目录
1.摘要
为解决农业无人机在复杂丘陵地形中轨迹规划的局限性,本文提出了一种结合丘陵地形特征和农业调度需求的轨迹规划模型。为了实现高效且稳定的飞行操作,提出了一种基于干涉图像增强模型的灰狼优化算法(IIE-GWO),该算法通过提高种群多样性,平衡探索与开发能力,从而优化飞行路径。
2.灰狼优化算法GWO原理
3.无人机轨迹规划模型
无人机轨迹规划模型采用常见模型,可以查看过往文章。
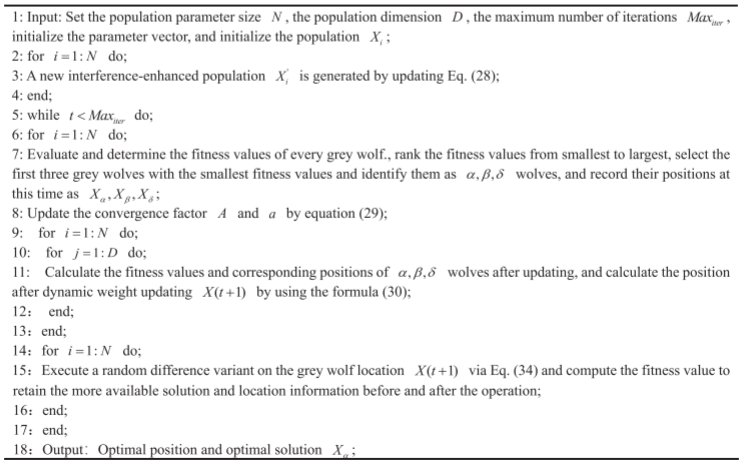
4.基于干扰模型的灰狼优化算法IIE-GWO
种群多样性增强机制
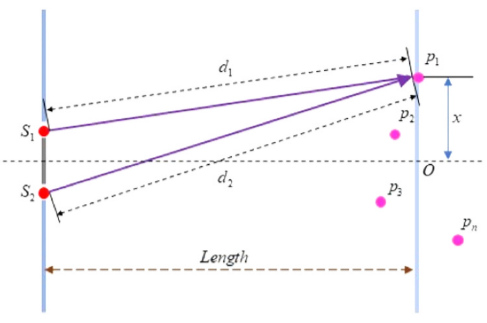
在丘陵地形的农业无人机轨迹规划中,若算法仅生成相似的轨迹路径,可能导致无人机在某些地形或障碍区域无法飞行,或飞行效率低下。基于干涉图像增强点(IIEP)的种群多样性增强机制的核心思想是,依据波干涉现象生成新的种群信息,用于初始种群,并通过计算新种群中个体的适应度值选择更优解,参与后续的优化过程。定义波的干涉增强点为 p p p,表示当前迭代中适应度最高的解向量。定义个体之间的相对距离为 D D D:
D i = ∑ i = 1 n ∥ x i − x b e s t ∥ D_i=\sum_{i=1}^n\|x_i-x_{best}\| Di=i=1∑n∥xi−xbest∥
定义更新权重 W W W:
W i = 1 1 + D i W_i=\frac{1}{1+D_i} Wi=1+Di1
W = W i ∑ i = 1 n W i W=\frac{W_i}{\sum_{i=1}^nW_i} W=∑i=1nWiWi
个体更新:
x i ( t + 1 ) = x i ( t ) + ω 1 × ( p i × x i ( t ) ) + ω 2 × ( w i × δ − x i ( t ) ) x_i(t+1)=x_i(t)+\omega_1\times(p_i\times x_i(t))+\omega_2\times(w_i\times\delta-x_i(t)) xi(t+1)=xi(t)+ω1×(pi×xi(t))+ω2×(wi×δ−xi(t))
动态权重机制
通过灵活调整不同类别灰狼的优化权重更好地平衡算法在搜索过程中的多样性和收敛性,本文引入了一种结合高斯变异和三角函数的权重参数扰动,加权更新公式:
X ( t + 1 ) = η 1 X 1 + η 2 X 2 + η 3 X 3 X(t+1)=\eta_1X_1+\eta_2X_2+\eta_3X_3 X(t+1)=η1X1+η2X2+η3X3
η 1 = ( η 1 m i n + ( η 1 m a x − η 1 m i n ) c o s ( 2 π ( t / M a x i t e r ) ) ) + σ × G a u s s i a n ( 0 , 1 ) \eta_1=(\eta_{1\mathrm{~min}}+(\eta_{1\mathrm{~max}}-\eta_{1\mathrm{~min}})\mathrm{cos}(2\pi(t/Max_{iter})))+\sigma\times Gaussian(0,1) η1=(η1 min+(η1 max−η1 min)cos(2π(t/Maxiter)))+σ×Gaussian(0,1)
η 3 = ( η 3 min + ( η 3 max − η 3 min ) c o s ( 2 π ( t / M a x i t e r ) ) ) − σ × G a u s s i a n ( 0 , 1 ) \eta_3=(\eta_{3\min}+(\eta_{3\max}-\eta_{3\min})\mathrm{cos}(2\pi(t/Max_{iter})))-\sigma\times Gaussian(0,1) η3=(η3min+(η3max−η3min)cos(2π(t/Maxiter)))−σ×Gaussian(0,1)
IIE-GWO还包括非线性控制因子(这里仿真有问题,去掉)和随机差分机制,常见策略。(略)
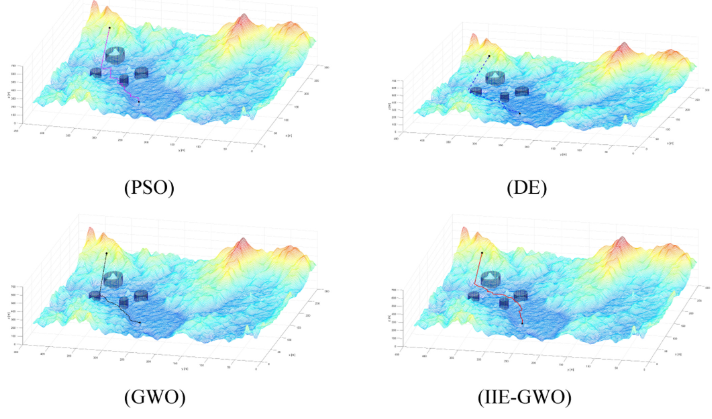
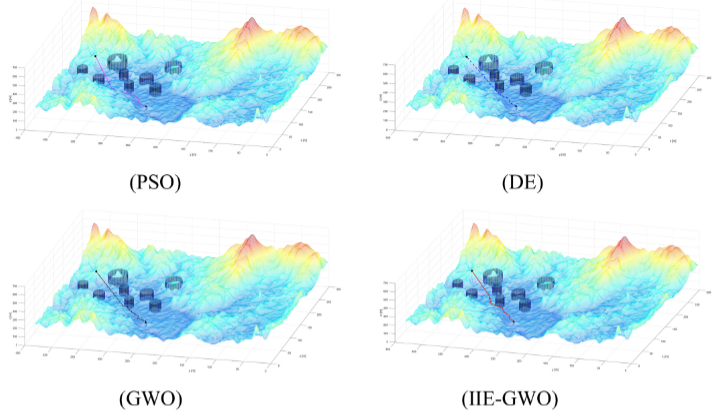
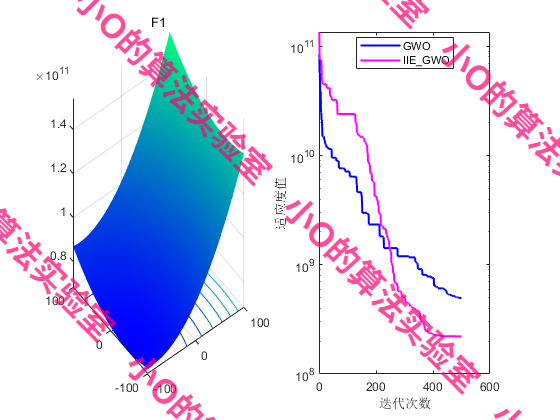
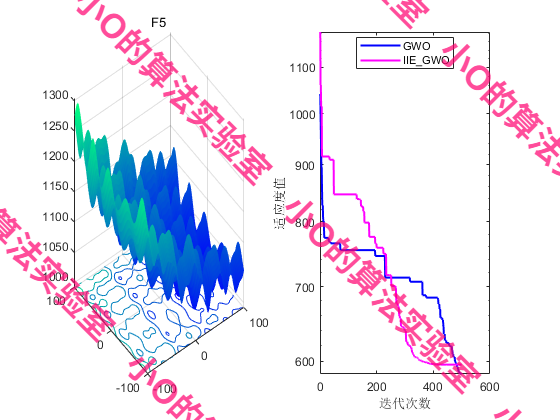
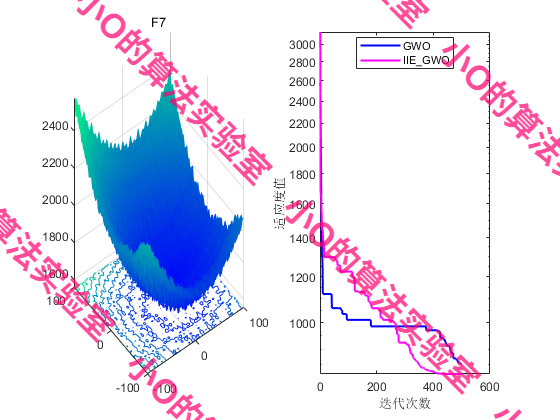
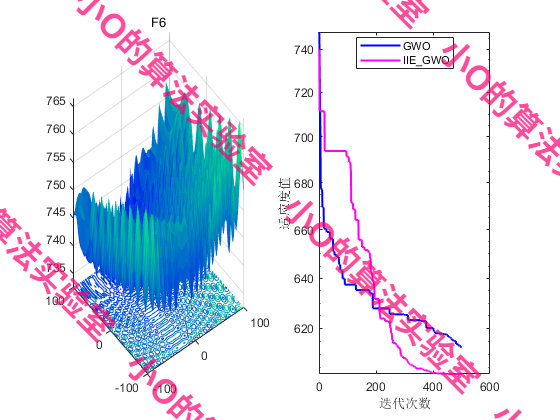
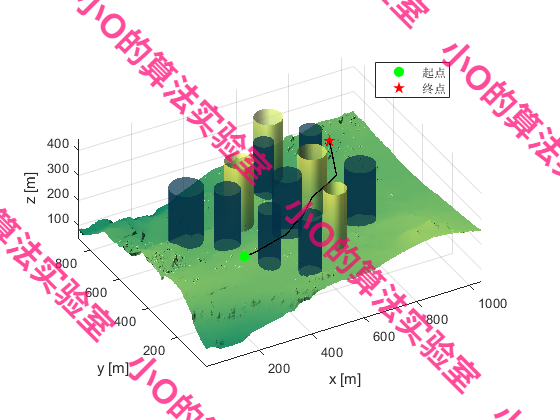
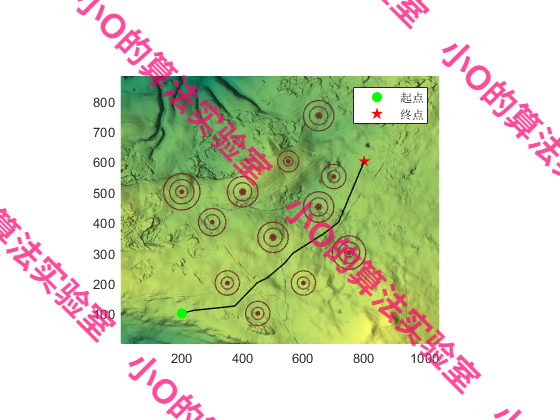
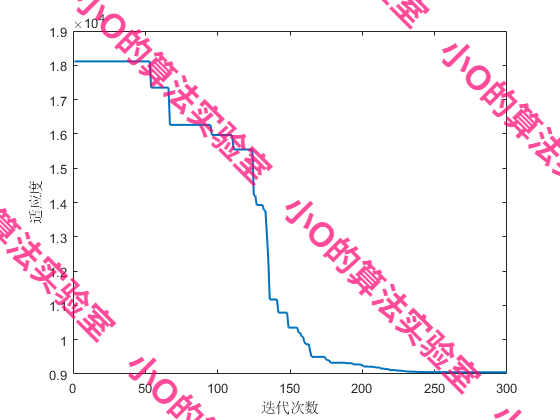
5.结果展示
6.参考文献
1 Liu X, Shao P, Li G, et al. Complex hilly terrain agricultural UAV trajectory planning driven by Grey Wolf Optimizer with interference modelJ. Applied Soft Computing, 2024, 160: 111710.
7.代码获取
xx