微关注"电击小子程高兴的MATLAB小屋"获取专属优惠
1.模型版本
本仿真模型基于MATLAB/Simulink(版本MATLAB 2016Ra)软件。建议采用matlab2016Ra及以上版本打开。
2.模型介绍:
1)运用欧拉方程对地面坐标到机体坐标的转换矩阵进行了推导;
2)在无人机动力学模型基础上,采用经典PID控制算法对其内环姿态和外环位置进行控制;
3)说明文档:
①详细推导四旋翼飞行器的数学模型
②PID控制器的设计、位置回路控制器设计、姿态回路控制器设计
③PID参数调整
3.仿真模型如下:
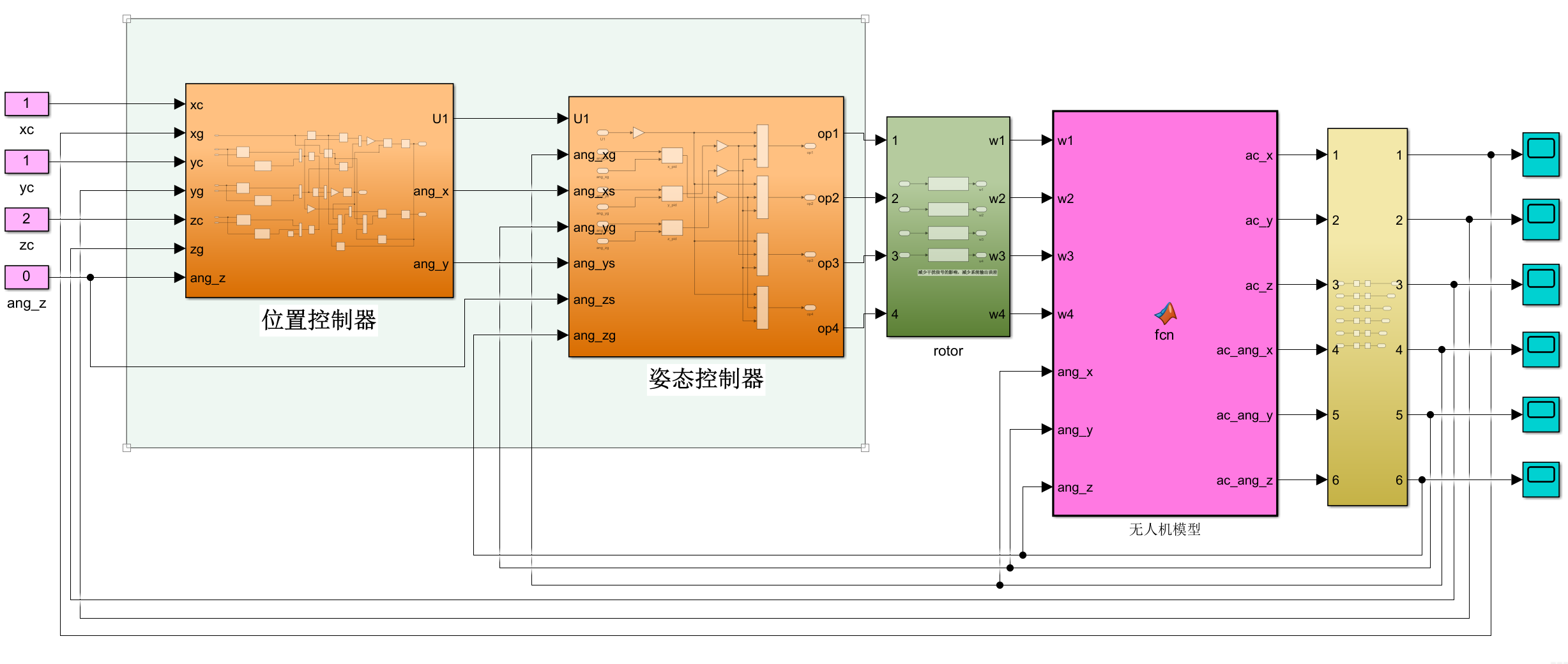
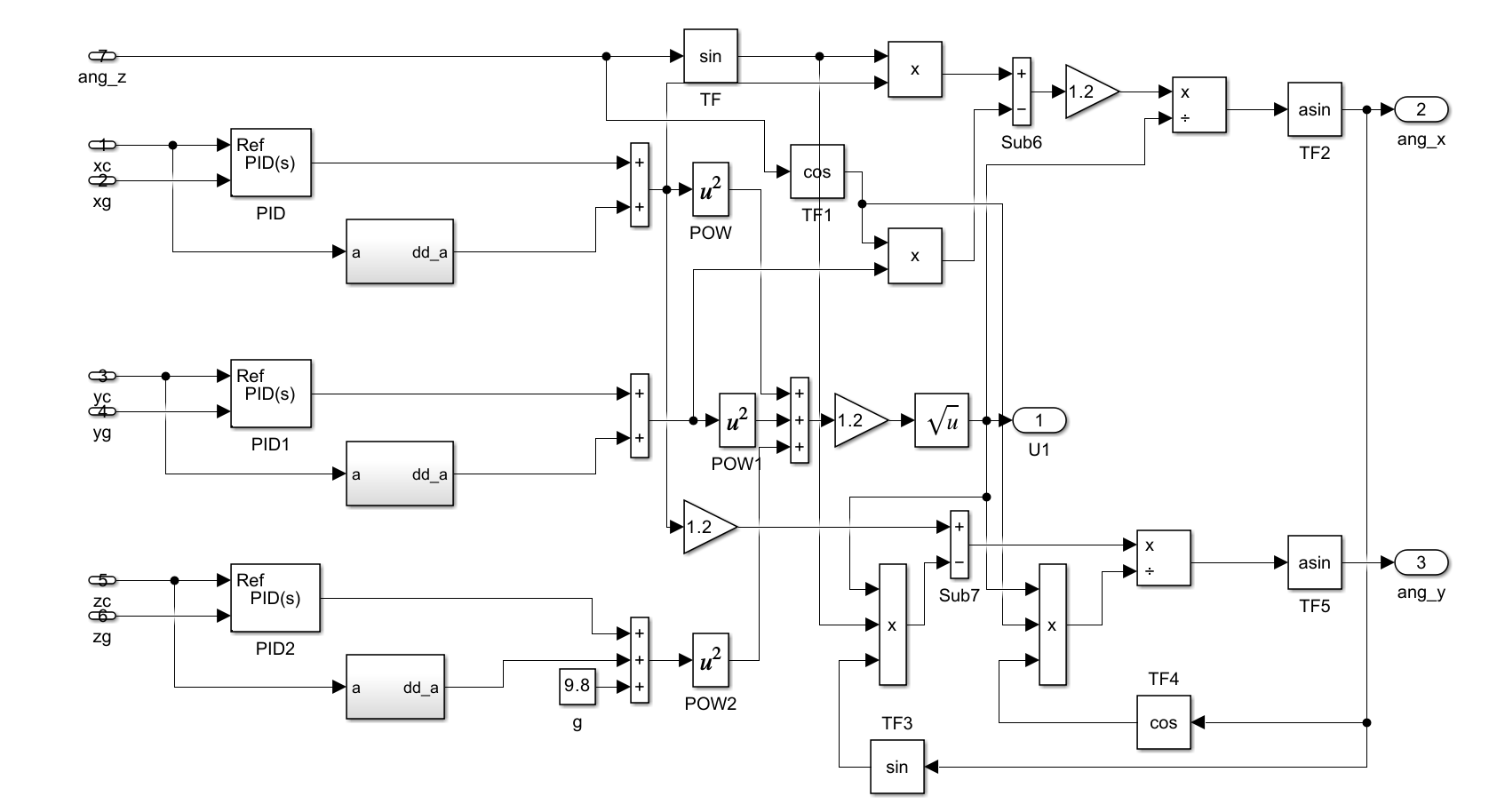
位置控制器:
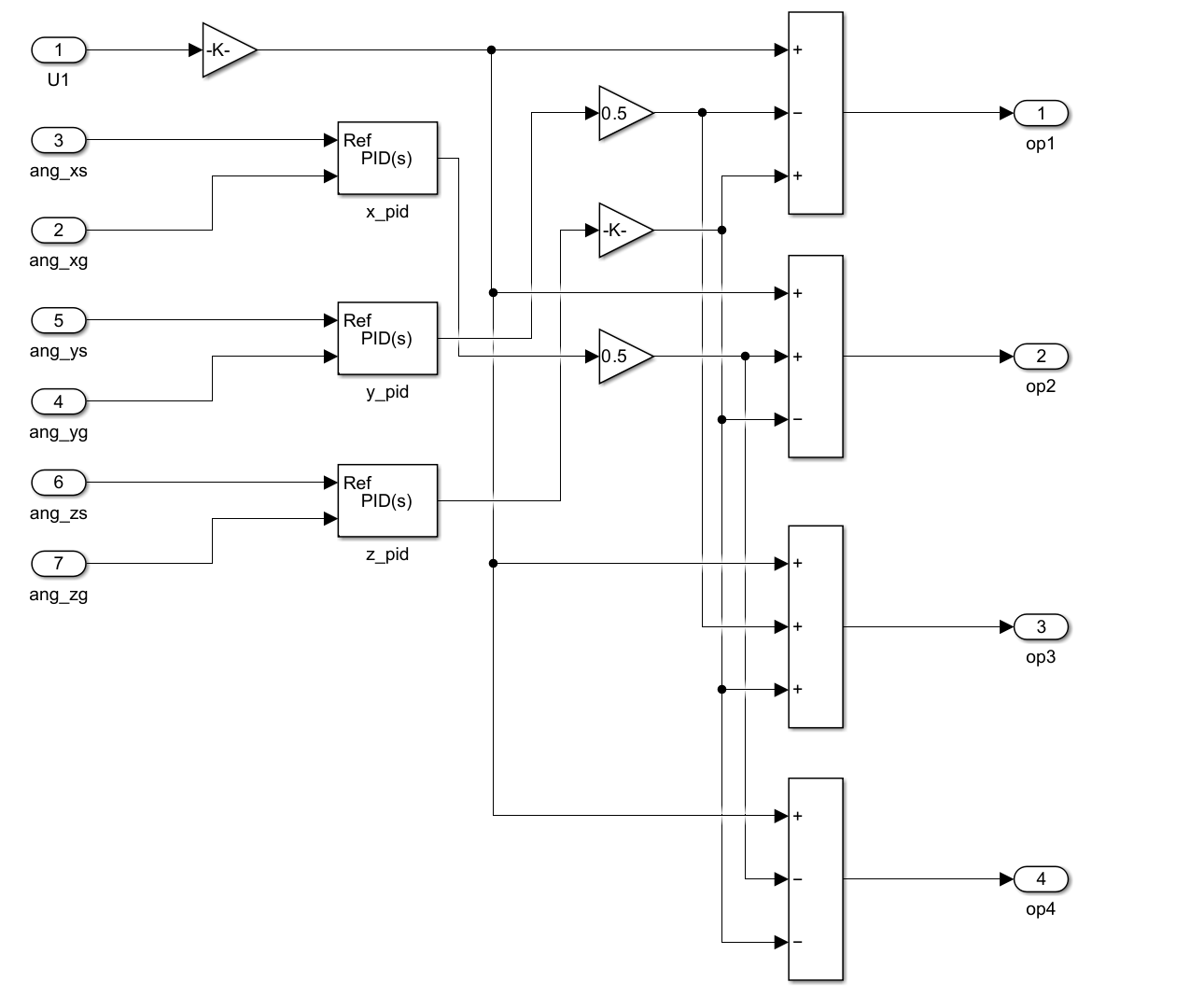
姿态控制器:
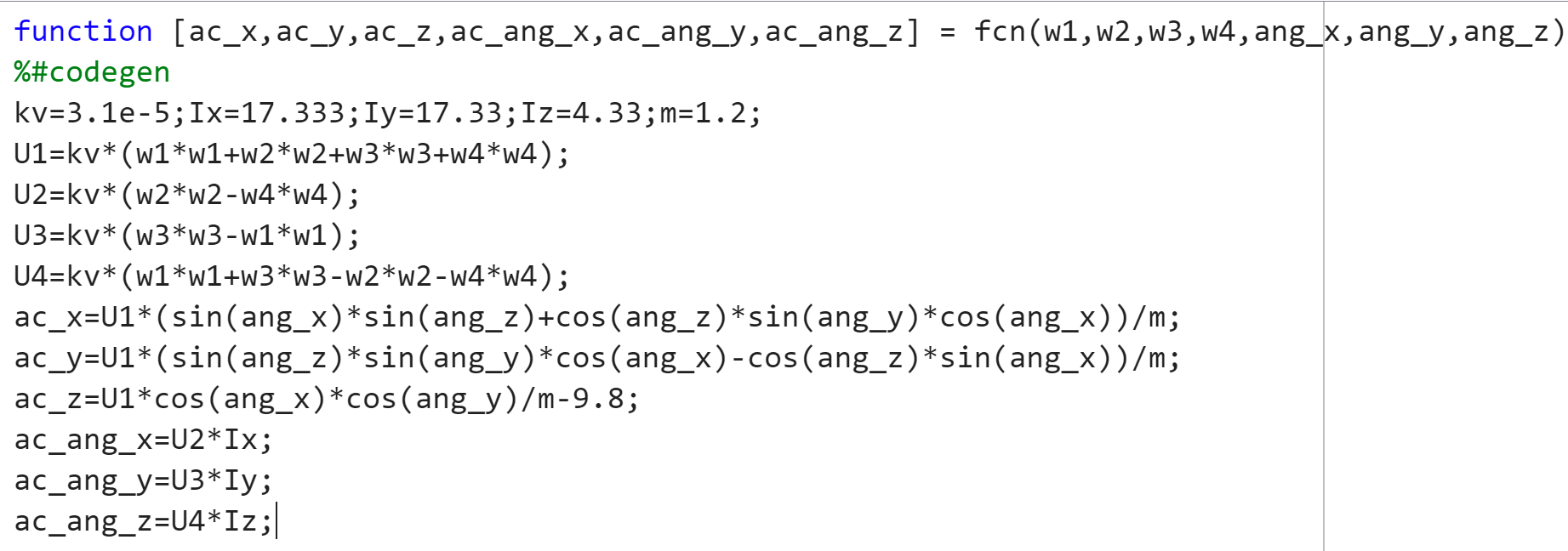
无人机模型:
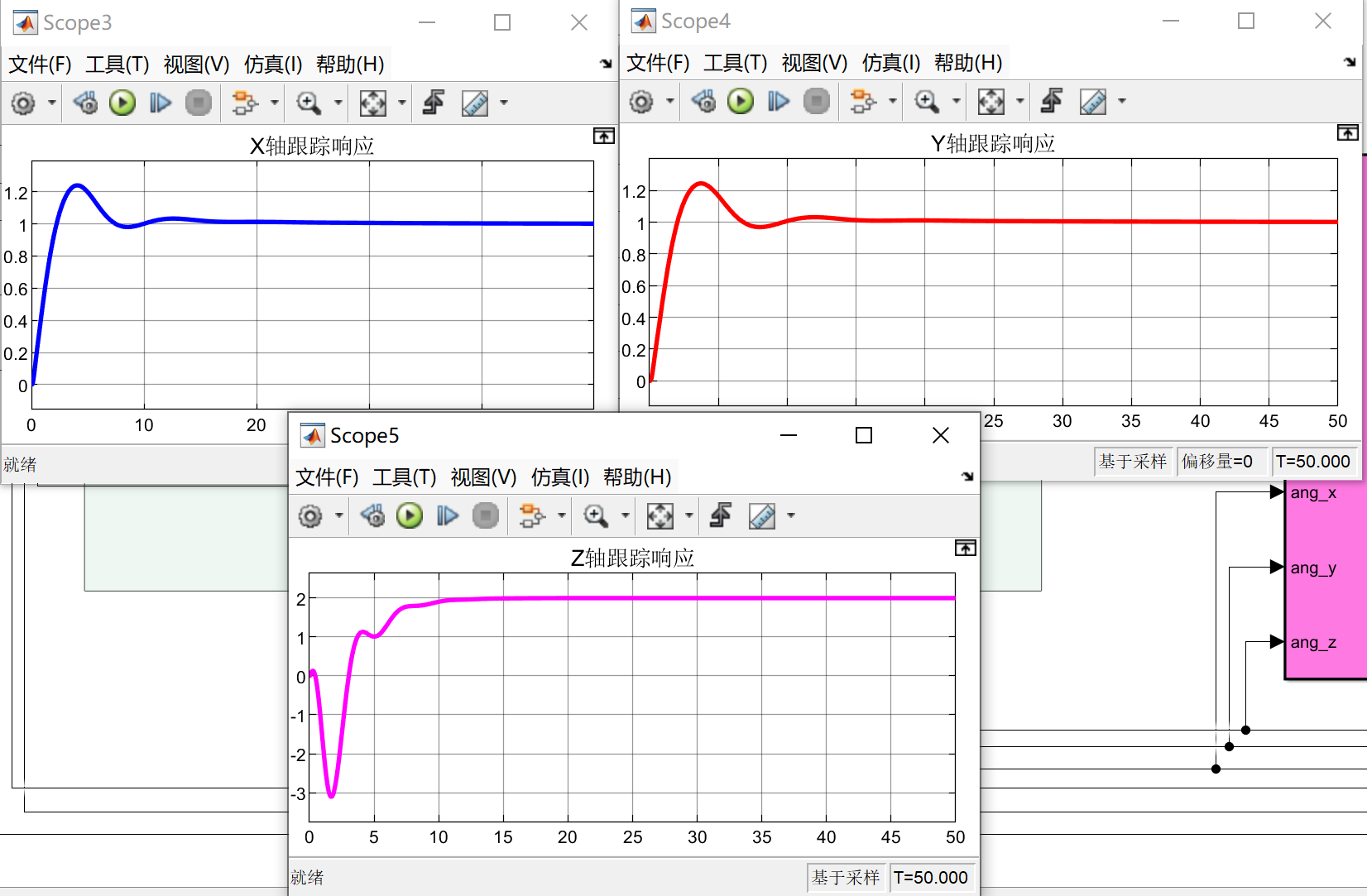
4.仿真结果如下:
5.说明文档