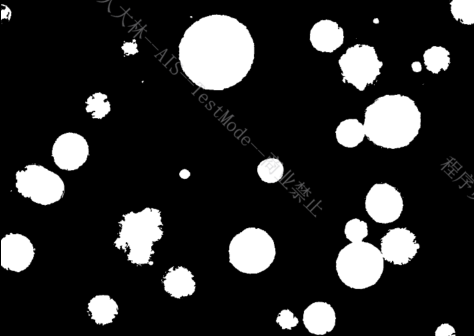
先上效果图
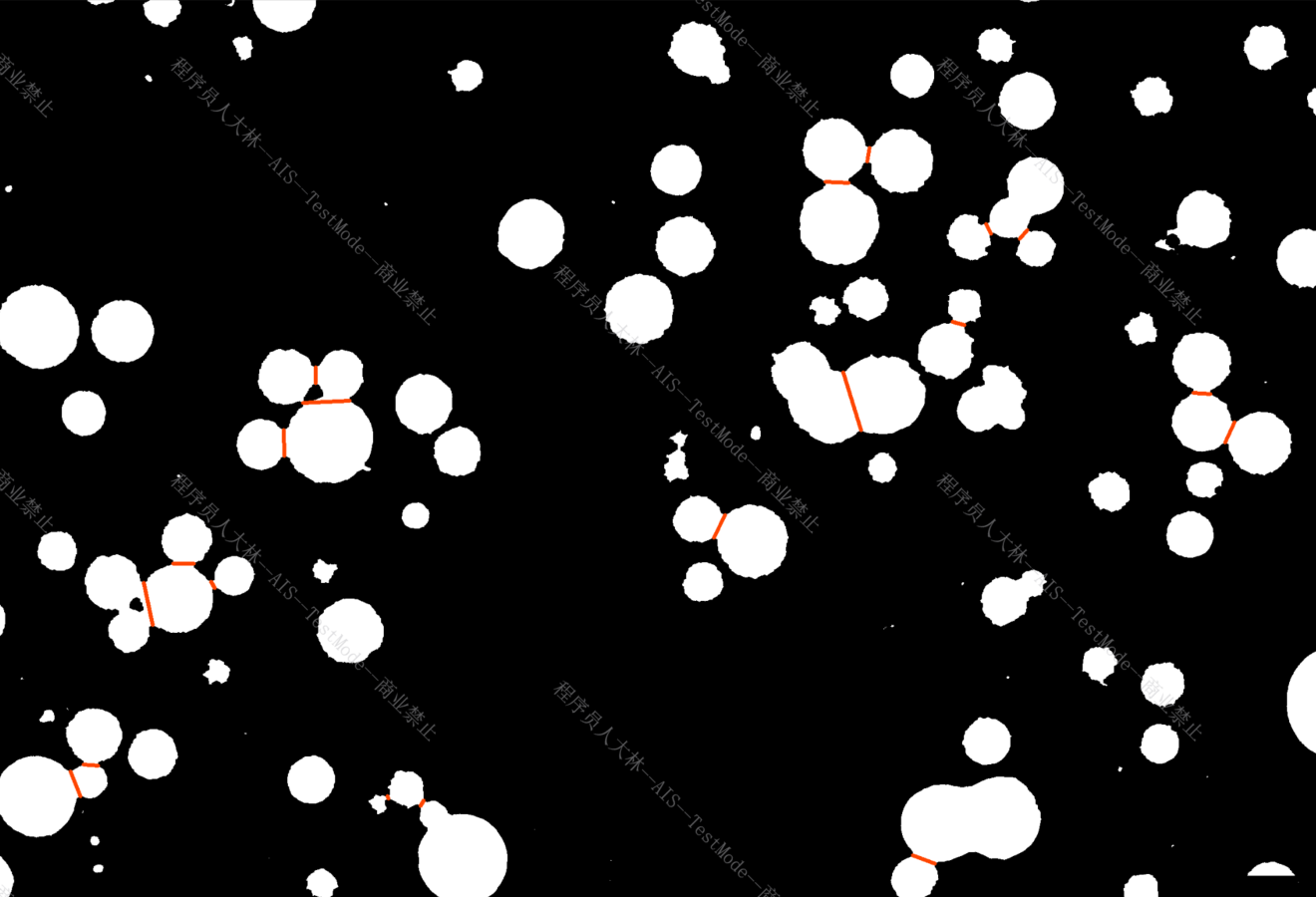
一种基于凹陷检测重叠轮廓分割的方法
这两个星期压力大的一批,心脏都给干得乱跳了,现在高血压+心率不齐+贫血。兄弟们保重身体啊。
简单说下逻辑:
- 前处理:的噼里啪啦我就不说了,根据样品来(灰度,滤波,二值化,形态学...)
- 提取轮廓并计算凸包
- 填充凸包后的轮廓 减去 原始轮廓得到凹陷区域
- 计算凹陷区域的面积,利用最大的两个凹陷区域计算出两个凹陷区域的最近两点
- 两点一条线作为分割线
步骤说起来很简单,做起来准备上天。
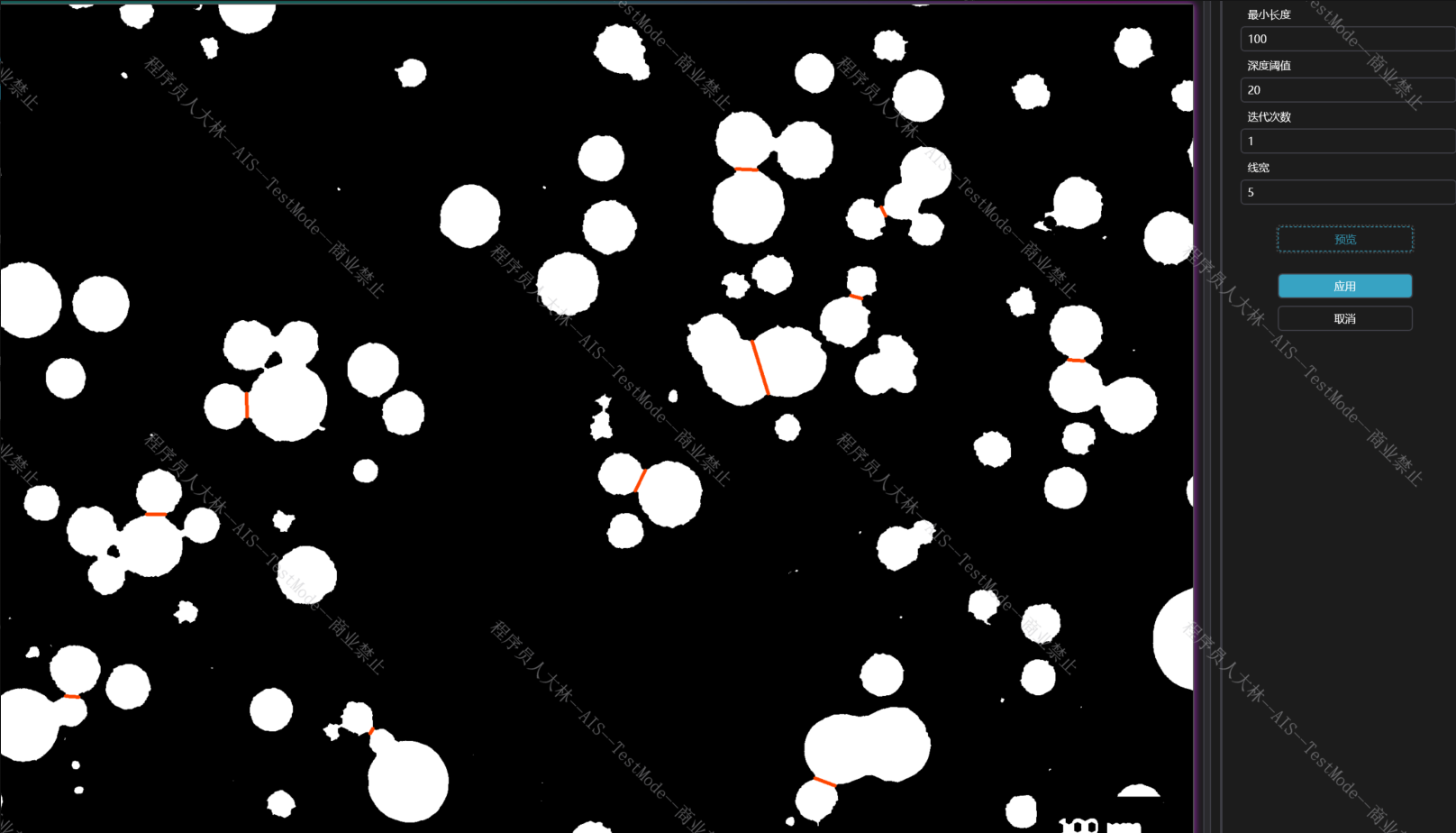
要想做到好的效果就需要有过滤参数,我做了基本的四个参数
- 最小轮廓长度:用来过滤小颗粒
- 深度阈值:凸包凹陷的阈值 用来过滤凹陷浅的轮廓
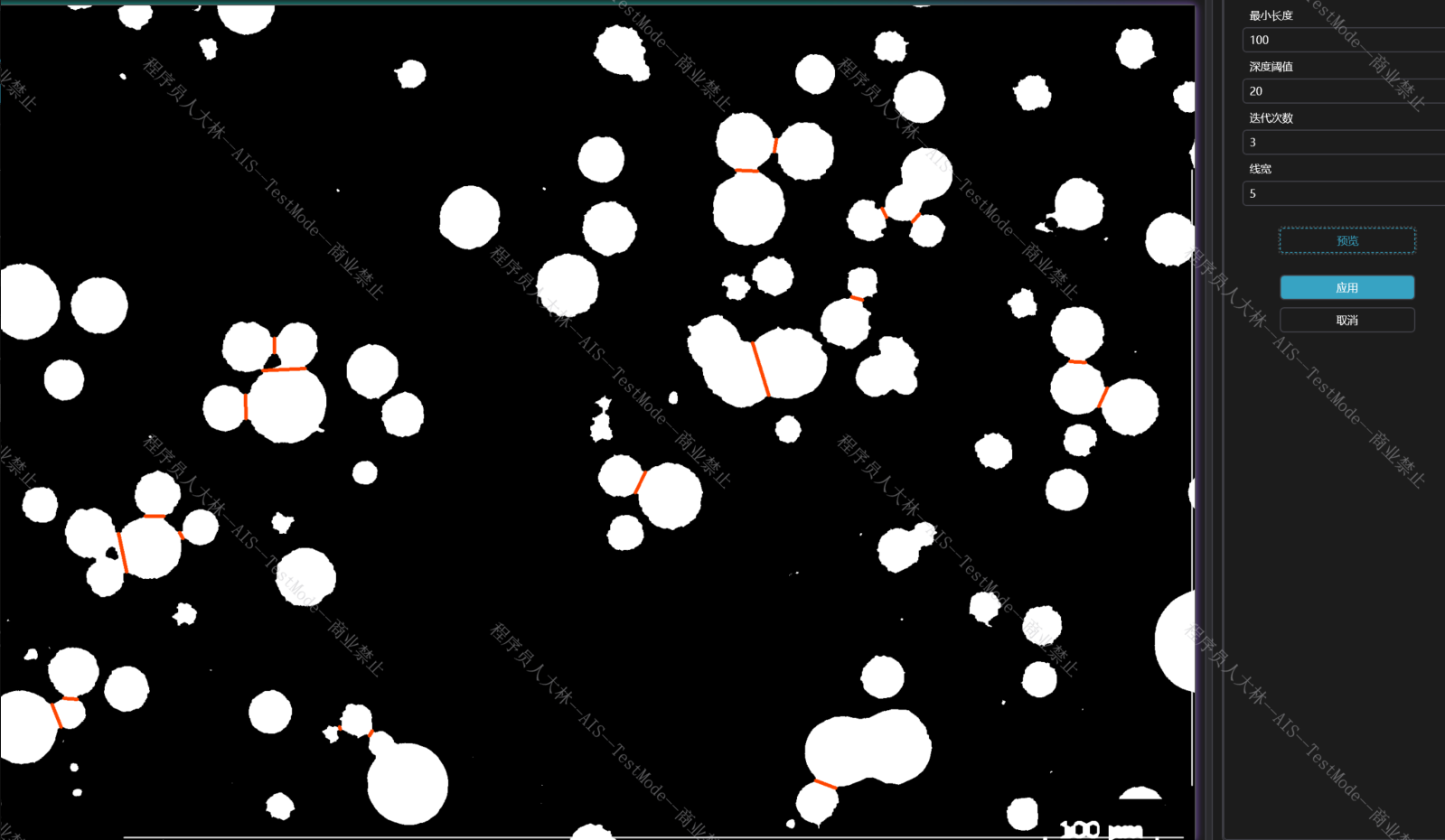
- 迭代次数:我们上面只是拿了单个轮廓两个最大凹陷区域进行分割,只适合两个规则形状的重叠,那三个呢 四个呢 无数个呢(管他那么多就是干)
- 线宽:分割线的宽度 最好要为2,别问 问就是坑
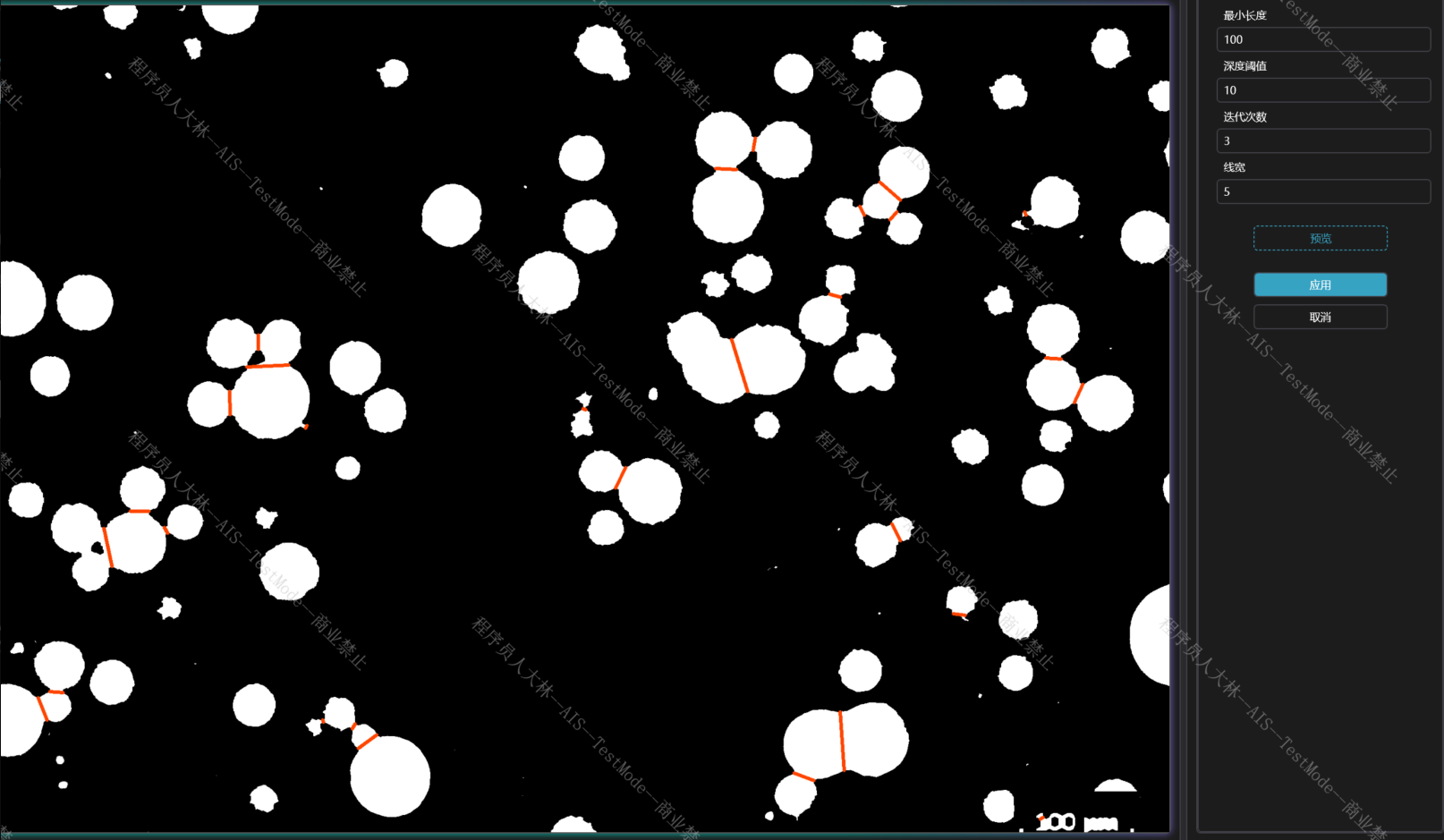
下面看看不同参数的效果:
迭代次数:可以简单理解我要分为几个颗粒
深度阈值:越小 小凹陷就越多

效果就这样了,这是基于形状的,但是都说基于距离变换+分水岭的好。先贴上代码吧白嫖兄弟们
!!!这是我封装的方法不一定适合你 参数自己传进来就行。最好别用,不一定好用。打开思路很重要..........
比如:根据长轴作为分界线 对应点是不是就可以不用那么多迭代???更好的?骨架作为分界线???迭代次数应该写在轮廓遍历里面???当然是的,但是我脑子不想思考了才来写个文章。
cs
public ProcessingResult ProcessImage(Mat src, Dictionary<string, object> parameters, Mat? originalMat = null)
{
if (!src.IsValidMat()) return new ProcessingResult();
try
{
int depthThreshold = parameters.GetValueOrDefault("depthThreshold", 100)?.ToString()?.ToInt(100) ?? 100;
int lineThickness = parameters.GetValueOrDefault("lineThickness", 2)?.ToString()?.ToInt(2) ?? 2;
int miniArcLength = parameters.GetValueOrDefault("miniArcLength", 20)?.ToString()?.ToInt(20) ?? 20;
int iterations = parameters.GetValueOrDefault("iterations", 1)?.ToString()?.ToInt(1) ?? 1;
Mat binary = new Mat();
if (src.Channels() > 1)
{
var gray = src.CvtColor(ColorConversionCodes.BGR2GRAY);
double otsuThresh = Cv2.Threshold(src, binary, 0, 255, ThresholdTypes.Binary | ThresholdTypes.Otsu);
}
else
{
binary = src;
}
Mat resultImage = binary.CvtColor(ColorConversionCodes.GRAY2BGR); // 彩色图方便显示
for (int iteration = 0; iteration < iterations; iteration++)
{
var contours = Cv2.FindContoursAsArray(binary, RetrievalModes.External, ContourApproximationModes.ApproxSimple);
foreach (var contour in contours)
{
try
{
if (contour.Length < 5) continue;
double arcLen = Cv2.ArcLength(contour, true);
if (arcLen < miniArcLength) continue;
int[] hullIndices = Cv2.ConvexHullIndices(contour, true);
if (hullIndices.Length < 3) continue;
var defects = Cv2.ConvexityDefects(contour, hullIndices);
if (defects == null || defects.Length == 0) continue;
if (!defects.Any(a => a.Item3 / 256f > depthThreshold)) continue;
Point[] hull = new Point[hullIndices.Length];
for (int i = 0; i < hullIndices.Length; i++)
{
hull[i] = contour[hullIndices[i]];
}
var rect = Cv2.BoundingRect(contour);
using Mat mask = new Mat(rect.Height, rect.Width, MatType.CV_8UC1, Scalar.Black);
Point[] TranslateContour(Point[] pts, Point offset)
{
return pts.Select(p => new Point(p.X - offset.X, p.Y - offset.Y)).ToArray();
}
var hullLocal = TranslateContour(hull, rect.TopLeft);
var contourLocal = TranslateContour(contour, rect.TopLeft);
Cv2.DrawContours(mask, new List<Point[]>() { hullLocal }, 0, Scalar.White, -1);
Cv2.DrawContours(mask, new List<Point[]>() { contourLocal }, 0, Scalar.Black, -1);
var maskContours = Cv2.FindContoursAsArray(mask, RetrievalModes.External, ContourApproximationModes.ApproxSimple);
if (maskContours.Length < 2) continue;
var maxAreaContours = GetTop2MaxAreaContours(maskContours).Take(2).ToArray();
var minDistancePoints = GetMinDistancePoint(maxAreaContours[0], maxAreaContours[1]);
var distance = Math.Sqrt((minDistancePoints[0].X - minDistancePoints[1].X) * (minDistancePoints[0].X - minDistancePoints[1].X) + (minDistancePoints[0].Y - minDistancePoints[1].Y) * (minDistancePoints[0].Y - minDistancePoints[1].Y));
if (distance > rect.Width / 2) continue;
// 注意minDistancePoints中是mask局部坐标,转回resultImage全局坐标:
Cv2.Line(binary, minDistancePoints[0] + rect.TopLeft, minDistancePoints[1] + rect.TopLeft, Scalar.Black, lineThickness);
Cv2.Line(resultImage, minDistancePoints[0] + rect.TopLeft, minDistancePoints[1] + rect.TopLeft, Scalar.OrangeRed, lineThickness);
}
catch (Exception)
{
continue;
}
}
}
return new ProcessingResult(resultImage);
}
catch (Exception ex)
{
Console.WriteLine(ex);
return new ProcessingResult();
}
}
private Point[][] GetTop2MaxAreaContours(Point[][] contours)
{
if (contours == null || contours.Length == 0)
return new Point[0][];
// 按轮廓面积降序排序,取前2个
var top2 = contours.OrderByDescending(contour => Cv2.ContourArea(contour)).ToArray();
return top2;
}
private Point[] GetMinDistancePoint(Point[] contour, Point[] contour1)
{
if (contour == null || contour1 == null || contour.Length == 0 || contour1.Length == 0)
return new Point[0];
Point minP1 = new Point();
Point minP2 = new Point();
double minDist = double.MaxValue;
foreach (var p1 in contour)
{
foreach (var p2 in contour1)
{
double dist = Math.Sqrt((p1.X - p2.X) * (p1.X - p2.X) + (p1.Y - p2.Y) * (p1.Y - p2.Y));
if (dist < minDist)
{
minDist = dist;
minP1 = p1;
minP2 = p2;
}
}
}
return new Point[] { minP1, minP2 };
}上面是基于凸包凹陷的,那都说分水岭+距离变换好!!!但是,好是有前提的 对一同样大小颗粒的分割效果是很好的。但是对大小不一效果不太行,但是我也做了优化 下面给出大体逻辑。
一种基于距离变幻+分水岭 检测重叠轮廓分割的方法
前处理:的噼里啪啦我就不说了,根据样品来(灰度,滤波,二值化,形态学...)
进行距离变换 DistanceTransform+Normalize
获取前景标记 Cv2.Threshold(distTrans8u, distTrans8u, foregroundThreshold * 255, 255, ThresholdTypes.Binary);
创建标记图像 Mat markers = Mat.Zeros(binary.Size(), MatType.CV_32S);
标记背景 using var sureBg = new Mat();
Cv2.Dilate(binary, sureBg, new Mat(), iterations: 3);应用分水岭算法 Cv2.Watershed(originalMat, markers);
前面几步都是烂大街的 随便一搜都有的代码 不清楚的直接搜 距离变换+分水岭
得到轮廓并绘制在一张与原图大小相等的黑图上并把边界涂色
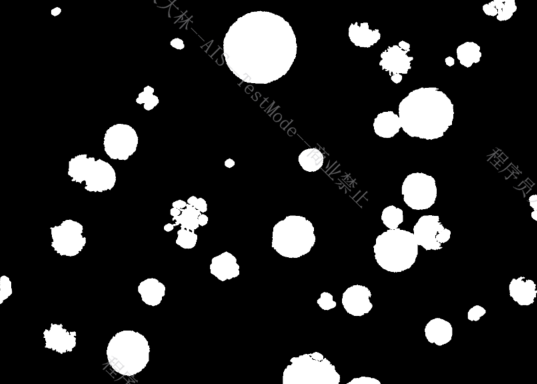
csresult = Mat.Zeros(originalMat.Size(), originalMat.Type()); var boundaries = new Mat(); Cv2.Compare(markers, new Scalar(-1), boundaries, CmpType.EQ); result.SetTo(new Scalar(255, 255, 255), boundaries); result.Row(0).SetTo(new Scalar(0, 0, 0)); result.Row(result.Rows - 1).SetTo(new Scalar(0, 0, 0)); result.Col(0).SetTo(new Scalar(0, 0, 0)); result.Col(result.Cols - 1).SetTo(new Scalar(0, 0, 0)); boundaries.Dispose();上一步得到了所谓分水岭的轮廓,但是很有可能把你的小轮廓给干掉了 或者说正常的轮廓,那么我们需要合并:
这是分水岭前后的图片,会发现少了很多。其实也不多就那几个。
1.原图减去分水岭得到的二值图 再做形态学处理得到 图4

2.合并分水岭二值图与图四
至于效果我觉得一般 逻辑嘛也觉得一般 我就是菜鸡。


打个总结,牛马不如骡子。