文章目录
- [1. 4.X.X SDK 更新](#1. 4.X.X SDK 更新)
-
- [1.1 国内下载地址](#1.1 国内下载地址)
- [1.2 国外下载地址](#1.2 国外下载地址)
- [1.3 修改相机参数](#1.3 修改相机参数)
-
- [1.3.1 修改percipio.launch文件:](#1.3.1 修改percipio.launch文件:)
- [1.3.2 通过看图软件修改参数](#1.3.2 通过看图软件修改参数)
- [1.4 订阅话题](#1.4 订阅话题)
-
- [1.4.1 订阅深度图Topic](#1.4.1 订阅深度图Topic)
- [1.4.2 订阅彩色图Topic](#1.4.2 订阅彩色图Topic)
- [1.4.3 订阅点云图Topic](#1.4.3 订阅点云图Topic)
- [1.4.4 订阅彩色点云图Topic](#1.4.4 订阅彩色点云图Topic)
- [2. 4.X.X SDK版本常见问题](#2. 4.X.X SDK版本常见问题)
- [2.1 启用时域滤波后,运行python3 depth.py无法立即输出深度图,怎么办?](#2.1 启用时域滤波后,运行python3 depth.py无法立即输出深度图,怎么办?)
- [2.2 相机实际输出的图像格式或分辨率为什么未按照看图软件中的配置?](#2.2 相机实际输出的图像格式或分辨率为什么未按照看图软件中的配置?)
- [2.3 点云缩放到最大值后仍显示过小,如何解决?](#2.3 点云缩放到最大值后仍显示过小,如何解决?)
1. 4.X.X SDK 更新
SDK下载地址:ROS1版本SDK
1.1 国内下载地址
使用浏览器下载:
cpp
https://gitee.com/percipioxyz/camport_ros.git。使用 git 指令获取本地副本:打开终端,切换到需存放 SDK 的工作目录下,输入 git clone 命令克隆远程仓库。
cpp
git clone https://gitee.com/percipioxyz/camport_ros.git1.2 国外下载地址
使用浏览器下载:
cpp
https://github.com/percipioxyz/camport_ros.git。使用 git 指令获取本地副本:打开终端,切换到需存放 SDK 的工作目录下,输入 git clone 命令克隆远程仓库。
cpp
git clone https://github.com/percipioxyz/camport_ros.gitSDK 4.X.X的SDK编译过程和3.X.X版本一样。
详情可参考如下链接:ROS1 4.X.X版本SDK编译流程
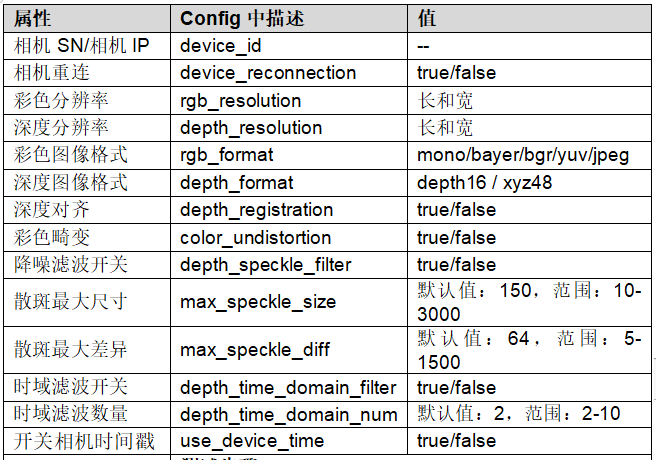
1.3 修改相机参数
1.3.1 修改percipio.launch文件:
在 percipio.launch 文件中配置相机参数。该方法只能设置 percipio.launch 文件中包含的参数,具体步骤如下:
执行以下命令,打开 percipio.launch 文件:
cpp
cd src/percipio_launch/launch/
gedit percipio.launch percipio.launch文件中的属性如下图,根据需要修改配置。
详细情况可参看如下链接:
1.3.2 通过看图软件修改参数
通过Percipio Viewer软件或 SDK 设置相机参数。
1.GigE2.0相机(除PMD系列与 GM系列以外的相机)
通过 Percipio Viewer 或 Camport SDK 3.X.X 将参数保存至相机 Storage 区,ROS 启动时将自动加载 storage 区的参数配置并开始采集图像。
2.GigE2.1相机(PMD 系列与 GM 系列相机)
通过 Camport SDK 4.X.X或新版 Percipio Viewer 设置相机默认加载目标 User Set 属性组,相机上电后将自动加载该 User Set 属性组的参数配置
1.4 订阅话题
1.4.1 订阅深度图Topic
depth.py:使能指定相机采集指定图像格式和分辨率的深度图像。
启动相机节点后,另开一个终端,切换到 src/percipio_launch路径下。输入
cpp
python3 depth.py 并运行,弹出的窗口将实时显示指定相机的深度图像。
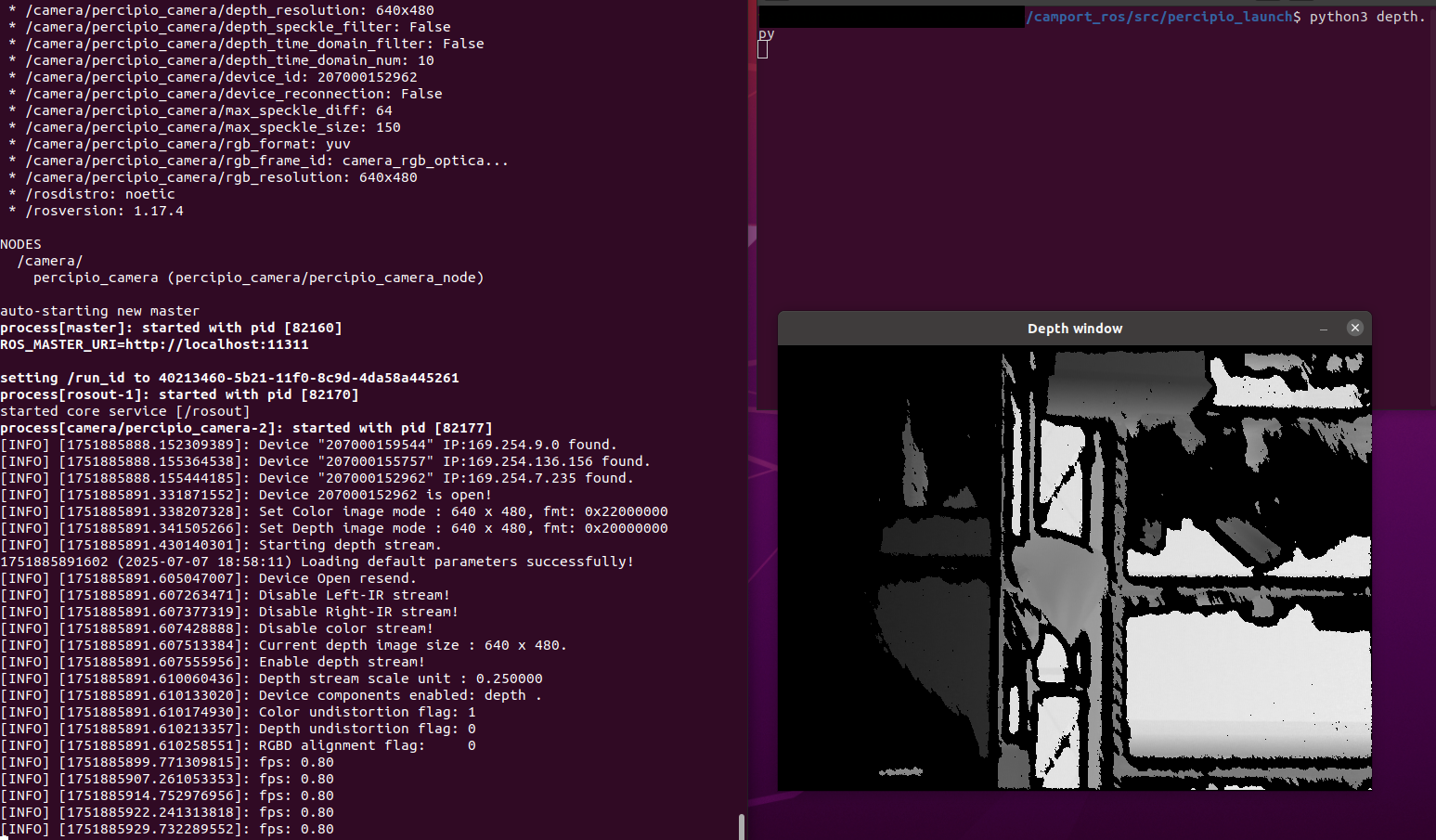
订阅深度图Topic
1.4.2 订阅彩色图Topic
color.py:使能指定相机采集到指定图像格式和分辨率的彩色图像。
启动相机节点后,另开一个终端,切换到 "src/percipio_launch" 路径下。输入
cpp
python3 color.py 并运行,弹出的窗口将实时显示指定相机的 color 图像。
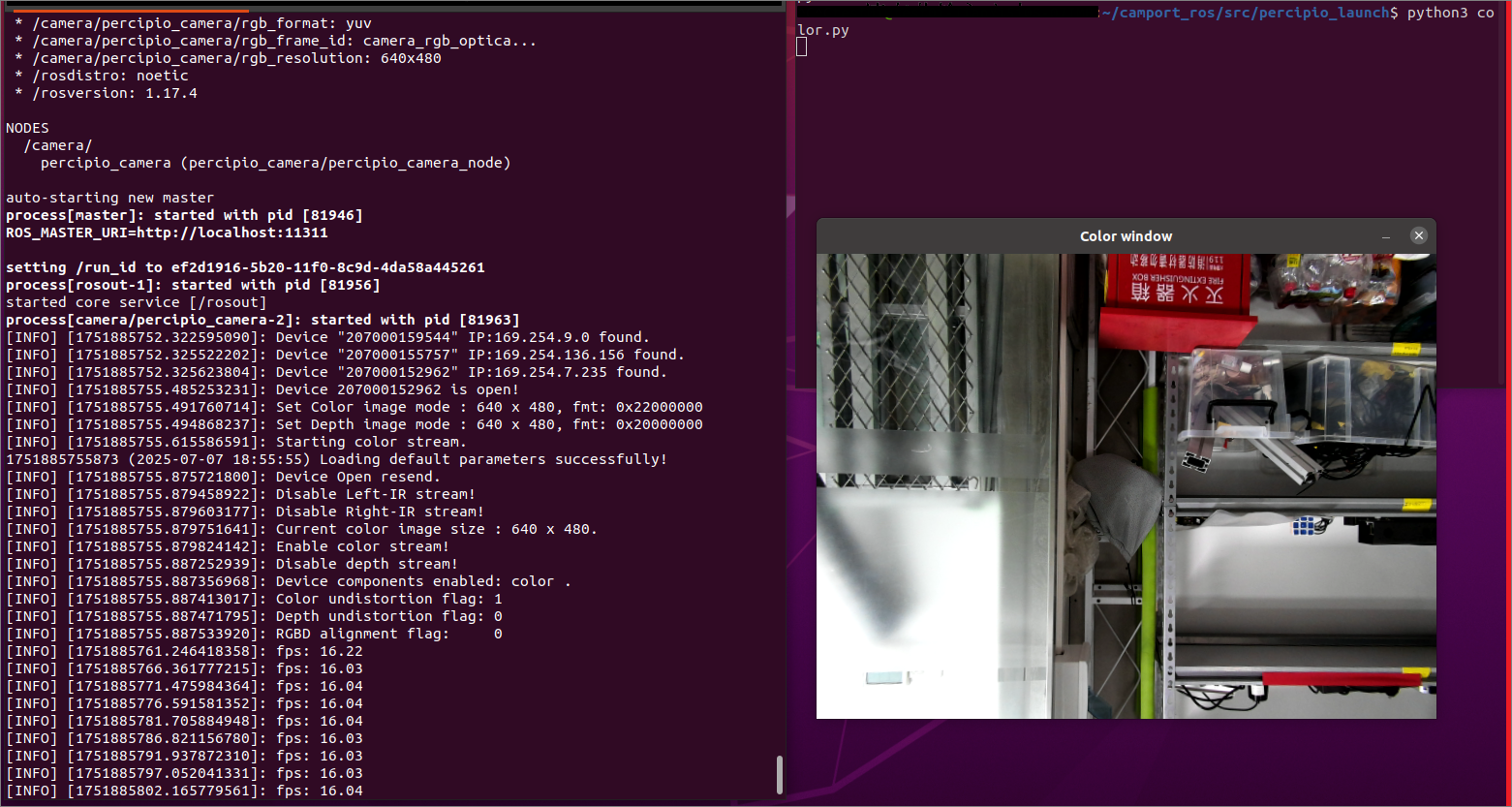
订阅彩色图Topic
1.4.3 订阅点云图Topic
cloud.py:使能指定相机采集到指定图像格式和分辨率的点云并保存。
启动相机节点后,另开一个终端,切换到 "src/percipio_launch" 路径下。输入
cpp
python3 cloud.py 并运行,弹出的窗口将实时显示指定相机的原始点云。同时,该终端将打印点云保存路径与点云点数。
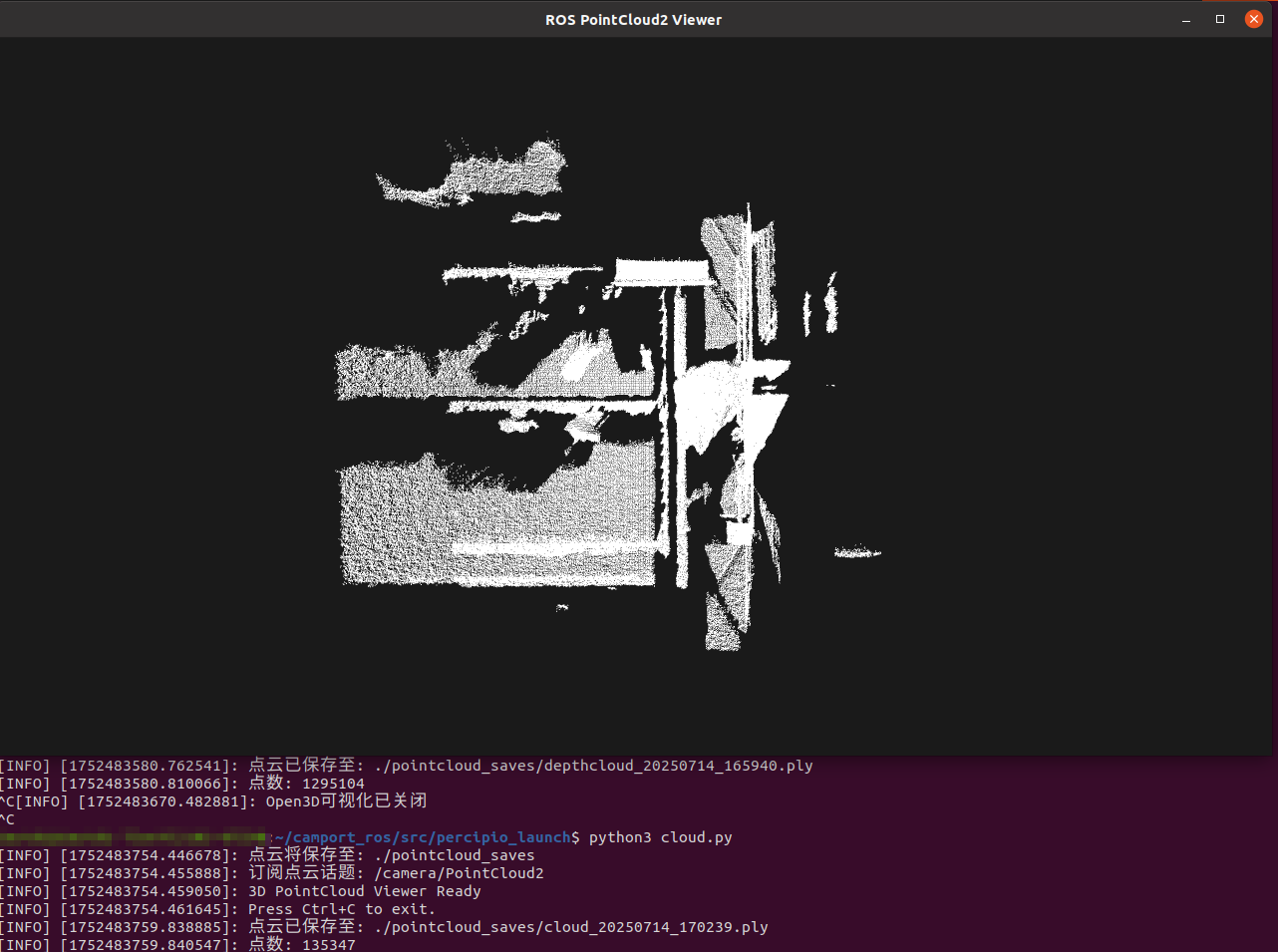
订阅点云图Topic
1.4.4 订阅彩色点云图Topic
depthcloud.py:使能指定相机采集指定图像格式和分辨率的彩色点云并保存。
在 percipio.launch 文件中,将 depth_registration 置为 true 并保存,启动相机节点。然后另开一个终端,切换到 "src/percipio_launch" 路径下。运行
cpp
python3 depthcloud.py 弹出的窗口将实时显示指定相机的彩色点云。同时,该终端将打印点云保存路径与点云点数。
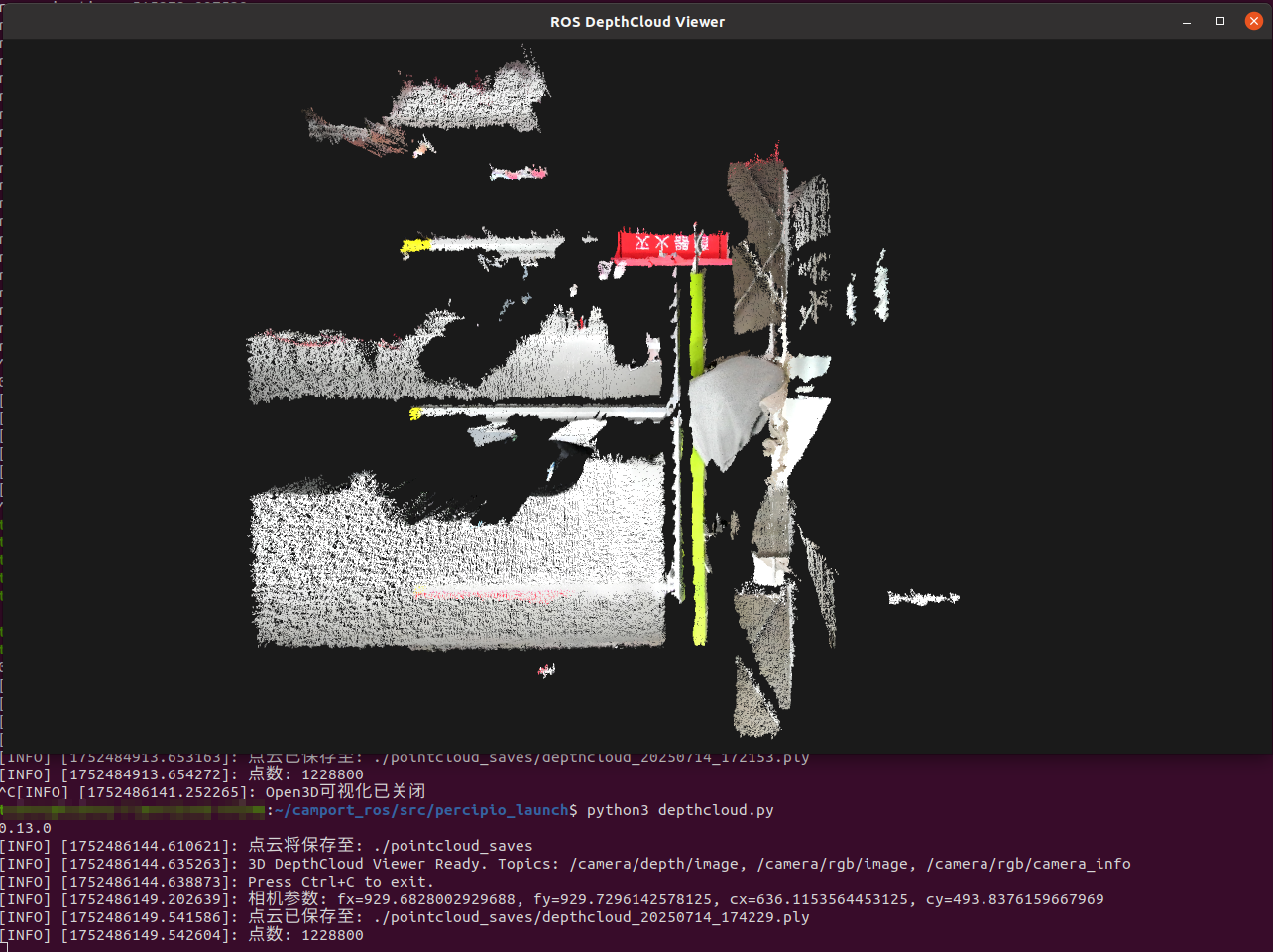
订阅彩色点云图Topic
2. 4.X.X SDK版本常见问题
2.1 启用时域滤波后,运行python3 depth.py无法立即输出深度图,怎么办?
时域滤波功能需先采集2-10帧原始深度数据填充缓冲区(具体帧数可配置),经多帧时间域融合计算后才会输出深度图像,因此程序启动后会存在短暂延迟。
2.2 相机实际输出的图像格式或分辨率为什么未按照看图软件中的配置?
如相机存储区或者userset中设置了图像的格式和分辨率,且percipio.launch文件也配置了图像的分辨率和格式,那么,ROS优先通过aunch文件中配置的参数。
优先级规则 :userset 或相机存储区的配置 <percipio.launch 的参数设置,导致launch文件配置被覆盖。
2.3 点云缩放到最大值后仍显示过小,如何解决?
点云显示过小可能是由于噪点较多导致系统自动缩放时以离群点为基准,压缩了有效点云的显示范围。
打开降噪功能,过滤冗余噪点后,点云显示比例将恢复正常。
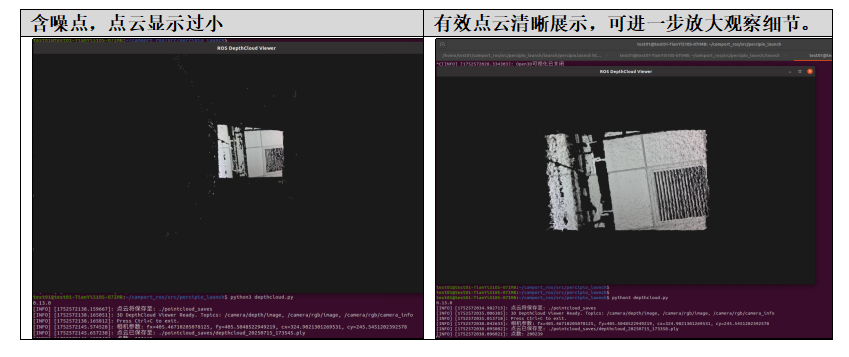
降噪前后对比图