开发流程
- 引脚初始化
- 引脚功能定义
- 实现读操作
- 实现写操作
GD32F4软件I2C初始化
void SoftI2C_init() {
// 时钟配置
rcu_periph_clock_enable(SCL_RCU);
// 设置输出模式
gpio_mode_set(SCL_PORT, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, SCL_PIN);
gpio_output_options_set(SCL_PORT, GPIO_OTYPE_OD, GPIO_OSPEED_50MHZ, SCL_PIN);
// 时钟配置
rcu_periph_clock_enable(SDA_RCU);
// 设置输出模式
gpio_mode_set(SDA_PORT, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, SDA_PIN);
gpio_output_options_set(SDA_PORT, GPIO_OTYPE_OD, GPIO_OSPEED_50MHZ, SDA_PIN);
}
GD32F4软件I2C引脚功能
#define SCL_RCU RCU_GPIOB
#define SCL_PORT GPIOB
#define SCL_PIN GPIO_PIN_6
#define SCL_AF GPIO_AF_4
#define SDA_RCU RCU_GPIOB
#define SDA_PORT GPIOB
#define SDA_PIN GPIO_PIN_7
#define SDA_AF GPIO_AF_4
/************** io ***************/
#define SCL(BIT) gpio_bit_write(SCL_PORT, SCL_PIN, BIT?SET:RESET)
#define SDA(BIT) gpio_bit_write(SDA_PORT, SDA_PIN, BIT?SET:RESET)
#define SDA_STATE() gpio_input_bit_get(SDA_PORT, SDA_PIN)
#define SDA_IN() gpio_mode_set(SDA_PORT, GPIO_MODE_INPUT, GPIO_PUPD_NONE, SDA_PIN)
#define SDA_OUT() gpio_mode_set(SDA_PORT, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, SDA_PIN)
- IO引脚定义
- 引脚输出模式高低电平输出:SCL高和低,SDA高和低
- SDA模式配置:SDA输出模式,SDA输入模式
- SDA输入模式状态读取。
写操作
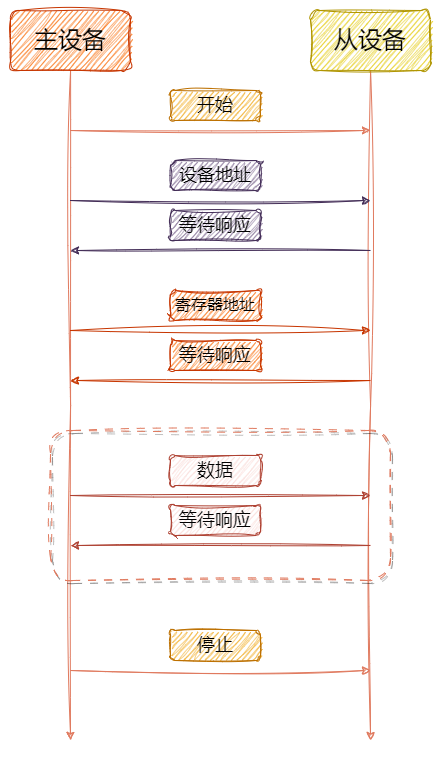
uint8_t SoftI2C_write(uint8_t addr, uint8_t reg, uint8_t* data, uint32_t len) {
start();
send(addr << 1); //发送设备写地址
if(wait_ack()) return 1; //等待响应
send(reg); //发送寄存器地址
if(wait_ack()) return 2; //等待响应
do {
send(*data++);
if(wait_ack()) return 3;
} while(--len);
stop();
return 0;
}
读操作
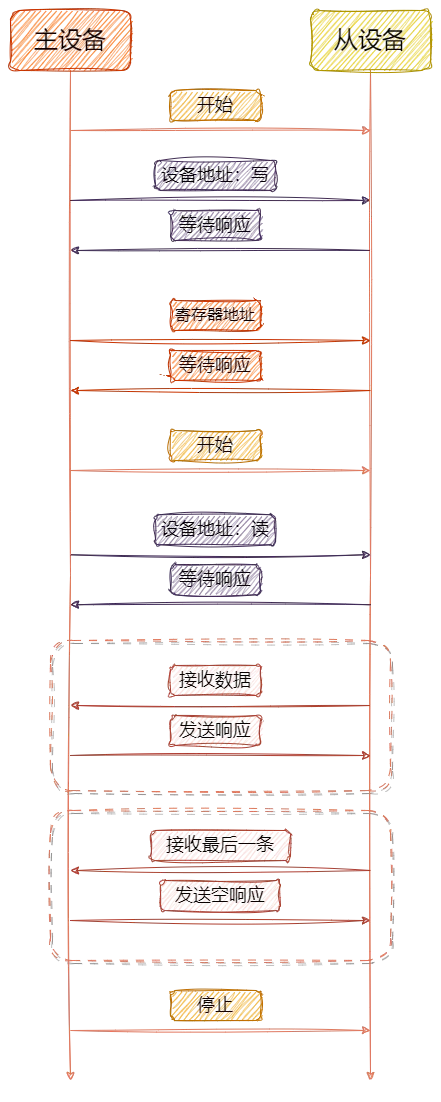
uint8_t SoftI2C_read(uint8_t addr, uint8_t reg, uint8_t* data, uint32_t len) {
start();
send(addr << 1); //发送设备写地址
if(wait_ack()) return 1; //等待响应
send(reg); //发送寄存器地址
if(wait_ack()) return 2; //等待响应
start();
send((addr << 1) | 0x01); //发送设备读地址
if(wait_ack()) return 3; //等待响应
do {
*data = recv();
data++;
if(len != 1) send_ack(); // 发送 ACK
} while(--len);
send_nack(); // 发送 NACK
stop();
return 0;
}