文章目录
- 1.图漾相机设置IP
-
- [1.1 前期准备](#1.1 前期准备)
- 2.FM851-E2相机
-
- [2.1 FM851-E2适用场景](#2.1 FM851-E2适用场景)
- [2.2 FM851-E2 IO线和数据线定义](#2.2 FM851-E2 IO线和数据线定义)
-
- [2.2.1 IO接口定义](#2.2.1 IO接口定义)
- [2.2.2 数据接口线](#2.2.2 数据接口线)
- [2.2.3 相机正面安装方向](#2.2.3 相机正面安装方向)
- [2.2.4 相机IO指示灯](#2.2.4 相机IO指示灯)
- [2.3 FM851-E2/FM855-E2-7相机RGB颜色异常](#2.3 FM851-E2/FM855-E2-7相机RGB颜色异常)
- [2.4 FM851-E2相机成像质量差](#2.4 FM851-E2相机成像质量差)
- 3.M854-E1相机
-
- [3.1 FM854-E1适用场景](#3.1 FM854-E1适用场景)
- [3.2 FM854-E1 IO线和数据线定义](#3.2 FM854-E1 IO线和数据线定义)
-
- [3.2.1 IO接口定义](#3.2.1 IO接口定义)
- [3.2.2 数据接口线](#3.2.2 数据接口线)
- [3.2.3 相机正面安装方向](#3.2.3 相机正面安装方向)
- [3.2.4 相机IO指示灯](#3.2.4 相机IO指示灯)
- 4.M855-E1相机
-
- 4.1FM855-E1适用场景
- [4.2 FM851-E1 IO线和数据线定义](#4.2 FM851-E1 IO线和数据线定义)
-
- [4.2.1 IO接口定义](#4.2.1 IO接口定义)
- [4.2.2 数据接口线](#4.2.2 数据接口线)
- [4.2.3 相机正面安装方向](#4.2.3 相机正面安装方向)
- [4.2.4 相机IO指示灯](#4.2.4 相机IO指示灯)
- [4.3 FM855-E1 成像问题](#4.3 FM855-E1 成像问题)
-
- [4.3.1 黑色托盘成像差](#4.3.1 黑色托盘成像差)
- [4.3.2 点云噪点多](#4.3.2 点云噪点多)
- 5.TM26X之dTOF避障相机
-
- [5.1 TM262/TM265产品介绍](#5.1 TM262/TM265产品介绍)
- [5.2 TM262-E1/TM265-E1 IO线和数据线定义](#5.2 TM262-E1/TM265-E1 IO线和数据线定义)
-
- [5.2.1 IO接口定义](#5.2.1 IO接口定义)
- [5.2.2 数据接口线](#5.2.2 数据接口线)
- [5.2.3 TM262相机正面安装方向](#5.2.3 TM262相机正面安装方向)
- [5.2.4 TM265相机正面安装方向](#5.2.4 TM265相机正面安装方向)
- [5.2.5 相机IO指示灯](#5.2.5 相机IO指示灯)
- [5.3 TM26X成像问题](#5.3 TM26X成像问题)
-
- 5.3.1多台相机同时使用产生异常点云
- 【解决措施】:
- [5.3.2 倒车过程中,叉尖相机误避障](#5.3.2 倒车过程中,叉尖相机误避障)
- 【解决措施】
- 6.TM421之iTOF相机
-
- [6.1 TM421 工作场景](#6.1 TM421 工作场景)
- [6.2 TM421 IO线和数据线定义](#6.2 TM421 IO线和数据线定义)
-
- [6.2.1 IO接口定义](#6.2.1 IO接口定义)
- [6.2.2 数据接口线](#6.2.2 数据接口线)
- [6.2.3 TM421相机正面安装方向](#6.2.3 TM421相机正面安装方向)
- [6.2.4 相机IO指示灯](#6.2.4 相机IO指示灯)
- [6.3 TM421成像问题](#6.3 TM421成像问题)
-
- [6.3.1 附近有反光柱造成成像异常](#6.3.1 附近有反光柱造成成像异常)
- 6.3.2托盘上有高低反材质
- 【原因解释】:
- 【缓解措施】:
- [6.3.3 相机贴地安装/高亮地面等造成成像异常](#6.3.3 相机贴地安装/高亮地面等造成成像异常)
- 【原因解释】:
- 【缓解措施】:
- 6.3.4拍摄高反料卷
- 7.图漾相机共性操作
-
- [7.1 保存图像](#7.1 保存图像)
- [7.2 图漾相机常见错误码及解决措施](#7.2 图漾相机常见错误码及解决措施)
- [7.3 图漾相机如何计算视野?](#7.3 图漾相机如何计算视野?)
- [7.4 相机是否支持ISP功能?](#7.4 相机是否支持ISP功能?)
- 7.5图漾相机如何保存参数?
1.图漾相机设置IP
1.1 前期准备
1.一根超五类及其以上规格网线(cat5e、cat6...)
2.PercipioViewer2.6.1软件
小技巧1:
图漾相机出厂默认是自动IP,相机上电后,建议先将电脑上网络适配器改为自动获取IP后,通过PeripioViewe2.6.1软件连接一下相机,之后再将电脑上网络适配器改为静态IP后,再将相机设置为静态IP。
小技巧2:
建议使用最新版本PercipioViewer 2.6.1,在更改电脑主机网络适配器IP后,PercipioViewer2.6.1软件会自动更改默认网关和子网掩码。
将网线一端连接相机设备或者AGV小车控制器调试接口,另外一端与电脑直连,确定电脑网段操作如下:
详细IP操作可查看如下链接:
2.FM851-E2相机
2.1 FM851-E2适用场景
适用材质 :木质、普通蓝色塑料,金属托盘,带反光柱等场景。
特点 :波段830nm,抗光性较弱,不建议在有阳光斜射的场景使用,且建议托盘上边沿壁厚超过20mm,否则上边沿容易出现点云断裂现象。
不适用材质 :黑色等低反射率材质托盘。
不适用的现场环境:有阳光斜射、顶部有天窗或者黑暗环境下使用(如果使用深度学习+3D模版匹配,RGB亮度不够,造成识别率偏低)。
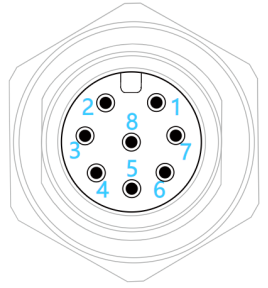
2.2 FM851-E2 IO线和数据线定义

触发结构外观
2.2.1 IO接口定义

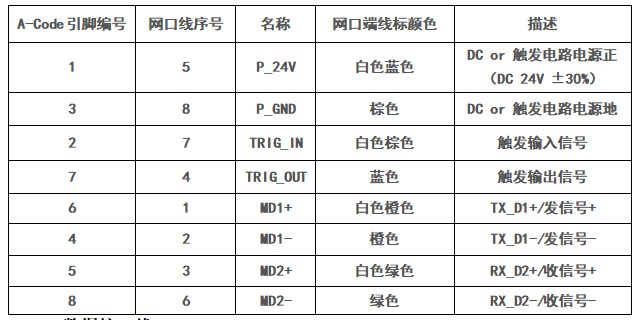
触发结构线序
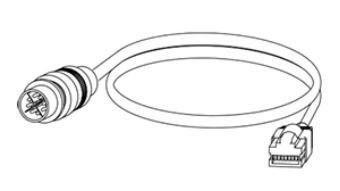
2.2.2 数据接口线
建议使用千兆以太网,如果相机在动态场景中使用,建议使用高柔以太网线。
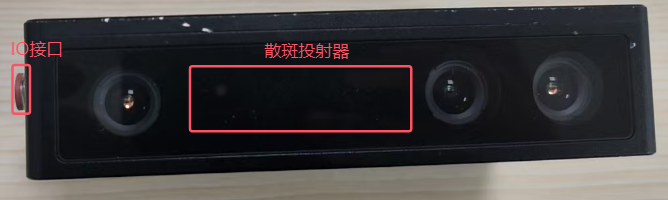
2.2.3 相机正面安装方向
FM851-E2相机的安装方向,有以下方式判断:

观察散斑投射器位置

相机散热面和黄色标签朝上
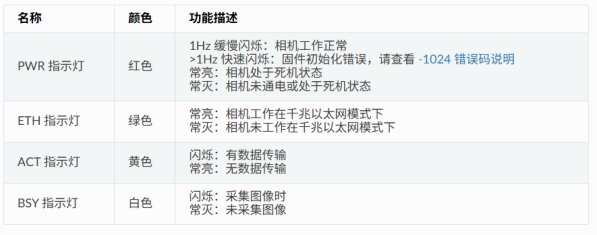
2.2.4 相机IO指示灯
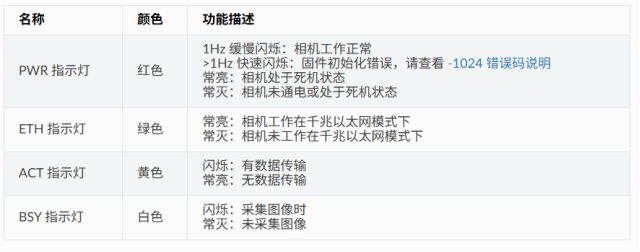
FM851-E2和FM855-E2-7相机状态指示灯如下图所示:
2.3 FM851-E2/FM855-E2-7相机RGB颜色异常
在实际应用场景中,FM851-E2相机由于RGB相机本身,没有硬ISP功能,常常会出现R/G/B三通道增益值设置的不合理,造成采集的图片成像异常。
1.碰到这种情况,首先要降低RGB的AnalogGain值,其次降低曝光值
2.同时建议把RGB三通道数值或者AutoISP功能。
【解决措施1】:
cpp
第一种:大概按照3:2:3的一个比例去设置R/G/B三通道的数值
//获取RGB支持的属性
bool hasRGB_ANALOG_GAIN, hasRGB_R_GAIN, hasRGB_G_GAIN, hasRGB_B_GAIN, hasRGB_EXPOSURE_TIME;
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_ANALOG_GAIN, &hasRGB_ANALOG_GAIN));
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_R_GAIN, &hasRGB_R_GAIN));
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_G_GAIN, &hasRGB_G_GAIN));
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_B_GAIN, &hasRGB_B_GAIN));
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_EXPOSURE_TIME, &hasRGB_EXPOSURE_TIME));
if (hasRGB_ANALOG_GAIN)
{
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_ANALOG_GAIN, 1));//设置RGB模拟增益[0,3]
}
if (hasRGB_R_GAIN)
{
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_R_GAIN, 32));//设置RGB数字增益R通道[0,255]
}
if (hasRGB_G_GAIN)
{
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_G_GAIN, 20));//设置RGB数字增益G通道[0,255]
}
if (hasRGB_B_GAIN)
{
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_B_GAIN, 32));//设置RGB数字增益B通道[0,255]
}
if (hasRGB_EXPOSURE_TIME)
{
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_EXPOSURE_TIME, 200));//设置RGB曝光时间【3,1088】
}【解决措施2】:
程序里设置AutonISP功能,具体操作如下:
1.首先初始化
cpp
TY_ISP_HANDLE hColorIspHandle = NULL;2.在调用RGB组件时,调用软ISP功能
cpp
///try to enable color camera
if(allComps & TY_COMPONENT_RGB_CAM && color)
{
LOGD("Has RGB camera, open RGB cam");
ASSERT_OK( TYEnableComponents(hDevice, TY_COMPONENT_RGB_CAM) );
//create a isp handle to convert raw image(color bayer format) to rgb image
ASSERT_OK(TYISPCreate(&hColorIspHandle));
//Init code can be modified in common.hpp
//NOTE: Should set RGB image format & size before init ISP
ASSERT_OK(ColorIspInitSetting(hColorIspHandle, hDevice));
//You can call follow function to show color isp supported features
#if 0
ColorIspShowSupportedFeatures(hColorIspHandle);
#endif
//You can turn on auto exposure function as follow ,but frame rate may reduce .
//Device may be casually stucked 1~2 seconds while software is trying to adjust device exposure time value
#if 0
ASSERT_OK(ColorIspInitAutoExposure(hColorIspHandle, hDevice));
#endif
}3.最后在关闭相机取流时,释放接口
cpp
ASSERT_OK( TYStopCapture(hDevice) );
ASSERT_OK( TYCloseDevice(hDevice));
ASSERT_OK( TYCloseInterface(hIface) );
ASSERT_OK(TYISPRelease(&hColorIspHandle));
ASSERT_OK( TYDeinitLib() );2.4 FM851-E2相机成像质量差
【问题描述】:
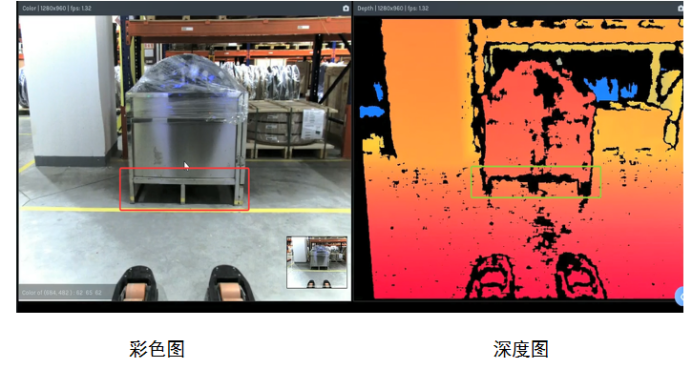
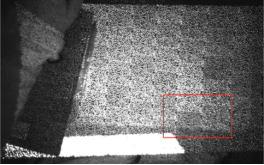
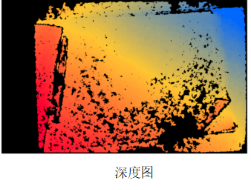
相机在拍摄下面金属托盘时,点云缺失严重,无法通过调整参数,形成较好的图像。
【排查过程】:
1.首先排查现场环境:
是否有侧窗或者顶部有阳光斜射,如FM851-E2相机,由于激光波段是830nm的,在有环境光干扰的工作环境下,信噪比不够,造成成像欠佳。
【解决措施 】:
1.前期方案评估时,尽量考虑到现场环境对相机的影响
2.如果相机已经在现场使用,先适当降低相机IR的AnalogGain参数和Gain参数,查看成像是否会好一些,如仍无法解决,考虑用FM855-E2-7平替。
2.现场材质因素:
1. 确认现场材质是否有黑色托盘等低反射率材质,此时调整相机参数,在2m以外,很难拿到比较好的成像;
2. 而如果是高反金属,此时需要适当降低激光亮度降低曝光、增益和模拟增益。
【解决措施 】:
黑色托盘属于低反材质,FM851-E2无法胜任此场景,建议切换成FM854-E1和FM855-E1,如现场结构和线缆不允许更换,建议使用FM855-E2-7相机。
3.相机参数设置不合理:
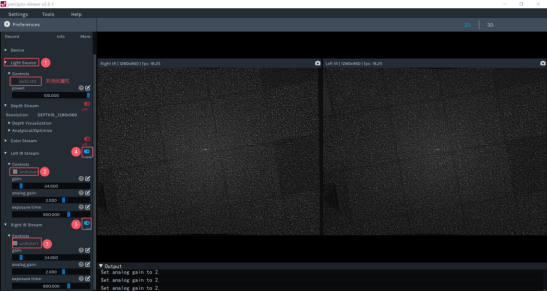
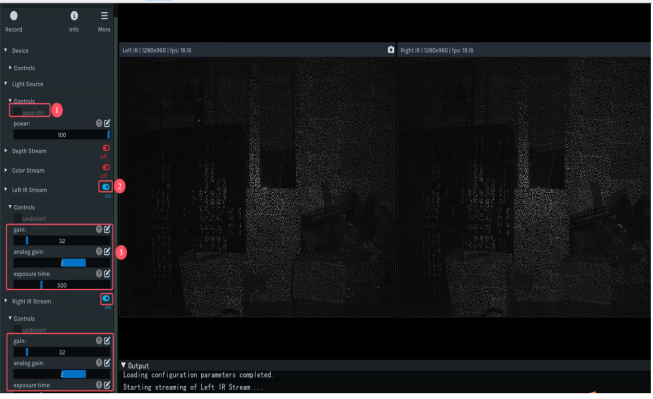
如果需要查看散斑相机的IR图,首先需要关闭light Source里面的auto ctrl属性,之后再打开左右相机IR图查看散斑信息,是否过曝,过亮,详细操作如下图:
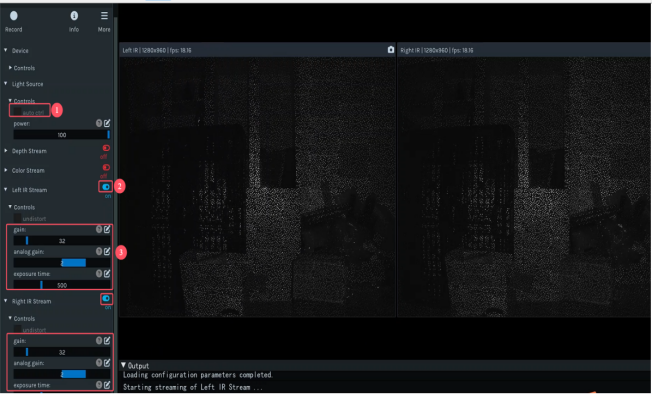
注意 :跟深度图相关的有IR Gain、IR AnalogGain和IR ExposureTime这三个参数可调,建议调节顺序为IR ExposureTime->IR AnalogGain->IR Gain 。
IR AnalogGain属性是对相机模拟信号进行放大,不建议设置过大,过大图像容易产生噪点。
【解决措施 】:
1.如调试参数不能得到一张比较好的深度图,建议联系图漾技术。
4.相机标定失效
由于运输过程或者其他因素,造成相机碰撞,或者相机散热未做好,导致相机散斑图出现模糊,从而使深度图成像较差,具体有以下两种方式去排查
方法一 :按照如下图所示操作,查看相机左右IR,同一个亮点,是否在同一水平线上。
方法二 :按照方法一的操作,可查看IR散斑是否有粘连或者模糊的情况,具体如下图:
相机左IR !在这里插入图片描述(https://i-blog.csdnimg.cn/direct/69f3c5831d32483d9ce5ae94284f5f29.png#pic_center) 相机右IR
左IR图的中心偏右下方比正常的模组要模糊一些。
【解决措施 】:
1.遇到此种情况,联系图漾技术确认后,需要返厂维修。
5.相机激光器损坏

需要相机打开取流,之后打开相机,若此处的散斑投射器没有发光,如未发光表示已损坏(可用安卓手机对着相机拍摄,看是否有激光闪烁),若损坏则需要寄回维修,更换激光器。
【解决措施 】:
1.遇到此种情况,联系图漾技术确认相机激光器损坏后后,需要返厂维修。
6.工作环境(主要是温度和湿度)
情况1 :如果在冷库或者偏北方的区域使用,有时候出现相机开机时正常,但工作一阵子后,深度图变差,查看此时IR图散斑图,呈模糊状,静止或者拆下来一会后,相机又成像正常;
情况2 :而如果频繁在冷库和室温环境来回切换,相机镜头表面有凝露,擦拭水珠后,成像又恢复正常。
情况3:相机在俄罗斯或者北方区域工作时,工作环境在0度以下,刚开始工作的时候,出现深度图比较差的情况,工作一阵子后,深度图逐渐正常。
【解决措施 】:
1.首先需要排除现场环境的干扰,之后排查是否有问题4和5现象。排查后如未发现问题,请联系图漾技术。
7.相机安装高度角度
根据实测数据,叉臂长度在 1.2 米之下时,安装高度在 0.35 米-0.45米左右;叉臂长度大于 1.2 米时,安装高度在在 0.45 米-0.8米左右。以上数据根据经验得出结论,不同的叉车会有差异。
相机与上表面的倾斜角度不建议操作30度,角度较大,容易对相机的立体匹配算法产生影响,同时对图像对齐会有些许影响,进而影响识别率。
【解决措施 】:
1.设计安装机构时,角度尽可能可调。
2.在相机工作范围内,如果倾斜角度较小,此时识别率较低,建议适当拉开相机与托盘的拍照距离。
8.相机工作距离偏远或者偏近
1.如在4m外拍摄蓝色托盘,托盘上边沿壁厚在20mm左右,此时托盘上边沿已经处于断裂状态。
2.测试过程中在700mm以内拍摄物体,属于相机工作盲区,无法成像。
3.相机的工作区间是在90%反射率下得出的。如果拍摄黑托盘等低反物体,尽量压缩工作区间。
3.M854-E1相机
3.1 FM854-E1适用场景
适用材质 :木质、普通蓝色塑料和黑色托盘(2m内对黑色托盘成像较好),带反光柱的场景。
特点:波段940nm,抗光性较强,适合室内,半室外等场景。
3.2 FM854-E1 IO线和数据线定义
3.2.1 IO接口定义

3.2.2 数据接口线
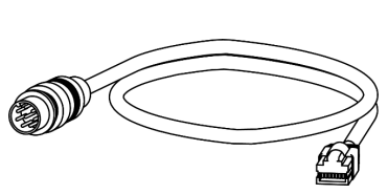
相机数据线如下图:
3.2.3 相机正面安装方向
FM854-E1正面方向如下:

3.2.4 相机IO指示灯
FM854-E1相机状态指示灯如下图所示:

相机出现问题后,可先通过相机指示灯判断相机状态,如ETH指示灯不亮,表明相机与控制器链接为百兆网,可以查看网线是否损坏或者两端连接口是否牢固。
4.M855-E1相机
4.1FM855-E1适用场景
适用材质 :复杂场景下的栈板识别,比如室内有阳光斜射,有天窗,高反材质,黑色托盘等等。
特点:波段940nm,抗光性较强。
4.2 FM851-E1 IO线和数据线定义
4.2.1 IO接口定义
FM854-E1相机状态指示灯如下图所示:
触发IO结构外观

IO触发结构线序
4.2.2 数据接口线
FM855-E1相机,网路数据线如下图所示:
如果相机在动态场景中使用,建议使用高柔线,非高柔线容易引发掉线问题。
4.2.3 相机正面安装方向
FM855-E1相机的安装方向,有以下方式判断:

FM855-E1散热面
观察IO和散斑投射器
4.2.4 相机IO指示灯
FM855-E1相机状态指示灯如下图所示:
4.3 FM855-E1 成像问题
4.3.1 黑色托盘成像差
此时需要查看散斑相机的IR图,首先需要关闭light Source里面的auto ctrl属性,之后再打开左右相机IR图查看散斑信息,是否过曝,过亮,详细操作如下图:
建议先将analog gain调整至1至2,之后调整gain至20~32区间,调整完毕后再打开深度图取流,观察深度图成像。
4.3.2 点云噪点多
搭配图漾PercipioViewer2.6.1软件时,FFM855-E1相机自带的SGBM属性会被隐藏,打开SGBM参数如下图:
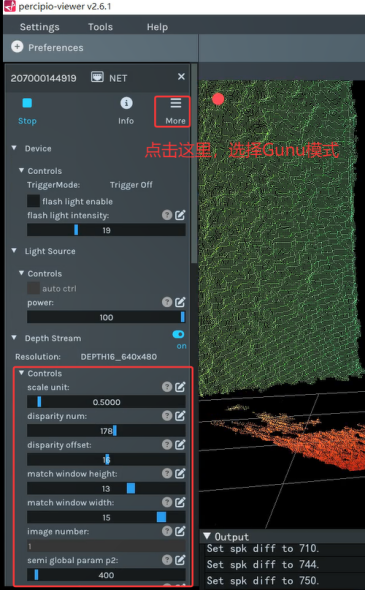
打开相机SGBM参数
5.TM26X之dTOF避障相机
5.1 TM262/TM265产品介绍
特点 :机身小巧易集成,适用于客流计、立体避障【TM262】和叉尖避障【TM265】等应用。
不适用场景:场景中有发光柱、识别3m外5cm以下黑色低反材质。
5.2 TM262-E1/TM265-E1 IO线和数据线定义
5.2.1 IO接口定义
相机的IO线定义如下:
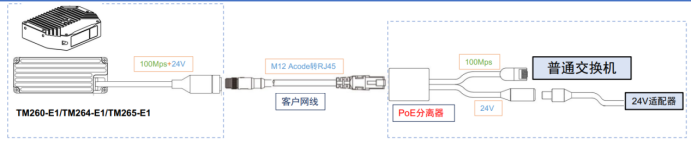
5.2.2 数据接口线
TM262/TM265相机数据链路连接如下图:
5.2.3 TM262相机正面安装方向
TM262相机正面安装方向如下,黄色标签在上:

5.2.4 TM265相机正面安装方向
TM265相机正面安装方向如下:

5.2.5 相机IO指示灯
TM26X相机的状态指示灯如下图:

如遇到相机状态指示灯不亮,请仔细检查相机硬件连接是否正常,供电是否正常。
5.3 TM26X成像问题
5.3.1多台相机同时使用产生异常点云
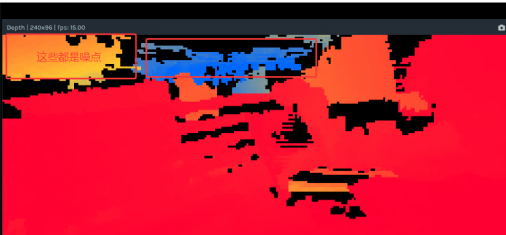
TM26X相机拍摄远方物体时,总是有莫名噪点产生,如下图所示:
【解决措施】:
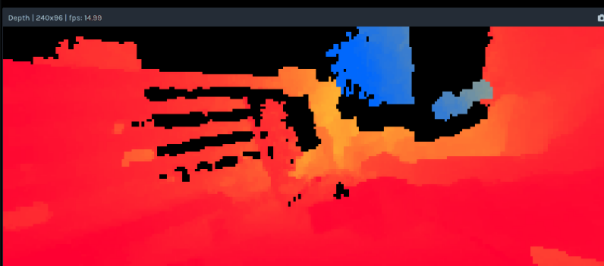
开启相机Depth Stream数据流中的 tof anti-interference功能,开启后实际效果如下图:
5.3.2 倒车过程中,叉尖相机误避障
###【问题描述 】:
TM26X插尖相机,在倒车过程中,偶发出现误避障问题。
###【排查过程 】:
通过保存的点云,观察如下图所示:
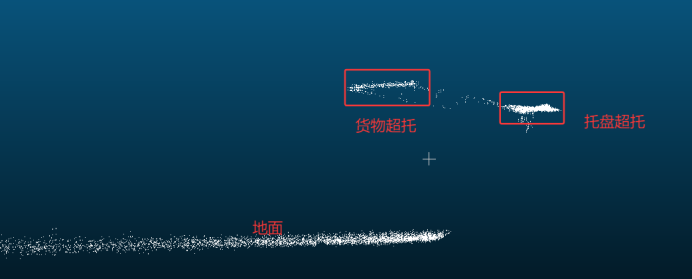
###【原因分析 】:
当托盘超出叉臂一部分,同时货物又超出叉臂一部分,叉尖相机只能看到托盘下表面和货物下表面,托盘上下表面有一个倾斜角,相机打出去的激光,打到托盘下表面和货物下表面,有反射的光线打到地面,又再次进入相机,在两者各超托间隙形成类似"拉丝"现象。

实际货物超托示意图
【解决措施】
比如之前设置的600,可适当改为1104/1105,可解决大部分"拉丝"现象。
注意1 :末尾数值越大,近处滤波倍率越大,末尾数值是9,过滤倍率最大,但容易丢失小目标物体。
注意2:使用此功能,需要TM262相机固件在1.2.21以上版本,TM265相机固件在1.0.28版本以上。
6.TM421之iTOF相机
6.1 TM421 工作场景
材质 :木质、蓝色等标准托盘,适合在室内,半室外等工作场景
不适宜场景:相机贴地安装,附近有高反物体(如反光柱),金属料卷等场景,如需要拍摄黑色材质,建议在2m以内,同时联系图漾技术更改相机寄存器配置。
6.2 TM421 IO线和数据线定义
6.2.1 IO接口定义
TM421相机的IO引脚定义如下:

6.2.2 数据接口线
TM421相机数据线如下图:
6.2.3 TM421相机正面安装方向
TM421相机正面安装方向如下:

6.2.4 相机IO指示灯
TM421相机的状态指示灯如下图:

6.3 TM421成像问题
6.3.1 附近有反光柱造成成像异常
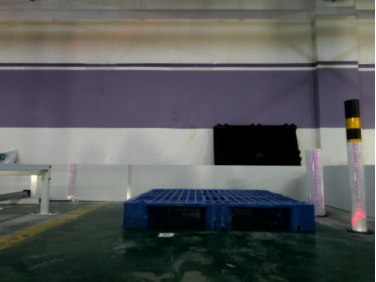
如下图实际场景所示,托盘附近有反光柱,造成点云异常。
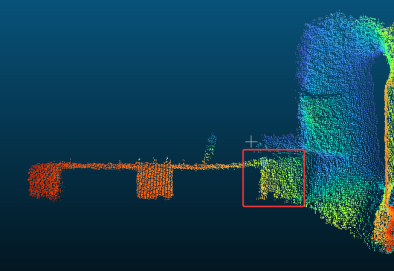
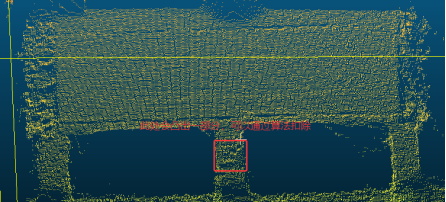
而实际成像点云图异常,如下图所示:
###【原因解释 】:
打开相机IR Stram数据流,会发现反光柱附近周边像素都很亮,造成光污染,从而引起反光柱附近的点云异常。
###【缓解措施 】:
首先降低IR Stream数据流,降低曝光时间,之后调整Depth Stream数据流,调整filter Threshold 数值在50~100之间。
6.3.2托盘上有高低反材质
托盘上有高低反二维码,实际场景如下图:

实际成像点云图,如下图所示:
【原因解释】:
打开相机IR Stram数据流,会发现二维码附近周边像素都很亮,造成光污染,从而引起二维码附近的点云异常。
【缓解措施】:
首先降低IR Stream数据流,降低曝光时间,之后调整Depth Stream数据流,将 depth quality模式改为high模式。
6.3.3 相机贴地安装/高亮地面等造成成像异常
实际成像点云图如下图所示:
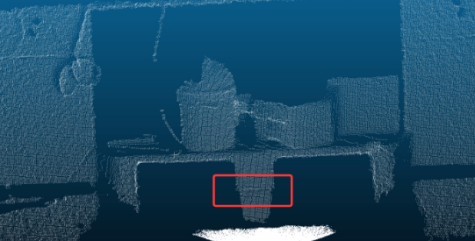
【原因解释】:
TOF相机由于地面串扰,会在高亮地面,靠近托盘处有点云镜像,建议把TOF相机放置在距离地面30cm公分以上,如需要贴地安装,建议使用双目散斑相机。
【缓解措施】:
首先降低IR Stream数据流,降低曝光时间,之后调整Depth Stream数据流,调整filter Threshold 数值在50~100之间。
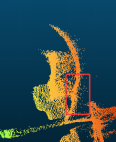
6.3.4拍摄高反料卷
拍摄高反圆柱料卷,会发现点云非圆柱状: 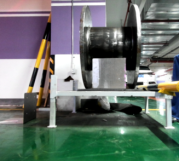
用iTOF相机拍摄,会发现点云如下图:
7.图漾相机共性操作
7.1 保存图像
图漾相机保存图像,可以打开如下链接,查看具体操作。
7.2 图漾相机常见错误码及解决措施
图漾官网给出了常见错误码及解决措施,具体可打开如下链接:
其他错误码解析,可打开如下链接:
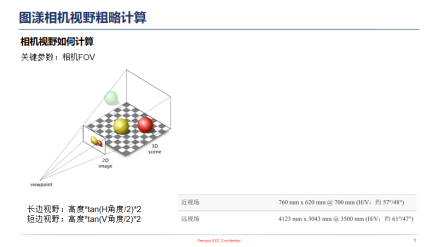
7.3 图漾相机如何计算视野?
7.4 相机是否支持ISP功能?
若图像输出YUYV格式,则相机带有硬件ISP模块。
若图像输出BAYER8GB格式,则相机需要使用AutoIsp功能
7.5图漾相机如何保存参数?
1.首先下载图漾PercipioViewer2.6.1 看图软件
2.正常给相机连接后,打开目标相机
3.根据实际情况调整相机属性,以达到最佳效果。
4.在设置完相机参数后,关闭所有相机取流。
5.点击菜单栏 Tools > Parameters,进入 Camera parameters configuration 页面。
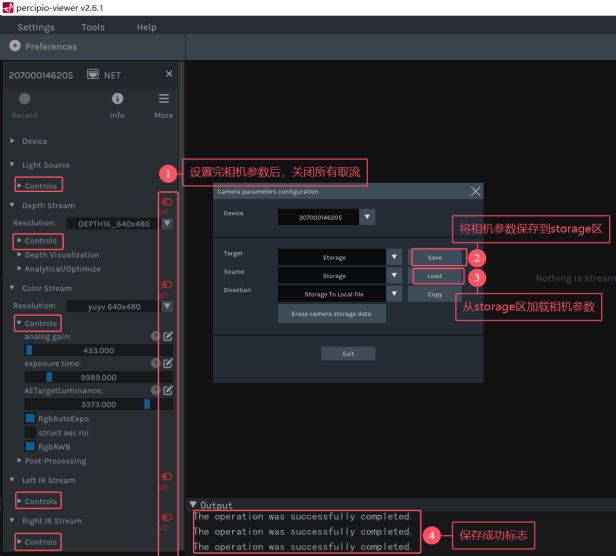
详细操作如下面链接所示: