例在空间维度上独立计算的,而 γ , β ∈ R C \gamma, \beta \in \mathbb{R}^{C} γ,β∈RC是从数据中学习得到的可缩放参数。由于实例归一化(IN)可以减少实例之间的亮度差异,归一化后的特征 x ′ x' x′具有与亮度条件无关的鲁棒表示,使网络能够适应各种亮度场景并提高其泛化能力。
可微门控模块 :
可微门控模块输出一系列二进制指示符,以组合归一化后的通道和原始通道,其可表示为
x n + 1 = ( 1 − g ) ⊙ x n + g ⊙ x n ′ . ( 2 ) x_{n+1}=(1-g) \odot x_{n}+g \odot x_{n}' . (2) xn+1=(1−g)⊙xn+g⊙xn′.(2)
其中g表示跨通道维度的二进制指示符,而 ⊙ \odot ⊙是逐通道相乘。门控操作通过二进制指示符激活或停用通道,以选择性地对通道进行归一化。
具体而言,将门控模块构建为如下表示
g = G ( α x ) = α x 2 α x 2 + ϵ , ( 3 ) g=G\left(\alpha_{x}\right)=\frac{\alpha_{x}^{2}}{\alpha_{x}^{2}+\epsilon},\quad(3) g=G(αx)=αx2+ϵαx2,(3)
其中 α x ∈ R C \alpha_{x} \in \mathbb{R}^{C} αx∈RC是由特征x生成的中间向量,而ϵ是一个小的正数。具体来说,为了得到 α x \alpha_{x} αx,首先采用自适应池化将x的空间大小缩小到单个像素,随后接几个带有ReLU激活函数的全连接层(图b)。 当出现 α x = 0 \alpha_{x}=0 αx=0时,显然会出现 G ( 0 ) = 0 G(0)=0 G(0)=0;当出现 α x ≠ 0 \alpha_{x} ≠0 αx=0时,由于ϵ足够小,可以推断出 G ( α x ) ≈ 1 G(\alpha_{x}) ≈1 G(αx)≈1。该函数将 α x \alpha_{x} αx转换为接近1或0的值,从而形成一个无需额外手动阈值设计的开关门。值得注意的是,由于该函数g的输出很容易为1(当 α x ≠ 0 \alpha_{x} ≠0 αx=0时),门控模块很容易陷入一种模式,即保持所有通道不变以保持重建精度。因此,作者让g与公式2中归一化后的通道 x ′ x' x′直接相乘,促使网络倾向于使用归一化后的通道,从而在模型的泛化能力与重建特征的判别能力之间保持良好的平衡。
2.2.2交替训练策略
该策略背后的基本原理是,通过轻微扰动输入图像的亮度,迫使CSNorm定位并滤除与亮度相关的通道,从而在原始图像和扰动图像上都实现最佳性能。
为了优化网络,根据参数是否属于CSNorm将其分为两组,并使用不同的损失函数来更新它们,如图c所示。
- 在第一步中,输入原始图像,并通过最小化损失函数来更新CSNorm之外的参数,其中 o ^ 1 \hat{o}{1} o^1是网络的输出图像,而 o g t o{g t} ogt是真实图像。通过这样做,网络基本的亮度适应能力得以保持,并且所有通道都保持其自然状态。
L 1 = ∣ o ^ 1 − o g t ∣ 2 , ( 4 ) \mathcal{L}{1}=\left|\hat{o}{1}-o_{g t}\right|_{2}, \quad(4) L1=∣o^1−ogt∣2,(4)
- 在第二步中,对输入图像的亮度进行扰动,并固定CSNorm之外的参数。换句话说,仅通过最小化损失函数来更新CSNorm中的参数。其中 o ^ 2 \hat{o}{2} o^2是输出,A表示频域中的幅度信息。这使得CSNorm能够自适应地选择与亮度相关的通道,以保持在扰动图像上的性能。具体而言,由于亮度与频域中的幅度相关,在公式5中添加幅度损失 ∣ A ( o ^ 2 ) − A ( o g t ) ∣ 2 |A(\hat{o}{2})-A(o_{g t})|_{2} ∣A(o^2)−A(ogt)∣2,以使网络能够更多地关注亮度信息并有效地选择与亮度相关的通道。
L 2 = ∣ o ^ 2 − o g t ∣ 2 + ∣ A ( o ^ 2 ) − A ( o g t ) ∣ 2 , ( 5 ) \mathcal{L}{2}=\left|\hat{o}{2}-o_{g t}\right|{2}+\left|\mathcal{A}\left(\hat{o}{2}\right)-\mathcal{A}\left(o_{g t}\right)\right|_{2},\quad(5) L2=∣o^2−ogt∣2+∣A(o^2)−A(ogt)∣2,(5)
以上两个过程交替训练。
2.2.3如何添加亮度扰动
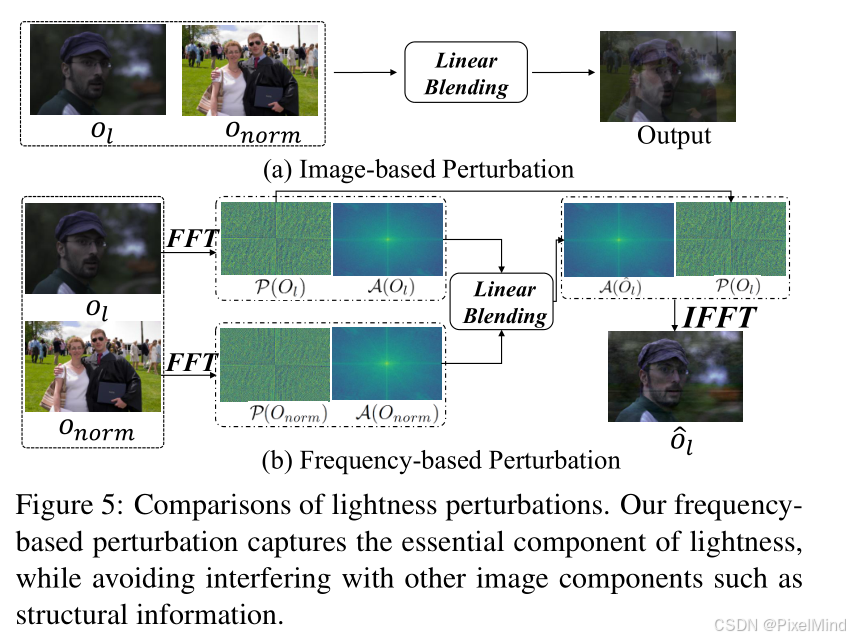
扰动应避免干扰其他图像成分,如结构信息。为实现这一点,作者提出一种基于频率的扰动方案,该方案对两幅图像的幅度进行线性插值,因为幅度信息包含更多的亮度信息,可防止增强伪影。
以低光增强任务为例,作者将低光图像和正常光图像定义为 o l o_{l} ol以及 o n o r m o_{norm} onorm ,及其傅里叶表示为 O l O_{l} Ol和 O n o r m O_{norm } Onorm。将 O l O_{l} Ol和 O n o r m O_{norm } Onorm的幅度分量线性组合为
A ( O ^ l ) = λ A ( O l ) + ( 1 − λ ) A ( O n o r m ) , ( 7 ) \mathcal{A}\left(\hat{O}{l}\right)=\lambda \mathcal{A}\left(O{l}\right)+(1-\lambda) \mathcal{A}\left(O_{norm }\right), \quad(7) A(O^l)=λA(Ol)+(1−λ)A(Onorm),(7)
其中 A 表示幅度信息, λ ∈ 0 , 1 \lambda \in0,1 λ∈0,1是随机采样的。然后,通过逆傅里叶变换 F − 1 F^{-1} F−1 将扰动图像 o ^ \hat{o} o^重建为 o ^ = F − 1 ( A ( O ^ l ) , P ( O l ) ) \hat{o}=F^{-1}(A(\hat{O}{l}), P(O{l})) o^=F−1(A(O^l),P(Ol)),其中 P 是相位信息。
三、实验结果
将SID 、DRBN 和NAFNet 作为基础网络,并将CSNorm集成到其中。使用峰值信噪比(PSNR)和结构相似性指数度量(SSIM)作为评估指标。在合成场景和真实场景中进行实验。
-
对于合成场景,模拟两种输入亮度条件,即interp:输入图像由原始低光照图像和真实图像插值得到(权重为0.5),以及scale:输入图像x按照 x ′ = Λ x η x'=\Lambda x^{\eta} x′=Λxη( η = 1.1 \eta=1.1 η=1.1 , Λ = 1.2 \Lambda=1.2 Λ=1.2)进行处理。
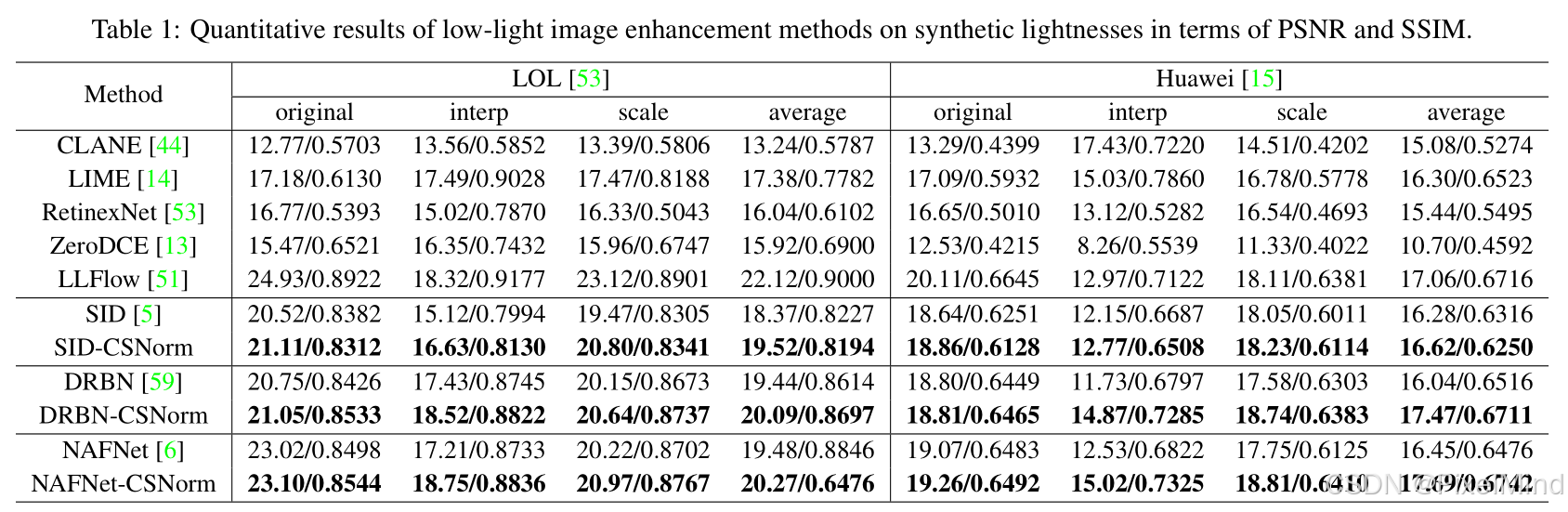
可以看出在未知亮度条件下添加了CSNorm后网络泛化能力得到增强。
-
对于真实场景,使用LOL 和huawei进行交叉验证。模型在一个数据集上训练,并在另一个数据集上测试。
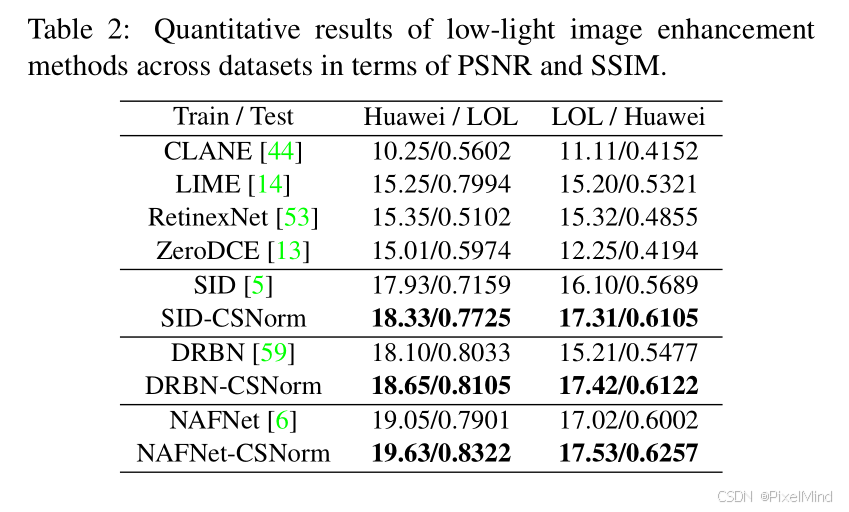 表2展示了不同数据集上的泛化性能。可以看出,以往的方法往往会对训练数据集过拟合,泛化能力较差。CSNorm提高了所有基础网络的性能,极大地增强了它们在未知亮度条件下的泛化能力。
表2展示了不同数据集上的泛化性能。可以看出,以往的方法往往会对训练数据集过拟合,泛化能力较差。CSNorm提高了所有基础网络的性能,极大地增强了它们在未知亮度条件下的泛化能力。 -
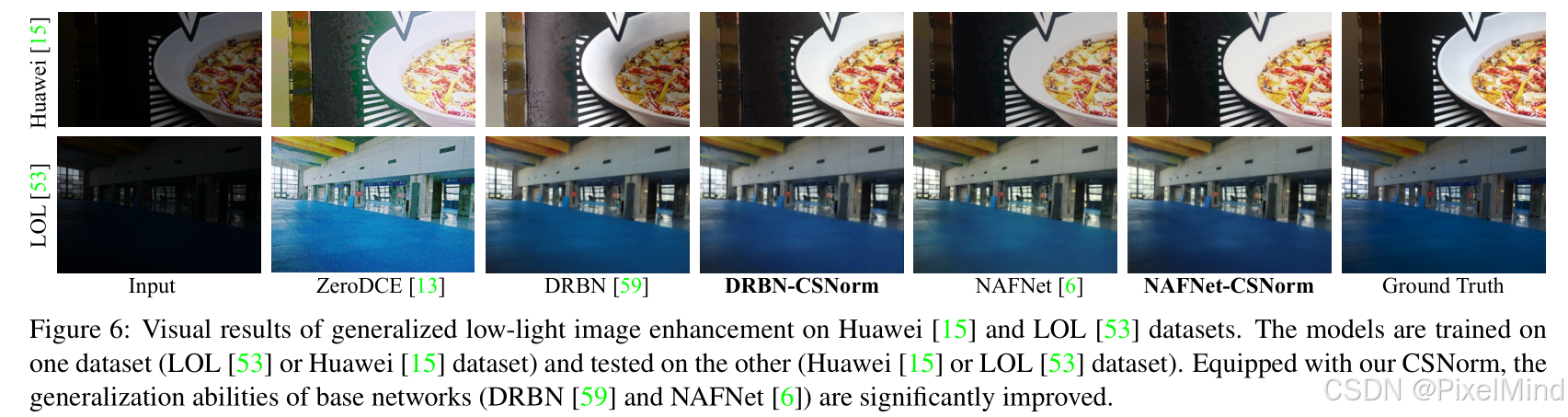
下图中展示了定性结果。尽管训练图像和测试图像之间存在较大差异(两个数据集是在不同亮度下分别采集的),但配备了CSNorm的基础网络在未知亮度条件下仍能产生视觉效果良好的结果。
四、总结
本文围绕亮度适应的泛化问题展开研究,提出了通道选择性归一化(CSNorm)方法,旨在提升现有亮度适应模型在未知亮度条件下的泛化能力,同时保持其在已知条件下的重建准确性。
感谢阅读,欢迎留言或私信,一起探讨和交流。
如果对你有帮助的话,也希望可以给博主点一个关注,感谢。