本教程将两种不同类型的机器人集成到同一个仿真中。它详细说明了如何构建程序逻辑以在子任务之间切换。通过本教程,你将获得构建更复杂的机器人交互仿真经验。
1. 创建一个场景
首先,按照以下步骤将 Jetbot 、Franka Panda 和 Cube 添加到场景中,并通过子任务来简化代码:
python
# Adding Multiple Robots
# 创建场景
from omni.isaac.examples.base_sample import BaseSample
from omni.isaac.franka.tasks import PickPlace
from omni.isaac.wheeled_robots.robots import WheeledRobot
from omni.isaac.core.utils.nucleus import get_assets_root_path
from omni.isaac.core.tasks import BaseTask
import numpy as np
# RobotsPlaying 继承自 BaseTask 类,表示一个包含多个机器人任务的复合任务。
class RobotsPlaying(BaseTask):
def __init__(
self,
name
):
super().__init__(name=name, offset=None)
self._jetbot_goal_position = np.array([130, 30, 0]) # 初始化时,定义了 Jetbot 的目标位置
# 使用 PickPlace 任务类创建了一个 拾取和放置任务,并定义了立方体的初始位置和目标位置。
self._pick_place_task = PickPlace(
cube_initial_position=np.array([0.1, 0.3, 0.05]),
target_position=np.array([0.7, -0.3, 0.0515 / 2.0])
)
return
def set_up_scene(self, scene):
super().set_up_scene(scene)
self._pick_place_task.set_up_scene(scene)
assets_root_path = get_assets_root_path()
jetbot_asset_path = assets_root_path + "/Isaac/Robots/Jetbot/jetbot.usd"
# 在场景中添加 Jetbot 机器人
# 通过 WheeledRobot 类来创建一个轮式机器人实例,并将其添加到场景中。
# 这里指定了轮子关节的名称和机器人模型
self._jetbot = scene.add(
WheeledRobot(
prim_path="/World/Fancy_Robot",
name="fancy_robot",
wheel_dof_names=["left_wheel_joint", "right_wheel_joint"],
create_robot=True,
usd_path=jetbot_asset_path,
position=np.array([0, 0.3, 0]))
)
pick_place_params = self._pick_place_task.get_params()
self._franka = scene.get_object(pick_place_params["robot_name"]["value"])
# 将 Franka Panda 的默认位置设置为 (1.0, 0, 0),即重置后的位置。
self._franka.set_world_pose(position=np.array([1.0, 0, 0]))
self._franka.set_default_state(position=np.array([1.0, 0, 0]))
return
# 该方法获取 Jetbot 的信息
def get_observations(self):
current_jetbot_position, current_jetbot_orientation = self._jetbot.get_world_pose()
# Observations needed to drive the jetbot to push the cube
observations= {
self._jetbot.name: {
"position": current_jetbot_position,
"orientation": current_jetbot_orientation,
"goal_position": self._jetbot_goal_position
}
}
return observations
def get_params(self):
# 为了避免硬编码,获取了 PickPlace 任务的参数并将其返回,同时也添加了 Jetbot 和 Franka Panda 的名称作为任务的参数。
pick_place_params = self._pick_place_task.get_params()
params_representation = pick_place_params
params_representation["jetbot_name"] = {"value": self._jetbot.name, "modifiable": False}
params_representation["franka_name"] = pick_place_params["robot_name"]
return params_representation
def post_reset(self):
self._franka.gripper.set_joint_positions(self._franka.gripper.joint_opened_positions)
class MyHelloWorld(BaseSample): # 继承自basesample
def __init__(self) -> None:
super().__init__()
return
def setup_scene(self):
world = self.get_world()
world.add_task(RobotsPlaying(name="awesome_task")) # 添加自定义的任务
return
2. 驱动Jetbot 把cube推给Franka.
python
from omni.isaac.examples.base_sample import BaseSample
from omni.isaac.franka.tasks import PickPlace
from omni.isaac.wheeled_robots.robots import WheeledRobot
from omni.isaac.core.utils.nucleus import get_assets_root_path
from omni.isaac.core.tasks import BaseTask
from omni.isaac.wheeled_robots.controllers.wheel_base_pose_controller import WheelBasePoseController
from omni.isaac.wheeled_robots.controllers.differential_controller import DifferentialController
import numpy as np
# RobotsPlaying 继承自 BaseTask 类,表示一个包含多个机器人任务的复合任务。
class RobotsPlaying(BaseTask):
def __init__(
self,
name
):
super().__init__(name=name, offset=None)
self._jetbot_goal_position = np.array([1.3, 0.3, 0]) # 初始化时,定义了 Jetbot 的目标位置
# 使用 PickPlace 任务类创建了一个 拾取和放置任务,并定义了立方体的初始位置和目标位置。
self._pick_place_task = PickPlace(
cube_initial_position=np.array([0.1, 0.3, 0.05]),
target_position=np.array([0.7, -0.3, 0.0515 / 2.0])
)
return
def set_up_scene(self, scene):
super().set_up_scene(scene)
self._pick_place_task.set_up_scene(scene)
assets_root_path = get_assets_root_path()
jetbot_asset_path = assets_root_path + "/Isaac/Robots/Jetbot/jetbot.usd"
# 在场景中添加 Jetbot 机器人
# 通过 WheeledRobot 类来创建一个轮式机器人实例,并将其添加到场景中。
# 这里指定了轮子关节的名称和机器人模型
self._jetbot = scene.add(
WheeledRobot(
prim_path="/World/Fancy_Robot",
name="fancy_robot",
wheel_dof_names=["left_wheel_joint", "right_wheel_joint"],
create_robot=True,
usd_path=jetbot_asset_path,
position=np.array([0, 0.3, 0]))
)
pick_place_params = self._pick_place_task.get_params()
self._franka = scene.get_object(pick_place_params["robot_name"]["value"])
# 将 Franka Panda 的默认位置设置为 (1.0, 0, 0),即重置后的位置。
self._franka.set_world_pose(position=np.array([1.0, 0, 0]))
self._franka.set_default_state(position=np.array([1.0, 0, 0]))
return
# 该方法获取 Jetbot 的信息
def get_observations(self):
current_jetbot_position, current_jetbot_orientation = self._jetbot.get_world_pose()
# Observations needed to drive the jetbot to push the cube
observations= {
self._jetbot.name: {
"position": current_jetbot_position,
"orientation": current_jetbot_orientation,
"goal_position": self._jetbot_goal_position
}
}
return observations
def get_params(self):
# 为了避免硬编码,获取了 PickPlace 任务的参数并将其返回,同时也添加了 Jetbot 和 Franka Panda 的名称作为任务的参数。
pick_place_params = self._pick_place_task.get_params()
params_representation = pick_place_params
params_representation["jetbot_name"] = {"value": self._jetbot.name, "modifiable": False}
params_representation["franka_name"] = pick_place_params["robot_name"]
return params_representation
def post_reset(self):
self._franka.gripper.set_joint_positions(self._franka.gripper.joint_opened_positions)
class MyHelloWorld(BaseSample): # 继承自basesample
def __init__(self) -> None:
super().__init__()
return
def setup_scene(self):
world = self.get_world()
world.add_task(RobotsPlaying(name="awesome_task")) # 添加自定义的任务
return
async def setup_post_load(self):
self._world = self.get_world()
task_params = self._world.get_task("awesome_task").get_params()
self._jetbot = self._world.scene.get_object(task_params["jetbot_name"]["value"])
self._cube_name = task_params["cube_name"]["value"]
# 这里使用了 WheelBasePoseController 来控制 Jetbot 的运动
self._jetbot_controller = WheelBasePoseController(
name="cool_controller",
open_loop_wheel_controller=DifferentialController(
name="simple_control",
wheel_radius=0.03,
wheel_base=0.1125
)
)
self._world.add_physics_callback("sim_step", callback_fn=self.physics_step)
await self._world.play_async()
return
async def setup_post_reset(self):
self._jetbot_controller.reset()
await self._world.play_async()
return
def physics_step(self, step_size):
current_observations = self._world.get_observations()
self._jetbot.apply_action(
self._jetbot_controller.forward(
start_position=current_observations[self._jetbot.name]["position"],
start_orientation=current_observations[self._jetbot.name]["orientation"],
goal_position=current_observations[self._jetbot.name]["goal_position"]
)
)
return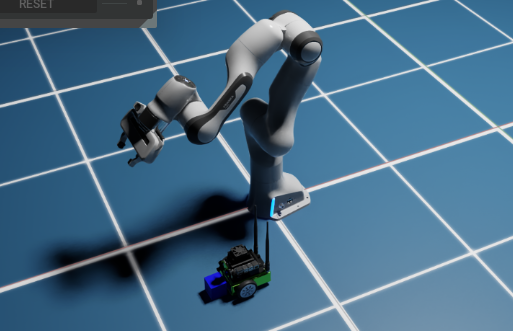
3. 增加任务逻辑
下一步,驱动 jetbot 后退让出空间给franka去把cube捡起并放到指定位置。
python
from omni.isaac.examples.base_sample import BaseSample
from omni.isaac.franka.tasks import PickPlace
from omni.isaac.wheeled_robots.robots import WheeledRobot
from omni.isaac.core.utils.nucleus import get_assets_root_path
from omni.isaac.core.tasks import BaseTask
from omni.isaac.wheeled_robots.controllers.wheel_base_pose_controller import WheelBasePoseController
from omni.isaac.wheeled_robots.controllers.differential_controller import DifferentialController
from omni.isaac.core.utils.types import ArticulationAction
import numpy as np
# RobotsPlaying 继承自 BaseTask 类,表示一个包含多个机器人任务的复合任务。
class RobotsPlaying(BaseTask):
def __init__(
self,
name
):
super().__init__(name=name, offset=None)
self._jetbot_goal_position = np.array([1.3, 0.3, 0]) # 初始化时,定义了 Jetbot 的目标位置
# 增加任务逻辑标志--任务事件
self._task_event = 0
# 使用 PickPlace 任务类创建了一个 拾取和放置任务,并定义了立方体的初始位置和目标位置。
self._pick_place_task = PickPlace(
cube_initial_position=np.array([0.1, 0.3, 0.05]),
target_position=np.array([0.7, -0.3, 0.0515 / 2.0])
)
return
def set_up_scene(self, scene):
super().set_up_scene(scene)
self._pick_place_task.set_up_scene(scene)
assets_root_path = get_assets_root_path()
jetbot_asset_path = assets_root_path + "/Isaac/Robots/Jetbot/jetbot.usd"
# 在场景中添加 Jetbot 机器人
# 通过 WheeledRobot 类来创建一个轮式机器人实例,并将其添加到场景中。
# 这里指定了轮子关节的名称和机器人模型
self._jetbot = scene.add(
WheeledRobot(
prim_path="/World/Fancy_Robot",
name="fancy_robot",
wheel_dof_names=["left_wheel_joint", "right_wheel_joint"],
create_robot=True,
usd_path=jetbot_asset_path,
position=np.array([0, 0.3, 0]))
)
pick_place_params = self._pick_place_task.get_params()
self._franka = scene.get_object(pick_place_params["robot_name"]["value"])
# 将 Franka Panda 的默认位置设置为 (1.0, 0, 0),即重置后的位置。
self._franka.set_world_pose(position=np.array([1.0, 0, 0]))
self._franka.set_default_state(position=np.array([1.0, 0, 0]))
return
# 该方法获取 Jetbot 的信息
def get_observations(self):
current_jetbot_position, current_jetbot_orientation = self._jetbot.get_world_pose()
# Observations needed to drive the jetbot to push the cube
observations= {
# 通过任务事件来控制 Jetbot 的行为
"task_event": self._task_event,
self._jetbot.name: {
"position": current_jetbot_position,
"orientation": current_jetbot_orientation,
"goal_position": self._jetbot_goal_position
}
}
return observations
def get_params(self):
# 为了避免硬编码,获取了 PickPlace 任务的参数并将其返回,同时也添加了 Jetbot 和 Franka Panda 的名称作为任务的参数。
pick_place_params = self._pick_place_task.get_params()
params_representation = pick_place_params
params_representation["jetbot_name"] = {"value": self._jetbot.name, "modifiable": False}
params_representation["franka_name"] = pick_place_params["robot_name"]
return params_representation
# 该方法在每个物理步之前调用,进行判断当前 Jetbot 应该做什么。
# 它根据任务事件的状态来决定 Jetbot 的行为。
def pre_step(self, control_index, simulation_time):
# 如果任务事件为 0,表示 Jetbot 需要移动到目标位置。
if self._task_event == 0:
current_jetbot_position, _ = self._jetbot.get_world_pose()
# 计算 Jetbot 到目标位置的距离,如果距离小于 4cm,则认为 Jetbot 到达了目标位置。
if np.mean(np.abs(current_jetbot_position[:2] - self._jetbot_goal_position[:2])) < 0.04:
self._task_event += 1
self._cube_arrive_step_index = control_index
elif self._task_event == 1:
# Jetbot 有200个物理步长的时间来后退
if control_index - self._cube_arrive_step_index == 200:
self._task_event += 1 # 任务事件加1,表示 Jetbot 后退的时间结束。
return
def post_reset(self):
self._franka.gripper.set_joint_positions(self._franka.gripper.joint_opened_positions)
class MyHelloWorld(BaseSample): # 继承自basesample
def __init__(self) -> None:
super().__init__()
return
def setup_scene(self):
world = self.get_world()
world.add_task(RobotsPlaying(name="awesome_task")) # 添加自定义的任务
return
async def setup_post_load(self):
self._world = self.get_world()
task_params = self._world.get_task("awesome_task").get_params()
self._jetbot = self._world.scene.get_object(task_params["jetbot_name"]["value"])
self._cube_name = task_params["cube_name"]["value"]
# 这里使用了 WheelBasePoseController 来控制 Jetbot 的运动
self._jetbot_controller = WheelBasePoseController(
name="cool_controller",
open_loop_wheel_controller=DifferentialController(
name="simple_control",
wheel_radius=0.03,
wheel_base=0.1125
)
)
self._world.add_physics_callback("sim_step", callback_fn=self.physics_step)
await self._world.play_async()
return
async def setup_post_reset(self):
self._jetbot_controller.reset()
await self._world.play_async()
return
def physics_step(self, step_size):
current_observations = self._world.get_observations()
# 如果任务事件为 0,表示 Jetbot 需要移动到目标位置。
if current_observations["task_event"] == 0:
self._jetbot.apply_wheel_actions(
self._jetbot_controller.forward(
start_position=current_observations[self._jetbot.name]["position"],
start_orientation=current_observations[self._jetbot.name]["orientation"],
goal_position=current_observations[self._jetbot.name]["goal_position"]))
# 如果任务事件为 1,表示 Jetbot 需要向后移动。
elif current_observations["task_event"] == 1:
# Go backwards
self._jetbot.apply_wheel_actions(ArticulationAction(joint_velocities=[-8, -8]))
# 如果任务事件为 2,表示 Jetbot 停止移动。
elif current_observations["task_event"] == 2:
# Apply zero velocity to override the velocity applied before.
# Note: target joint positions and target joint velocities will stay active unless changed
self._jetbot.apply_wheel_actions(ArticulationAction(joint_velocities=[0.0, 0.0]))
return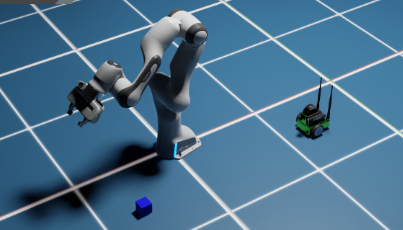
4. 机器人交接任务
现在该是franka去pickplace了
python
from omni.isaac.examples.base_sample import BaseSample
from omni.isaac.franka.tasks import PickPlace
from omni.isaac.wheeled_robots.robots import WheeledRobot
from omni.isaac.core.utils.nucleus import get_assets_root_path
from omni.isaac.core.tasks import BaseTask
from omni.isaac.wheeled_robots.controllers.wheel_base_pose_controller import WheelBasePoseController
from omni.isaac.wheeled_robots.controllers.differential_controller import DifferentialController
from omni.isaac.core.utils.types import ArticulationAction
from omni.isaac.franka.controllers import PickPlaceController
import numpy as np
# RobotsPlaying 继承自 BaseTask 类,表示一个包含多个机器人任务的复合任务。
class RobotsPlaying(BaseTask):
def __init__(
self,
name
):
super().__init__(name=name, offset=None)
self._jetbot_goal_position = np.array([1.3, 0.3, 0]) # 初始化时,定义了 Jetbot 的目标位置
# 增加任务逻辑标志--任务事件
self._task_event = 0
# 使用 PickPlace 任务类创建了一个 拾取和放置任务,并定义了立方体的初始位置和目标位置。
self._pick_place_task = PickPlace(
cube_initial_position=np.array([0.1, 0.3, 0.05]),
target_position=np.array([0.7, -0.3, 0.0515 / 2.0])
)
return
def set_up_scene(self, scene):
super().set_up_scene(scene)
self._pick_place_task.set_up_scene(scene)
assets_root_path = get_assets_root_path()
jetbot_asset_path = assets_root_path + "/Isaac/Robots/Jetbot/jetbot.usd"
# 在场景中添加 Jetbot 机器人
# 通过 WheeledRobot 类来创建一个轮式机器人实例,并将其添加到场景中。
# 这里指定了轮子关节的名称和机器人模型
self._jetbot = scene.add(
WheeledRobot(
prim_path="/World/Fancy_Robot",
name="fancy_robot",
wheel_dof_names=["left_wheel_joint", "right_wheel_joint"],
create_robot=True,
usd_path=jetbot_asset_path,
position=np.array([0, 0.3, 0]))
)
pick_place_params = self._pick_place_task.get_params()
self._franka = scene.get_object(pick_place_params["robot_name"]["value"])
# 将 Franka Panda 的默认位置设置为 (1.0, 0, 0),即重置后的位置。
self._franka.set_world_pose(position=np.array([1.0, 0, 0]))
self._franka.set_default_state(position=np.array([1.0, 0, 0]))
return
# 该方法获取 Jetbot 的信息
def get_observations(self):
current_jetbot_position, current_jetbot_orientation = self._jetbot.get_world_pose()
# Observations needed to drive the jetbot to push the cube
observations= {
# 通过任务事件来控制 Jetbot 的行为
"task_event": self._task_event,
self._jetbot.name: {
"position": current_jetbot_position,
"orientation": current_jetbot_orientation,
"goal_position": self._jetbot_goal_position
}
}
# 获取 PickPlace 任务的观察值,并将其添加到 observations 字典中。
observations.update(self._pick_place_task.get_observations())
return observations
def get_params(self):
# 为了避免硬编码,获取了 PickPlace 任务的参数并将其返回,同时也添加了 Jetbot 和 Franka Panda 的名称作为任务的参数。
pick_place_params = self._pick_place_task.get_params()
params_representation = pick_place_params
params_representation["jetbot_name"] = {"value": self._jetbot.name, "modifiable": False}
params_representation["franka_name"] = pick_place_params["robot_name"]
return params_representation
# 该方法在每个物理步之前调用,进行判断当前 Jetbot 应该做什么。
# 它根据任务事件的状态来决定 Jetbot 的行为。
def pre_step(self, control_index, simulation_time):
# 如果任务事件为 0,表示 Jetbot 需要移动到目标位置。
if self._task_event == 0:
current_jetbot_position, _ = self._jetbot.get_world_pose()
# 计算 Jetbot 到目标位置的距离,如果距离小于 4cm,则认为 Jetbot 到达了目标位置。
if np.mean(np.abs(current_jetbot_position[:2] - self._jetbot_goal_position[:2])) < 0.04:
self._task_event += 1
self._cube_arrive_step_index = control_index
elif self._task_event == 1:
# Jetbot 有200个物理步长的时间来后退
if control_index - self._cube_arrive_step_index == 200:
self._task_event += 1 # 任务事件加1,表示 Jetbot 后退的时间结束。
return
def post_reset(self):
self._franka.gripper.set_joint_positions(self._franka.gripper.joint_opened_positions)
class MyHelloWorld(BaseSample): # 继承自basesample
def __init__(self) -> None:
super().__init__()
return
def setup_scene(self):
world = self.get_world()
world.add_task(RobotsPlaying(name="awesome_task")) # 添加自定义的任务
return
async def setup_post_load(self):
self._world = self.get_world()
# 获得任务参数
task_params = self._world.get_task("awesome_task").get_params()
# 获得jetbot和cube的名称和参数
self._jetbot = self._world.scene.get_object(task_params["jetbot_name"]["value"])
self._cube_name = task_params["cube_name"]["value"]
# 获得franka机械臂的名称和参数
self._franka = self._world.scene.get_object(task_params["franka_name"]["value"])
# 这里使用了 WheelBasePoseController 来控制 Jetbot 的运动
self._jetbot_controller = WheelBasePoseController(
name="cool_controller",
open_loop_wheel_controller=DifferentialController(
name="simple_control",
wheel_radius=0.03,
wheel_base=0.1125
)
)
# 增加了 PickPlaceController 来控制 Franka Panda 机械臂的抓取和放置任务。
self._franka_controller = PickPlaceController(
name="pick_place_controller",
gripper=self._franka.gripper,
robot_articulation=self._franka
)
self._world.add_physics_callback("sim_step", callback_fn=self.physics_step)
await self._world.play_async()
return
async def setup_post_reset(self):
self._jetbot_controller.reset()
# 重置 Franka Panda 的控制器
self._franka_controller.reset()
await self._world.play_async()
return
def physics_step(self, step_size):
current_observations = self._world.get_observations()
# 如果任务事件为 0,表示 Jetbot 需要移动到目标位置。
if current_observations["task_event"] == 0:
self._jetbot.apply_wheel_actions(
self._jetbot_controller.forward(
start_position=current_observations[self._jetbot.name]["position"],
start_orientation=current_observations[self._jetbot.name]["orientation"],
goal_position=current_observations[self._jetbot.name]["goal_position"]))
# 如果任务事件为 1,表示 Jetbot 需要向后移动。
elif current_observations["task_event"] == 1:
# Go backwards
self._jetbot.apply_wheel_actions(ArticulationAction(joint_velocities=[-8, -8]))
# 如果任务事件为 2,表示 Jetbot 停止移动。
elif current_observations["task_event"] == 2:
# Apply zero velocity to override the velocity applied before.
# Note: target joint positions and target joint velocities will stay active unless changed
self._jetbot.apply_wheel_actions(ArticulationAction(joint_velocities=[0.0, 0.0]))
# jetbot后退完后,让 Franka Panda 机械臂执行抓取和放置任务
actions = self._franka_controller.forward(
picking_position=current_observations[self._cube_name]["position"],
placing_position=current_observations[self._cube_name]["target_position"],
current_joint_positions=current_observations[self._franka.name]["joint_positions"])
self._franka.apply_action(actions)
# Pause once the controller is done
if self._franka_controller.is_done():
self._world.pause()
return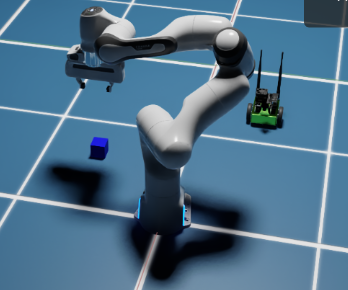
5. 任务参数化
本教程描述了如何在 Omniverse Isaac Sim 中添加多个任务。它解释了如何向任务中添加参数以扩展你的仿真。
python
# 多个任务
from omni.isaac.examples.base_sample import BaseSample
from omni.isaac.franka.tasks import PickPlace
from omni.isaac.wheeled_robots.robots import WheeledRobot
from omni.isaac.core.utils.nucleus import get_assets_root_path
from omni.isaac.core.tasks import BaseTask
from omni.isaac.wheeled_robots.controllers.wheel_base_pose_controller import WheelBasePoseController
from omni.isaac.wheeled_robots.controllers.differential_controller import DifferentialController
from omni.isaac.core.utils.types import ArticulationAction
from omni.isaac.franka.controllers import PickPlaceController
# find_unique_string_name 用于生成一个唯一的字符串名称,通常用于 Prim 路径 或 场景名称,以确保这些名称不会重复。
from omni.isaac.core.utils.string import find_unique_string_name
# 验证一个 Prim 路径是否有效,即路径是否已存在于当前仿真场景中。
from omni.isaac.core.utils.prims import is_prim_path_valid
from omni.isaac.core.objects.cuboid import VisualCuboid
import numpy as np
# RobotsPlaying 继承自 BaseTask 类,表示一个包含多个机器人任务的复合任务。
class RobotsPlaying(BaseTask):
# 位置被偏移量 (offset) 调整。
def __init__(self,name,offset=None):
super().__init__(name=name, offset=offset)
self._jetbot_goal_position = np.array([1.3, 0.3, 0]) + self._offset # 初始化时,定义了 Jetbot 的目标位置
# 增加任务逻辑标志--任务事件
self._task_event = 0
# 使用 PickPlace 任务类创建了一个 拾取和放置任务,并定义了立方体的初始位置和目标位置。
self._pick_place_task = PickPlace(
cube_initial_position=np.array([0.1, 0.3, 0.05]),
target_position=np.array([0.7, -0.3, 0.0515 / 2.0]),
offset=offset
)
return
def set_up_scene(self, scene):
super().set_up_scene(scene)
self._pick_place_task.set_up_scene(scene)
# 为Jetbot创建一个唯一的名称和Prim路径
jetbot_name = find_unique_string_name(
initial_name="fancy_jetbot", is_unique_fn=lambda x: not self.scene.object_exists(x)
)
jetbot_prim_path = find_unique_string_name(
initial_name="/World/Fancy_Jetbot", is_unique_fn=lambda x: not is_prim_path_valid(x)
)
assets_root_path = get_assets_root_path()
jetbot_asset_path = assets_root_path + "/Isaac/Robots/Jetbot/jetbot.usd"
# 在场景中添加 Jetbot 机器人
# 通过 WheeledRobot 类来创建一个轮式机器人实例,并将其添加到场景中。
# 这里指定了轮子关节的名称和机器人模型
self._jetbot = scene.add(
WheeledRobot(
prim_path=jetbot_prim_path,
name=jetbot_name,
wheel_dof_names=["left_wheel_joint", "right_wheel_joint"],
create_robot=True,
usd_path=jetbot_asset_path,
position=np.array([0, 0.3, 0]))
)
# 将Jetbot添加到任务对象中
self._task_objects[self._jetbot.name] = self._jetbot
# 获取PickPlace任务中的Franka机器人
pick_place_params = self._pick_place_task.get_params()
self._franka = scene.get_object(pick_place_params["robot_name"]["value"])
# 将 Franka Panda 的默认位置设置为 (1.0, 0, 0),即重置后的位置。
current_position, _ = self._franka.get_world_pose()
self._franka.set_world_pose(position=current_position + np.array([1.0, 0, 0]))
self._franka.set_default_state(position=current_position + np.array([1.0, 0, 0]))
# 调用父类方法,将任务对象按照偏移量进行平移
self._move_task_objects_to_their_frame()
return
# 该方法获取 Jetbot 的信息
def get_observations(self):
current_jetbot_position, current_jetbot_orientation = self._jetbot.get_world_pose()
# Observations needed to drive the jetbot to push the cube
observations= {
# 通过任务事件来控制 Jetbot 的行为
"task_event": self._task_event,
self._jetbot.name: {
"position": current_jetbot_position,
"orientation": current_jetbot_orientation,
"goal_position": self._jetbot_goal_position
}
}
# 获取 PickPlace 任务的观察值,并将其添加到 observations 字典中。
observations.update(self._pick_place_task.get_observations())
return observations
def get_params(self):
# 为了避免硬编码,获取了 PickPlace 任务的参数并将其返回,同时也添加了 Jetbot 和 Franka Panda 的名称作为任务的参数。
pick_place_params = self._pick_place_task.get_params()
params_representation = pick_place_params
params_representation["jetbot_name"] = {"value": self._jetbot.name, "modifiable": False}
params_representation["franka_name"] = pick_place_params["robot_name"]
return params_representation
# 该方法在每个物理步之前调用,进行判断当前 Jetbot 应该做什么。
# 它根据任务事件的状态来决定 Jetbot 的行为。
def pre_step(self, control_index, simulation_time):
# 如果任务事件为 0,表示 Jetbot 需要移动到目标位置。
if self._task_event == 0:
current_jetbot_position, _ = self._jetbot.get_world_pose()
# 计算 Jetbot 到目标位置的距离,如果距离小于 4cm,则认为 Jetbot 到达了目标位置。
if np.mean(np.abs(current_jetbot_position[:2] - self._jetbot_goal_position[:2])) < 0.04:
self._task_event += 1
self._cube_arrive_step_index = control_index
elif self._task_event == 1:
# Jetbot 有200个物理步长的时间来后退
if control_index - self._cube_arrive_step_index == 100:
self._task_event += 1 # 任务事件加1,表示 Jetbot 后退的时间结束。
return
def post_reset(self):
self._franka.gripper.set_joint_positions(self._franka.gripper.joint_opened_positions)
class MyHelloWorld(BaseSample): # 继承自basesample
def __init__(self) -> None:
super().__init__()
return
def setup_scene(self):
world = self.get_world()
world.add_task(RobotsPlaying(name="awesome_task", offset=np.array([0, -1.0, 0]))) # 添加自定义的任务
# 仅用于可视化,展示Franka原本应该在的位置
VisualCuboid(prim_path="/new_cube_1",
name="visual_cube",
position=np.array([1.0, 0, 0.05]),
scale=np.array([0.1, 0.1, 0.1]))
return
async def setup_post_load(self):
self._world = self.get_world()
# 获得任务参数
task_params = self._world.get_task("awesome_task").get_params()
# 获得jetbot和cube的名称和参数
self._jetbot = self._world.scene.get_object(task_params["jetbot_name"]["value"])
self._cube_name = task_params["cube_name"]["value"]
# 获得franka机械臂的名称和参数
self._franka = self._world.scene.get_object(task_params["franka_name"]["value"])
# 这里使用了 WheelBasePoseController 来控制 Jetbot 的运动
self._jetbot_controller = WheelBasePoseController(
name="cool_controller",
open_loop_wheel_controller=DifferentialController(
name="simple_control",
wheel_radius=0.03,
wheel_base=0.1125
)
)
# 增加了 PickPlaceController 来控制 Franka Panda 机械臂的抓取和放置任务。
self._franka_controller = PickPlaceController(
name="pick_place_controller",
gripper=self._franka.gripper,
robot_articulation=self._franka
)
self._world.add_physics_callback("sim_step", callback_fn=self.physics_step)
await self._world.play_async()
return
async def setup_post_reset(self):
robots_playing_task = self._world.get_task("awesome_task")
robots_playing_task._task_event = 0 # 直接重置任务实例的事件
self._jetbot_controller.reset()
# 重置 Franka Panda 的控制器
self._franka_controller.reset()
await self._world.play_async()
return
def physics_step(self, step_size):
current_observations = self._world.get_observations()
# 如果任务事件为 0,表示 Jetbot 需要移动到目标位置。
if current_observations["task_event"] == 0:
self._jetbot.apply_wheel_actions(
self._jetbot_controller.forward(
start_position=current_observations[self._jetbot.name]["position"],
start_orientation=current_observations[self._jetbot.name]["orientation"],
goal_position=current_observations[self._jetbot.name]["goal_position"]))
# 如果任务事件为 1,表示 Jetbot 需要向后移动。
elif current_observations["task_event"] == 1:
# Go backwards
self._jetbot.apply_wheel_actions(ArticulationAction(joint_velocities=[-2, -2]))
# 如果任务事件为 2,表示 Jetbot 停止移动。
elif current_observations["task_event"] == 2:
# Apply zero velocity to override the velocity applied before.
# Note: target joint positions and target joint velocities will stay active unless changed
self._jetbot.apply_wheel_actions(ArticulationAction(joint_velocities=[0.0, 0.0]))
# jetbot后退完后,让 Franka Panda 机械臂执行抓取和放置任务
actions = self._franka_controller.forward(
picking_position=current_observations[self._cube_name]["position"],
placing_position=current_observations[self._cube_name]["target_position"],
current_joint_positions=current_observations[self._franka.name]["joint_positions"])
self._franka.apply_action(actions)
# Pause once the controller is done
if self._franka_controller.is_done():
self._world.pause()
return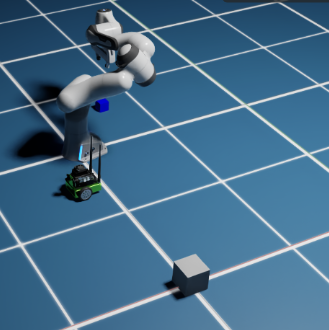
6. 扩展到多个任务
python
# 多个任务
from omni.isaac.examples.base_sample import BaseSample
from omni.isaac.franka.tasks import PickPlace
from omni.isaac.wheeled_robots.robots import WheeledRobot
from omni.isaac.core.utils.nucleus import get_assets_root_path
from omni.isaac.core.tasks import BaseTask
from omni.isaac.wheeled_robots.controllers.wheel_base_pose_controller import WheelBasePoseController
from omni.isaac.wheeled_robots.controllers.differential_controller import DifferentialController
from omni.isaac.core.utils.types import ArticulationAction
from omni.isaac.franka.controllers import PickPlaceController
# find_unique_string_name 用于生成一个唯一的字符串名称,通常用于 Prim 路径 或 场景名称,以确保这些名称不会重复。
from omni.isaac.core.utils.string import find_unique_string_name
# 验证一个 Prim 路径是否有效,即路径是否已存在于当前仿真场景中。
from omni.isaac.core.utils.prims import is_prim_path_valid
from omni.isaac.core.objects.cuboid import VisualCuboid
import numpy as np
# RobotsPlaying 继承自 BaseTask 类,表示一个包含多个机器人任务的复合任务。
class RobotsPlaying(BaseTask):
# 位置被偏移量 (offset) 调整。
def __init__(self,name,offset=None):
super().__init__(name=name, offset=offset)
# 随机化jetbot目标位置
self._jetbot_goal_position = np.array([np.random.uniform(1.2, 1.6), 0.3, 0]) + self._offset # 初始化时,定义了 Jetbot 的目标位置
# 增加任务逻辑标志--任务事件
self._task_event = 0
# 使用 PickPlace 任务类创建了一个 拾取和放置任务,并定义了立方体的初始位置和目标位置。
self._pick_place_task = PickPlace(
cube_initial_position=np.array([0.1, 0.3, 0.05]),
target_position=np.array([0.7, -0.3, 0.0515 / 2.0]),
offset=offset
)
return
def set_up_scene(self, scene):
super().set_up_scene(scene)
self._pick_place_task.set_up_scene(scene)
# 为Jetbot创建一个唯一的名称和Prim路径
jetbot_name = find_unique_string_name(
initial_name="fancy_jetbot", is_unique_fn=lambda x: not self.scene.object_exists(x)
)
jetbot_prim_path = find_unique_string_name(
initial_name="/World/Fancy_Jetbot", is_unique_fn=lambda x: not is_prim_path_valid(x)
)
assets_root_path = get_assets_root_path()
jetbot_asset_path = assets_root_path + "/Isaac/Robots/Jetbot/jetbot.usd"
# 在场景中添加 Jetbot 机器人
# 通过 WheeledRobot 类来创建一个轮式机器人实例,并将其添加到场景中。
# 这里指定了轮子关节的名称和机器人模型
self._jetbot = scene.add(
WheeledRobot(
prim_path=jetbot_prim_path,
name=jetbot_name,
wheel_dof_names=["left_wheel_joint", "right_wheel_joint"],
create_robot=True,
usd_path=jetbot_asset_path,
position=np.array([0, 0.3, 0]))
)
# 将Jetbot添加到任务对象中
self._task_objects[self._jetbot.name] = self._jetbot
# 获取PickPlace任务中的Franka机器人
pick_place_params = self._pick_place_task.get_params()
self._franka = scene.get_object(pick_place_params["robot_name"]["value"])
# 将 Franka Panda 的默认位置设置为 (1.0, 0, 0),即重置后的位置。
current_position, _ = self._franka.get_world_pose()
self._franka.set_world_pose(position=current_position + np.array([1.0, 0, 0]))
self._franka.set_default_state(position=current_position + np.array([1.0, 0, 0]))
# 调用父类方法,将任务对象按照偏移量进行平移
self._move_task_objects_to_their_frame()
return
# 该方法获取 Jetbot 的信息
def get_observations(self):
current_jetbot_position, current_jetbot_orientation = self._jetbot.get_world_pose()
# Observations needed to drive the jetbot to push the cube
observations= {
# 通过任务事件来控制 Jetbot 的行为
self.name + "_event": self._task_event, # 改变任务事件以使其唯一
self._jetbot.name: {
"position": current_jetbot_position,
"orientation": current_jetbot_orientation,
"goal_position": self._jetbot_goal_position
}
}
# 获取 PickPlace 任务的观察值,并将其添加到 observations 字典中。
observations.update(self._pick_place_task.get_observations())
return observations
def get_params(self):
# 为了避免硬编码,获取了 PickPlace 任务的参数并将其返回,同时也添加了 Jetbot 和 Franka Panda 的名称作为任务的参数。
pick_place_params = self._pick_place_task.get_params()
params_representation = pick_place_params
params_representation["jetbot_name"] = {"value": self._jetbot.name, "modifiable": False}
params_representation["franka_name"] = pick_place_params["robot_name"]
return params_representation
# 该方法在每个物理步之前调用,进行判断当前 Jetbot 应该做什么。
# 它根据任务事件的状态来决定 Jetbot 的行为。
def pre_step(self, control_index, simulation_time):
# 如果任务事件为 0,表示 Jetbot 需要移动到目标位置。
if self._task_event == 0:
current_jetbot_position, _ = self._jetbot.get_world_pose()
# 计算 Jetbot 到目标位置的距离,如果距离小于 4cm,则认为 Jetbot 到达了目标位置。
if np.mean(np.abs(current_jetbot_position[:2] - self._jetbot_goal_position[:2])) < 0.04:
self._task_event += 1
self._cube_arrive_step_index = control_index
elif self._task_event == 1:
# Jetbot 有200个物理步长的时间来后退
if control_index - self._cube_arrive_step_index == 100:
self._task_event += 1 # 任务事件加1,表示 Jetbot 后退的时间结束。
return
def post_reset(self):
self._franka.gripper.set_joint_positions(self._franka.gripper.joint_opened_positions)
class MyHelloWorld(BaseSample): # 继承自basesample
def __init__(self) -> None:
super().__init__()
# Add lists for tasks,
self._tasks = []
self._num_of_tasks = 3
# Add lists for controllers
self._franka_controllers = []
self._jetbot_controllers = []
# Add lists for variables needed for control
self._jetbots = []
self._frankas = []
self._cube_names = []
return
def setup_scene(self):
world = self.get_world()
# 添加多个 RobotsPlaying 任务,每个任务都有一个偏移量
# 这里使用了循环来创建多个任务实例,并将它们添加到世界中。
for i in range(self._num_of_tasks):
world.add_task(RobotsPlaying(
name="my_awesome_task_" + str(i),
offset=np.array([0, (i * 2) - 3, 0])
))
return
async def setup_post_load(self):
self._world = self.get_world()
for i in range(self._num_of_tasks):
self._tasks.append(self._world.get_task(name="my_awesome_task_" + str(i)))
# 获取每个任务的变量
task_params = self._tasks[i].get_params()
self._frankas.append(self._world.scene.get_object(task_params["franka_name"]["value"]))
self._jetbots.append(self._world.scene.get_object(task_params["jetbot_name"]["value"]))
self._cube_names.append(task_params["cube_name"]["value"])
# 每个任务都要定义控制器
# 通过改变 dt,可以控制机器人在执行拾取和放置任务时的过渡速度,使其变得更慢,
# 这对于在一个场景中处理多个物体(如多个立方体)时可能会非常有用,确保机器人能更精确地完成每个任务。
self._franka_controllers.append(
PickPlaceController(
name="pick_place_controller",
gripper=self._frankas[i].gripper,
robot_articulation=self._frankas[i],
events_dt=[0.008, 0.002, 0.5, 0.1, 0.05, 0.05, 0.0025, 1, 0.008, 0.08]
)
)
self._jetbot_controllers.append(
WheelBasePoseController(
name="cool_controller",
open_loop_wheel_controller=
DifferentialController(
name="simple_control",
wheel_radius=0.03,
wheel_base=0.1125
)
)
)
self._world.add_physics_callback("sim_step", callback_fn=self.physics_step)
await self._world.play_async()
return
async def setup_post_reset(self):
for i in range(len(self._tasks)):
# Reset all controllers
self._franka_controllers[i].reset()
self._jetbot_controllers[i].reset()
await self._world.play_async()
return
def physics_step(self, step_size):
current_observations = self._world.get_observations()
for i in range(len(self._tasks)):
# Apply actions for each task
if current_observations[self._tasks[i].name + "_event"] == 0:
self._jetbots[i].apply_wheel_actions(
self._jetbot_controllers[i].forward(
start_position=current_observations[self._jetbots[i].name]["position"],
start_orientation=current_observations[self._jetbots[i].name]["orientation"],
goal_position=current_observations[self._jetbots[i].name]["goal_position"]))
elif current_observations[self._tasks[i].name + "_event"] == 1:
self._jetbots[i].apply_wheel_actions(ArticulationAction(joint_velocities=[-8.0, -8.0]))
elif current_observations[self._tasks[i].name + "_event"] == 2:
self._jetbots[i].apply_wheel_actions(ArticulationAction(joint_velocities=[0.0, 0.0]))
actions = self._franka_controllers[i].forward(
picking_position=current_observations[self._cube_names[i]]["position"],
placing_position=current_observations[self._cube_names[i]]["target_position"],
current_joint_positions=current_observations[self._frankas[i].name]["joint_positions"])
self._frankas[i].apply_action(actions)
return
# This function is called after a hot reload or a clear
# to delete the variables defined in this extension application
def world_cleanup(self):
self._tasks = []
self._franka_controllers = []
self._jetbot_controllers = []
self._jetbots = []
self._frankas = []
self._cube_names = []
return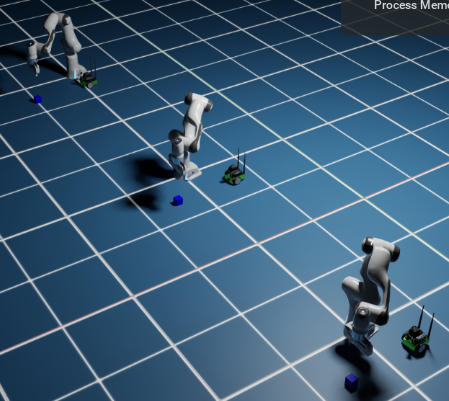
可以看出cube最终位置都不一样。