-
神经网络 池化操作
下采样:减少特征数量
先看池化操作:
其中ceil_mode设置成True和False池化区别:
在这个例子当中:ceil_mode=True表示边缘不满3x3的部分也会被池化,False表示边缘不满3x3的部分不会采样
code:
pythonimport torch from torch import nn from torch.nn import MaxPool2d input = torch.tensor([[1,2,0,3,1], [0,1,2,3,1], [1,2,1,0,0], [5,2,3,1,1], [2,1,0,1,1] ],dtype = torch.float32) #这里dtype为float是因为maxpool2d只能处理float类型的数据 input = torch.reshape(input,(-1,1,5,5)) print(input.shape) class Net(nn.Module): def __init__(self): super(Net,self).__init__() #ceil_mode=True表示边缘不满3x3的部分也会被池化 #kernel_size=3 默认是卷积核的大小 self.maxpool1 = MaxPool2d(kernel_size=3,ceil_mode=True) self.maxpool2 = MaxPool2d(kernel_size=3,ceil_mode=False) def forward(self,input): #output = self.maxpool1(input) output = self.maxpool2(input) return output net = Net() output = net(input) print(output)ceil_mode=True:
ceil_mode=False:

-
神经网络 池化层
这里需要先看这篇博客:
是讲卷积层的
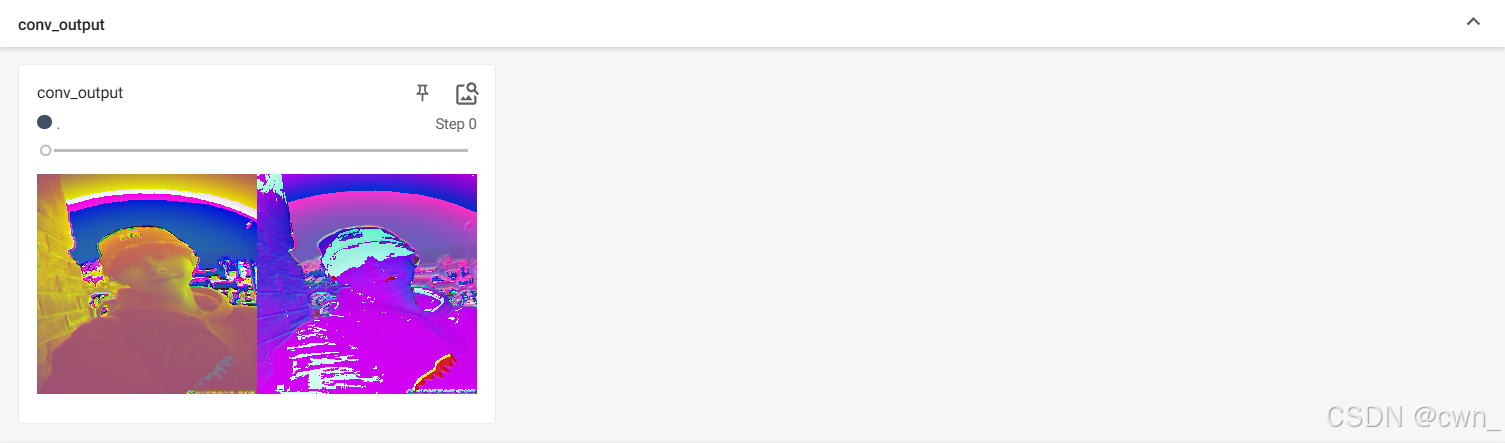
现在将上一步的卷积得到的特征图作为池化的输入
python
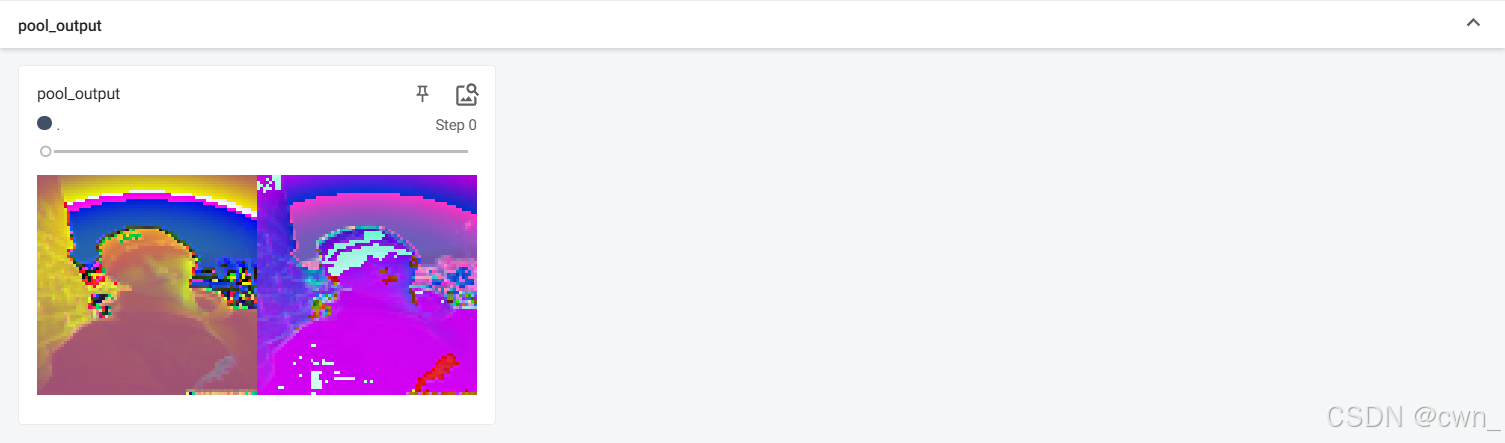
pool_output = poolnet(conv_output)
writer.add_images('pool_output',pool_output,cnt)只需要添加一下池化的操作
python
class poolNet(nn.Module):
def __init__(self):
super(poolNet,self).__init__()
#ceil_mode=True表示边缘不满3x3的部分也会被池化
#kernel_size=3 默认是卷积核的大小
self.maxpool1 = MaxPool2d(kernel_size=3,ceil_mode=True)
self.maxpool2 = MaxPool2d(kernel_size=3,ceil_mode=False)
def forward(self,input):
output = self.maxpool1(input)
#output = self.maxpool2(input)
return output
poolnet = poolNet()完整版代码:
python
import torch
import torchvision
from torch import nn
from torch.nn import Conv2d, MaxPool2d
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
from torchvision.datasets import ImageFolder
from torchvision import transforms
#数据预处理
transform = transforms.Compose([
transforms.Resize((224,224)),
transforms.ToTensor(),
transforms.Normalize(
mean = [0.5,0.5,0.5],
std = [0.5,0.5,0.5]
)
])
#加载数据集
folder_path = '../images'
dataset = ImageFolder(folder_path,transform=transform)
dataloader = DataLoader(dataset,batch_size=1)
#卷积
class convNet(nn.Module):
def __init__(self):
#调用父类nn.Module的构造函数
super(convNet,self).__init__()
self.conv1 = Conv2d(in_channels=3,out_channels=6,kernel_size=3,stride=1,padding=0)
def forward(self,x):
x = self.conv1(x)
return x
convnet = convNet()
#池化
class poolNet(nn.Module):
def __init__(self):
super(poolNet,self).__init__()
#ceil_mode=True表示边缘不满3x3的部分也会被池化
#kernel_size=3 默认是卷积核的大小
self.maxpool1 = MaxPool2d(kernel_size=3,ceil_mode=True)
self.maxpool2 = MaxPool2d(kernel_size=3,ceil_mode=False)
def forward(self,input):
output = self.maxpool1(input)
#output = self.maxpool2(input)
return output
poolnet = poolNet()
writer = SummaryWriter('../logs')
cnt = 0
for data in dataloader:
img,label = data
print(img.shape)
conv_output = convnet(img)
print(conv_output.shape)
writer.add_images('input',img,cnt)
conv_output = torch.reshape(conv_output,(-1,3,222,222))
writer.add_images('conv_output',conv_output,cnt)
pool_output = poolnet(conv_output)
writer.add_images('pool_output',pool_output,cnt)
cnt = cnt + 1
writer.close()卷积:
池化: