要构建自定义模型,需完成两个核心步骤:继承 nn.Module 类;重载 init 方法(初始化)和 forward 方法(前向计算)
神经网络的构造
初始化方法(init)
python
def __init__(self, **kwargs):
# 调用父类构造函数,确保Module的初始化逻辑被执行
super(MLP, self).__init__(** kwargs)
# 定义隐藏层:输入784维,输出256维
self.hidden = nn.Linear(784, 256)
# 定义激活函数
self.act = nn.ReLU()
# 定义输出层:输入256维,输出10维
self.output = nn.Linear(256, 10)super(MLP, self).init(**kwargs)这行代码非常重要,它会调用父类 Module 的构造函数,完成必要的初始化工作;self.hidden、self.act、self.output这些是我们定义的网络组件
**kwargs 是一个特殊的语法,用于在函数定义时接收任意数量的关键字参数(Keyword Arguments)。** 的作用是将参数收集为一个字典(dict),键为参数名,值为参数值。必须放在函数参数列表的末尾,否则会报错。

前向传播方法(forward)
python
def forward(self, x):
o = self.act(self.hidden(x)) # 输入→隐藏层→激活函数
return self.output(o) # 激活结果→输出层输入 x 首先通过隐藏层 self.hidden 进行线性变换;变换结果通过激活函数 self.act(ReLU)引入非线性特性;最后通过输出层 self.output 得到最终输出
我们只需要定义前向传播,反向传播会由 PyTorch 的自动求导机制自动生成
创建模型实例
python
net = MLP() # 实例化MLP模型
print(net) # 打印模型结构输出:
python
MLP(
(hidden): Linear(in_features=784, out_features=256, bias=True)
(act): ReLU()
(output): Linear(in_features=256, out_features=10, bias=True)
)这表明我们的模型包含:
一个名为 hidden 的线性层(输入 784 维,输出 256 维)
一个 ReLU 激活函数层
一个名为 output 的线性层(输入 256 维,输出 10 维)
执行前向计算
python
X = torch.rand(2, 784)
output = net(X) # 执行前向计算
print(output)输出:
python
tensor([[ 0.0149, -0.2641, -0.0040, 0.0945, -0.1277, -0.0092, 0.0343, 0.0627,
-0.1742, 0.1866],
[ 0.0738, -0.1409, 0.0790, 0.0597, -0.1572, 0.0479, -0.0519, 0.0211,
-0.1435, 0.1958]], grad_fn=<AddmmBackward>)输出结果是一个形状为 (2, 10) 的张量,表示:2 个样本的输出,每个样本有 10 个输出值
这里并没有将
Module类命名为Layer(层)或者Model(模型)之类的名字,这是因为该类是一个可供⾃由组建的部件。它的子类既可以是⼀个层(如PyTorch提供的 Linear 类),⼜可以是一个模型(如这里定义的 MLP 类),或者是模型的⼀个部分。
神经网络中常见的层
不含模型参数的层
python
import torch
from torch import nn
class MyLayer(nn.Module):
def __init__(self, **kwargs):
super(MyLayer, self).__init__(**kwargs)
def forward(self, x):
return x - x.mean()
# 测试
layer = MyLayer()
print(layer(torch.tensor([1, 2, 3, 4, 5], dtype=torch.float)))
# 输出: tensor([-2., -1., 0., 1., 2.])这个层不含模型参数,作用是把输入减去均值后输出
- 无参数:不需要训练参数
- 功能单一:通常执行固定的数学变换
- 可复用:可以在多个模型中重复使用
含模型参数的自定义层
Parameter类其实是Tensor的子类,如果一个Tensor是Parameter,那么它会⾃动被添加到模型的参数列表里。所以在⾃定义含模型参数的层时,我们应该将参数定义成Parameter,除了直接定义成Parameter类外,还可以使⽤ParameterList和ParameterDict分别定义参数的列表和字典。
使用 ParameterList 管理参数列表
与普通 Python 列表的关键区别在于,nn.ParameterList会通知 PyTorch 这些是需要优化的参数。
python
class MyListDense(nn.Module):
def __init__(self):
super(MyListDense, self).__init__()
# 创建3个4x4的参数矩阵
self.params = nn.ParameterList([
nn.Parameter(torch.randn(4, 4)) for _ in range(3)
])
# 添加一个4x1的参数矩阵
self.params.append(nn.Parameter(torch.randn(4, 1)))
def forward(self, x):
for param in self.params:
x = torch.mm(x, param)
return x
# 测试
net = MyListDense()
print(net)使用 ParameterDict 管理参数字典
ParameterDict 用于管理带键名的参数字典,适合需要根据条件选择不同参数的场景:
python
class MyDictDense(nn.Module):
def __init__(self):
super(MyDictDense, self).__init__()
# 初始化参数字典
self.params = nn.ParameterDict({
'linear1': nn.Parameter(torch.randn(4, 4)),
'linear2': nn.Parameter(torch.randn(4, 1))
})
# 添加新参数
self.params.update({'linear3': nn.Parameter(torch.randn(4, 2))})
def forward(self, x, choice='linear1'):
return torch.mm(x, self.params[choice])
# 测试
net = MyDictDense()
print(net)
print(net(torch.randn(1, 4), 'linear2')) # 使用指定参数进行前向计算
自定义二维卷积层
python
import torch
from torch import nn
# 卷积运算(二维互相关)
def corr2d(X, K):
h, w = K.shape
X, K = X.float(), K.float()
Y = torch.zeros((X.shape[0] - h + 1, X.shape[1] - w + 1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i, j] = (X[i: i + h, j: j + w] * K).sum()
return Y
# 二维卷积层
class Conv2D(nn.Module):
def __init__(self, kernel_size):
super(Conv2D, self).__init__()
# 初始化卷积核参数
self.weight = nn.Parameter(torch.randn(kernel_size))
# 初始化偏置参数
self.bias = nn.Parameter(torch.randn(1))
def forward(self, x):
return corr2d(x, self.weight) + self.bias首先根据卷积核的大小确定输出特征图的尺寸,然后通过双重循环遍历输入的每个可能区域,在每个区域上执行元素级乘法并求和,得到对应位置的输出值。这个过程可以看作是使用一个小的矩阵(卷积核)在大矩阵(输入)上滑动,每次计算重叠区域的相似度。
自定义的 Conv2D 模块继承自 nn.Module,包含权重和偏置两个核心参数。权重参数表示卷积核,其形状由 kernel_size 参数指定,而偏置参数则为每个输出值添加一个可学习的常数。前向传播过程简单直接:调用 corr2d 函数执行卷积操作,然后添加偏置项。
卷积层的填充与步幅
保持输出尺寸与输入相同
这段代码展示了如何使用 PyTorch 的卷积层并通过填充 (padding) 操作保持输入输出尺寸相同。我们先看comp_conv2d辅助函数,它的作用是简化卷积操作的调用:将输入张量扩展为包含批量维度和通道维度的四维张量 (格式为批量, 通道, 高度, 宽度),然后通过卷积层计算输出,最后再移除批量和通道维度,返回二维的输出结果。
具体来看卷积层的定义:这里创建了一个nn.Conv2d实例,设置了输入通道数和输出通道数都为 1(处理单通道图像),卷积核大小为 3×3,并指定了两侧各填充 1 个像素。当卷积核在图像上滑动时,填充操作会在输入图像的边界周围添加额外的像素(默认填充值为 0),这样可以避免卷积操作导致的尺寸缩减。
在二维卷积操作中,输出尺寸的计算公式为:
输出高度 = (输入高度 + 2× 填充 - 卷积核高度) / 步长 + 1
输出宽度 = (输入宽度 + 2× 填充 - 卷积核宽度) / 步长 + 1
填充(padding)是指在输⼊高和宽的两侧填充元素(通常是0元素)。
例子中,参数设置如下:
- 输入尺寸:8×8
- 卷积核大小:3×3(高度 = 3,宽度 = 3)
- 填充(padding):1(两侧各填充 1 个像素)
- 步长(stride):默认值 1(代码中未显式指定)
当我们设置padding=1时,PyTorch 会在输入张量的上下左右各添加 1 行 / 列的零值像素。因此,实际参与卷积计算的输入尺寸变为:
原始高度 + 2×填充 = 8 + 2×1 = 10
原始宽度 + 2×填充 = 8 + 2×1 = 10对于 3×3 的卷积核,在填充后的 10×10 输入上滑动时,其中心点可以到达的有效区域为:
- 垂直方向:从第 2 行(索引 1)到第 9 行(索引 8),共 8 个位置
- 水平方向:从第 2 列(索引 1)到第 9 列(索引 8),共 8 个位置
因此有:
输出高度 = (10 - 3) / 1 + 1 = 7 + 1 = 8 输出宽度 = (10 - 3) / 1 + 1 = 7 + 1 = 8
python
import torch
from torch import nn
# 辅助函数:计算卷积结果
def comp_conv2d(conv2d, X):
X = X.view((1, 1) + X.shape) # 添加批量和通道维度
Y = conv2d(X)
return Y.view(Y.shape[2:]) # 移除批量和通道维度
# 3x3卷积核,两侧各填充1
conv2d = nn.Conv2d(in_channels=1, out_channels=1, kernel_size=3, padding=1)
X = torch.rand(8, 8) # 输入尺寸8x8
print(comp_conv2d(conv2d, X).shape) # 输出尺寸仍为8x8非对称填充与步幅
python
# 5x3卷积核,高度方向填充2,宽度方向填充1,步幅为(3, 4)
conv2d = nn.Conv2d(1, 1, kernel_size=(5, 3), padding=(2, 1), stride=(3, 4))
print(comp_conv2d(conv2d, X).shape) # 输出尺寸: [2, 2]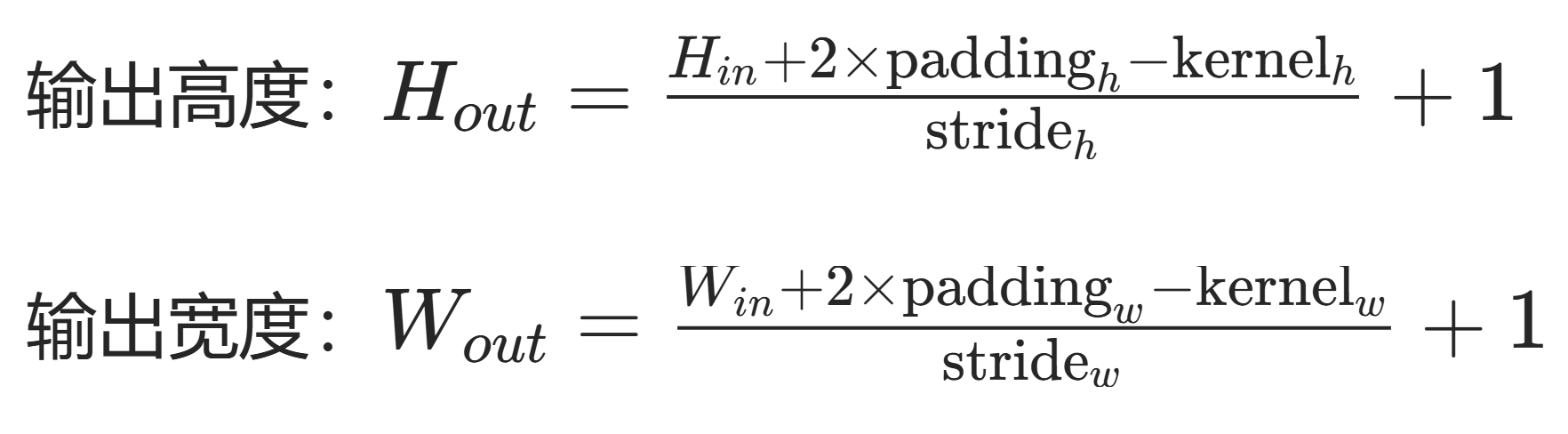
自定义池化层
池化层(Pooling Layer)是一种重要的下采样操作层,它的核心作用是通过对输入特征图的局部区域进行聚合计算,在减少特征图尺寸的同时保留关键信息。池化层就像一个 "信息筛选器",它会滑动过输入的特征图,对每个局部区域提取一个代表性的值,让特征图变得更紧凑。
python
import torch
from torch import nn
def pool2d(X, pool_size, mode='max'):
p_h, p_w = pool_size
Y = torch.zeros((X.shape[0] - p_h + 1, X.shape[1] - p_w + 1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
if mode == 'max':
Y[i, j] = X[i: i + p_h, j: j + p_w].max() # 最大池化
elif mode == 'avg':
Y[i, j] = X[i: i + p_h, j: j + p_w].mean() # 平均池化
return Y
# 测试
X = torch.tensor([[0, 1, 2], [3, 4, 5], [6, 7, 8]], dtype=torch.float)
print(pool2d(X, (2, 2))) # 最大池化结果
print(pool2d(X, (2, 2), 'avg')) # 平均池化结果pool2d函数模拟了池化操作的基本过程。它需要输入张量X、池化窗口大小pool_size,以及指定池化模式(最大池化或平均池化)。函数首先根据输入尺寸和池化窗口大小计算输出特征图的尺寸,输出高度为输入高度减去池化窗口高度再加 1,宽度同理,这和卷积操作中计算输出尺寸的逻辑类似,因为池化窗口也是通过滑动来覆盖输入的。然后通过两层循环遍历输出特征图的每个位置,对输入中对应池化窗口覆盖的局部区域进行聚合计算,得到输出特征图的每个元素。
**最大池化(Max Pooling)**是池化层中最常用的一种方式,它的计算逻辑是在每个池化窗口覆盖的局部区域内,选取数值最大的元素作为该区域的代表值。比如在测试用例中,输入X是一个 3×3 的张量\[0, 1, 2, 3, 4, 5, 6, 7, 8],使用 2×2 的池化窗口进行最大池化时,第一个窗口覆盖的区域是\[0, 1, 3, 4],其中最大的值是 4;第二个窗口覆盖\[1, 2, 4, 5],最大值是 5;第三个窗口覆盖\[3, 4, 6, 7],最大值是 7;第四个窗口覆盖\[4, 5, 7, 8],最大值是 8,所以输出的最大池化结果是\[4., 5., 7., 8.]。最大池化的优势在于能够突出局部区域中最显著的特征,比如图像中亮度最高的像素点,适合保留边缘、纹理等关键信息。
**平均池化(Average Pooling)**则是另一种常见的池化方式,它在每个池化窗口覆盖的局部区域内,计算所有元素的平均值作为该区域的代表值。同样以测试用例为例,2×2 池化窗口下,第一个窗口\[0, 1, 3, 4]的平均值是(0+1+3+4)/4 = 2;第二个窗口\[1, 2, 4, 5]的平均值是(1+2+4+5)/4 = 3;第三个窗口\[3, 4, 6, 7]的平均值是(3+4+6+7)/4 = 5;第四个窗口\[4, 5, 7, 8]的平均值是(4+5+7+8)/4 = 6,所以平均池化的输出结果是\[2., 3., 5., 6.]。平均池化的特点是能够平滑局部区域的特征,保留区域的整体趋势,避免个别极端值对特征的过度影响。
- 无参数:不需要训练参数
- 降维:减小特征图尺寸,降低计算复杂度
- 特征提取:保留主要特征,增强模型鲁棒性
模型示例
LeNet
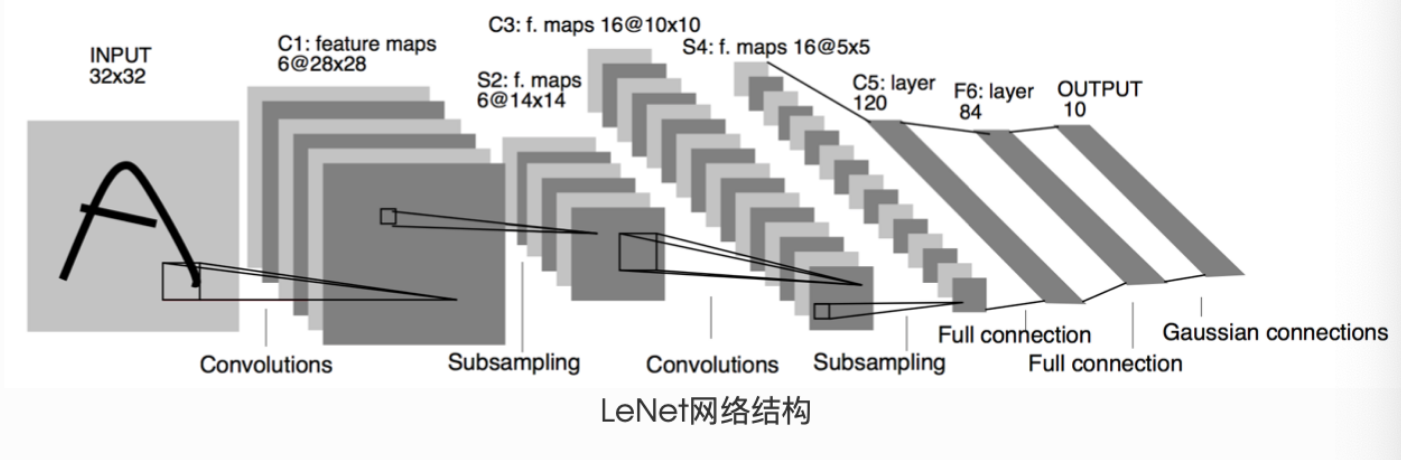
LeNet 是由深度学习先驱 Yann LeCun 于 1998 年提出的卷积神经网络,专门用于手写数字识别任务。作为早期卷积神经网络的经典代表,LeNet 展示了卷积操作在图像处理中的强大能力,为后续深度学习的发展奠定了重要基础。
LeNet 采用了卷积层 + 池化层 + 全连接层的经典组合结构,其核心思想是利用卷积操作提取图像局部特征,通过池化层降低特征维度,最后通过全连接层完成分类。标准 LeNet-5 结构包含 7 层(不含输入层),分为特征提取和分类两个部分:
- 特征提取部分:由 2 个卷积层和 2 个池化层交替组成
- 分类部分:由 3 个全连接层组成
一个神经网络的典型训练过程如下:
定义包含一些可学习参数(或者叫权重)的神经网络
在输入数据集上迭代
通过网络处理输入
计算 loss (输出和正确答案的距离)
将梯度反向传播给网络的参数
更新网络的权重,一般使用一个简单的规则:
weight = weight - learning_rate * gradient
python
Net(
(conv1): Conv2d(1, 6, kernel_size=(5, 5), stride=(1, 1)) # 第一个卷积层
(conv2): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1)) # 第二个卷积层
(fc1): Linear(in_features=400, out_features=120, bias=True) # 第一个全连接层
(fc2): Linear(in_features=120, out_features=84, bias=True) # 第二个全连接层
(fc3): Linear(in_features=84, out_features=10, bias=True) # 第三个全连接层
)网络初始化(__init__ 方法)
python
import torch
import torch.nn as nn
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
# 输入图像channel:1;输出channel:6;5x5卷积核
self.conv1 = nn.Conv2d(1, 6, 5)
self.conv2 = nn.Conv2d(6, 16, 5)
# 全连接层:y = Wx + b
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)- conv1:输入通道数 = 1(灰度图像),输出通道数 = 6,卷积核大小 = 5×5
- conv2:输入通道数 = 6(上一层输出),输出通道数 = 16,卷积核大小 = 5×5
- fc1:输入特征数 = 16×5×5(上一层输出展平后),输出特征数 = 120
- fc2:输入特征数 = 120,输出特征数 = 84
- fc3:输入特征数 = 84,输出特征数 = 10(对应 10 个类别)
前向传播(forward 方法)
python
def forward(self, x):
# 第一层:卷积 → ReLU激活 → 2x2最大池化
x = F.max_pool2d(F.relu(self.conv1(x)), (2, 2))
# 第二层:卷积 → ReLU激活 → 2x2最大池化(方阵可简化参数)
x = F.max_pool2d(F.relu(self.conv2(x)), 2)
# 展平特征图:将多维特征转为一维向量
x = x.view(-1, self.num_flat_features(x))
# 第三层:全连接 → ReLU激活
x = F.relu(self.fc1(x))
# 第四层:全连接 → ReLU激活
x = F.relu(self.fc2(x))
# 输出层:全连接(无激活函数,通常配合softmax使用)
x = self.fc3(x)
return x
python
输入图像 [batch_size, 3, 224, 224]
↓ 第一层卷积+池化 [batch_size, 16, 112, 112]
↓ 第二层卷积+池化 [batch_size, 32, 56, 56]
↓ 展平 [batch_size, 100352]
↓ 全连接层1 [batch_size, 1024]
↓ 全连接层2 [batch_size, 512]
↓ 输出层 [batch_size, 10]辅助函数:特征展平计算
python
def num_flat_features(self, x):
size = x.size()[1:] # 除去批处理维度的其他所有维度
num_features = 1
for s in size:
num_features *= s
return num_features在卷积神经网络中,当我们从卷积层过渡到全连接层时,需要将多维的特征图(例如batch_size, channels, height, width)展平为一维向量。这个函数就是用来计算展平后的向量长度的。
LeNet 的参数与计算特性
python
params = list(net.parameters())
print(f"参数总数: {len(params)}")
print(f"conv1权重维度: {params[0].size()}") # conv1的权重参数输出:
python
参数总数: 10
conv1权重维度: torch.Size([6, 1, 5, 5])每个卷积层包含:权重参数(out_channels × in_channels × kH × kW)+ 偏置参数(out_channels)
每个全连接层包含:权重参数(out_features × in_features)+ 偏置参数(out_features)
总参数计算:卷积层参数 + 全连接层参数 = 10 组参数(5 层 ×2 组参数 / 层)
前向传播测试
python
# 创建随机输入:batch_size=1,通道=1,高=32,宽=32
input = torch.randn(1, 1, 32, 32)
# 前向传播计算
out = net(input)
print(out) # 输出10个类别的原始分数(logits)输出:
python
tensor([[ 0.0672, -0.0743, 0.1058, -0.0181, 0.0536, 0.0736, -0.0764, -0.0423,
0.0332, -0.0425]], grad_fn=<AddmmBackward>)反向传播
python
# 清零所有参数的梯度缓存
net.zero_grad()
# 随机创建梯度张量,模拟反向传播
out.backward(torch.randn(1, 10))torch.nn包对输入数据的处理要求 ------ 它只支持小批量(mini-batches)样本输入,不直接接受单个样本。这意味着无论是卷积层、全连接层还是其他网络层,输入张量都需要包含批量维度。例如nn.Conv2d要求输入是 4 维张量,形状为nSamples x nChannels x Height x Width,其中nSamples就是批量大小。如果只有单个样本,需要用input.unsqueeze(0)在第 0 维添加一个 "假的" 批量维度,把形状从nChannels x Height x Width变成1 x nChannels x Height x Width,这样才能被网络层正确处理。
AlexNet
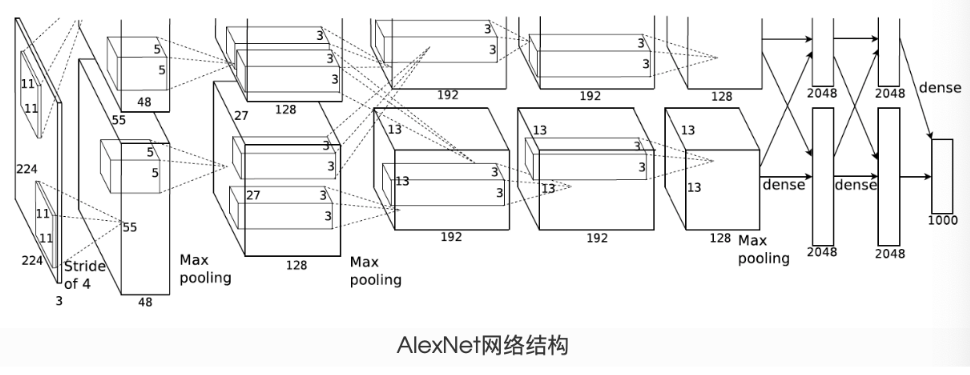
AlexNet 是由 Alex Krizhevsky、Ilya Sutskever 和 Geoffrey Hinton 在 2012 年提出的卷积神经网络,它在当年的 ImageNet 大规模视觉识别挑战赛 (ILSVRC) 中以显著优势夺冠,标志着深度学习在计算机视觉领域的突破性进展。AlexNet 的成功开启了深度学习的黄金时代,其架构设计理念深刻影响了后续神经网络的发展。
AlexNet 由 5 个卷积层和 3 个全连接层组成,总参数超过 6000 万个。网络结构分为两部分:
- 特征提取部分:由卷积层和池化层构成,负责提取图像特征
- 分类部分:由全连接层构成,负责基于提取的特征进行分类
| 层操作 | 输入维度 | 操作细节 | 输出维度 |
|---|---|---|---|
| conv1 | (1, 1, 224, 224) | 11×11 卷积,步长 4,96 通道 | (1, 96, 54, 54) |
| ReLU + 池化 | (1, 96, 54, 54) | 3×3 池化,步长 2 | (1, 96, 26, 26) |
| conv2 | (1, 96, 26, 26) | 5×5 卷积,步长 1,填充 2,256 通道 | (1, 256, 26, 26) |
| ReLU + 池化 | (1, 256, 26, 26) | 3×3 池化,步长 2 | (1, 256, 12, 12) |
| conv3 | (1, 256, 12, 12) | 3×3 卷积,步长 1,填充 1,384 通道 | (1, 384, 12, 12) |
| conv4 | (1, 384, 12, 12) | 3×3 卷积,步长 1,填充 1,384 通道 | (1, 384, 12, 12) |
| conv5 | (1, 384, 12, 12) | 3×3 卷积,步长 1,填充 1,256 通道 | (1, 256, 12, 12) |
| ReLU + 池化 | (1, 256, 12, 12) | 3×3 池化,步长 2 | (1, 256, 5, 5) |
| 展平 | (1, 256, 5, 5) | 多维转一维 | (1, 6400) |
| fc1 | (1, 6400) | 全连接到 4096 维 | (1, 4096) |
| fc2 | (1, 4096) | 全连接到 4096 维 | (1, 4096) |
| fc3 | (1, 4096) | 全连接到 10 维 | (1, 10) |
| 特性 | LeNet | AlexNet |
|---|---|---|
| 网络深度 | 5 层(2 卷积 + 3 全连接) | 8 层(5 卷积 + 3 全连接) |
| 激活函数 | Sigmoid/Tanh | ReLU |
| 正则化 | 无 | Dropout(丢弃率 0.5) |
| 卷积核大小 | 5×5 | 11×11、5×5、3×3 |
| 通道数 | 6→16 | 96→256→384→384→256 |
| 全连接层维度 | 120→84→10 | 4096→4096→10 |
| 数据增强 | 无 | 有(随机裁剪、水平翻转等) |
| 计算平台 | CPU | GPU |