Claude
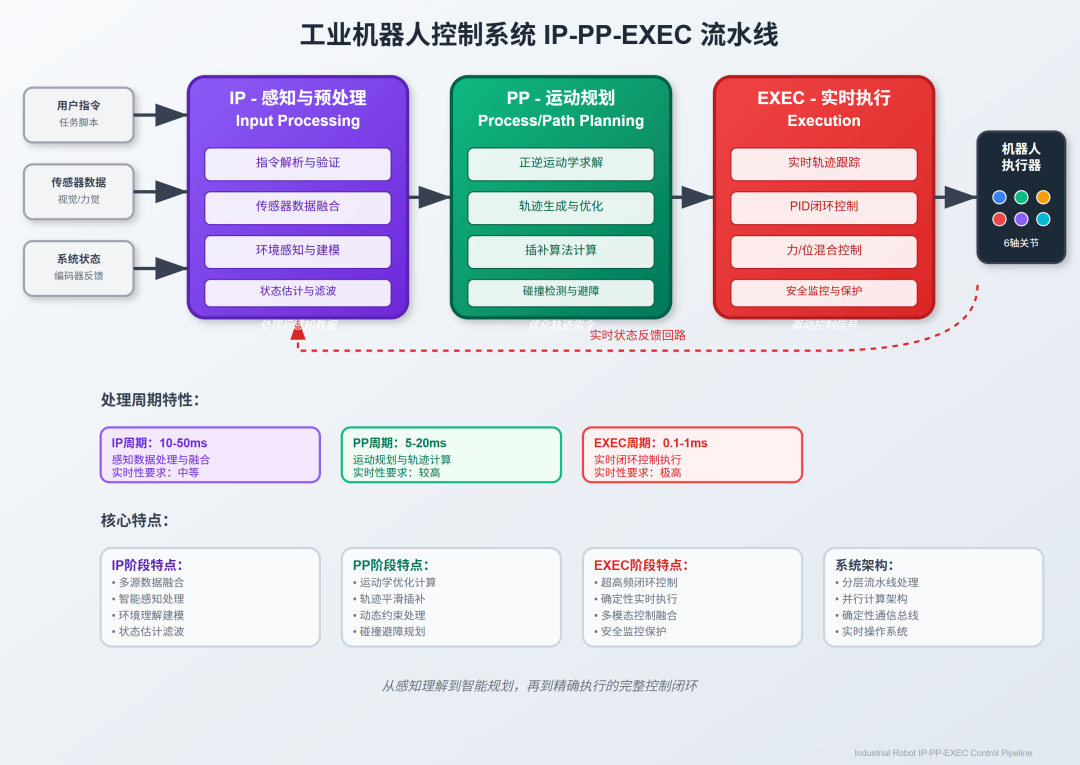
IP(Input Processing,感知与预处理)阶段是整个控制流水线的"眼睛和大脑前端"。想象一下人类在执行复杂任务时的思维过程,首先我们需要收集和理解周围的信息。这个阶段负责接收来自多个源头的原始数据,包括用户下达的高级任务指令、各种传感器(视觉、力觉、触觉)提供的环境信息,以及系统内部的状态反馈数据。
这个阶段的核心工作是将这些原始的、往往带有噪声和不确定性的数据转换为控制系统能够理解和使用的结构化信息。指令解析与验证功能确保用户输入的任务指令在语法和逻辑上都是正确的,就像人类在接收到指令后会先理解其含义一样。传感器数据融合则将来自不同传感器的信息进行整合,形成对环境的统一认知。环境感知与建模功能构建机器人周围世界的数字化表示,而状态估计与滤波则通过数学方法消除测量噪声,提供可靠的系统状态信息。
PP(Process/Path Planning,运动学、轨迹与插补规划)阶段是整个系统的"大脑计算中心"。这个阶段接收来自IP阶段处理后的清洁、结构化数据,然后进行深度的数学计算和优化。这就像人类在理解了任务和环境后,开始在大脑中规划具体的行动方案一样。
正逆运动学求解是这个阶段的基础工作,它解决了从任务空间到关节空间的转换问题。比如说,当机器人需要将末端执行器移动到某个特定位置时,系统必须计算出每个关节应该转动多少角度。轨迹生成与优化功能负责在起点和终点之间规划一条既安全又高效的路径,就像GPS导航系统为您规划最优路线一样。插补算法计算则将这条路径细分为无数个密集的中间点,确保运动的平滑性。碰撞检测与避障功能则像是一个虚拟的安全员,持续监控规划的路径是否会导致机器人与环境或自身发生碰撞。
EXEC(Execution,实时闭环执行)阶段是整个系统的"肌肉和神经末梢"。这个阶段的任务是将PP阶段计算出的理想轨迹转换为实际的机器人运动。这个过程需要极高的实时性,就像人类的反射弧一样,必须在毫秒级的时间内做出响应。
实时轨迹跟踪功能负责确保机器人严格按照规划的路径运动,而PID闭环控制则是实现精确控制的核心算法。PID控制器就像一个非常敏感的舵手,它持续比较期望位置与实际位置的差异,并生成相应的修正信号。力/位混合控制功能使机器人能够在接触作业中既控制位置又控制力度,这对于装配、打磨等任务至关重要。安全监控与保护功能则像是一个永不疲倦的安全员,时刻监控系统状态,在检测到异常时立即采取保护措施。
这种架构设计的智慧在于它将复杂的机器人控制问题分解为三个相对独立但又紧密协作的子问题。每个阶段都有其专门的职责和最适合的处理频率。IP阶段以中等频率处理感知数据,为后续计算提供可靠的信息基础。PP阶段以较高频率进行运动规划,确保机器人能够快速响应环境变化。EXEC阶段则以极高频率执行控制算法,保证运动的精确性和稳定性。
特别值得注意的是系统中的实时状态反馈回路。这个反馈机制确保了整个控制系统能够基于实际执行结果不断调整和优化其行为。当执行器的实际状态与预期发生偏差时,这个信息会被快速反馈到各个阶段,触发相应的调整和修正。这种闭环设计是现代智能机器人系统区别于传统开环控制系统的关键特征。
整个流水线架构体现了现代机器人控制系统向智能化、自适应化发展的趋势。它不仅能够执行预定的任务,更重要的是能够感知环境变化、理解任务需求、自主规划行动,并在执行过程中持续优化性能。这种设计哲学为机器人在复杂、动态环境中的应用奠定了坚实的技术基础。
ChatGPT
下面给出工业机器人控制系统中常见的 IP--PP--EXEC 三段流水线的架构与各阶段职责梳理,以及它们之间的数据流动关系:
一、总体架构概览
css
┌───────────┐ ┌──────────────┐ ┌───────────┐│ IP 阶段 │──▶ │ PP 阶段 │──▶ │ EXEC 阶段 ││(Input Proc)│ │(Path Planning)│ │(Execution)│└───────────┘ └──────────────┘ └───────────┘ ▲ │ │ ▼ └────────────── 反馈/状态 ──────────────┘-
IP(Input Processing):感知与预处理
-
PP(Process/Path Planning):运动学、轨迹与插补规划
-
EXEC(Execution):实时闭环执行
各阶段通过双缓冲或消息队列并行工作,形成流水线式的循环调度,以提高系统吞吐量并满足实时性要求。
二、各阶段职责
| 阶段 | 主要功能 | 核心模块 | 输入 | 输出 |
|---|---|---|---|---|
| IP | 传感器采集、状态估计、滤波和坐标转换 | 传感器驱动、滤波器、状态机 | 各种传感器原始数据(编码器、力/扭矩、视觉、PLC信号等) | 实时机器人关节/笛卡尔位姿、外部环境状态 |
| PP | 轨迹生成、运动学求解、插补 | 逆/正运动学、轨迹规划器(五次多项式、样条等)、插补算法 | IP 输出的实时状态 + 上层任务命令(轨迹点、路径) | 插补点序列(期望位置、速度、加速度、时间戳) |
| EXEC | 伺服控制、力控、碰撞监测、执行器驱动 | PID/PI 控制器、模型预测、力/扭矩闭环、急停保护 | PP 输出的插补点序列 | PWM/电流指令,各关节驱动量 |
三、流水线调度示例
- 周期触发
-
系统以固定控制周期 Tc(如 1 ms、4 ms)启动一轮流水线。
-
各阶段采用双缓冲(Ping--Pong)或环形队列,确保各阶段可并行执行且互不干扰。
-
数据流动
-
-
在周期 k:
IP 阶段读取第 kkk 轮的传感器数据,输出状态 Buffer A;
PP 阶段读取上周期(k−1)的 Buffer A 及上层轨迹要求,生成插补 Buffer B;
EXEC 阶段读取更上周期(k−2)的插补 Buffer B,计算并下发伺服驱动命令。
-
-
延时管理
-
- 整体滞后约等于"流水线级数 × 周期时钟",但由于并行执行,各阶段只需在一个周期内完成自身计算。
四、IP 阶段详解
-
传感器接口
-
- 编码器、加速度计、力/扭矩传感器、视觉/机械手工具中心 TCP 传感器等。
-
预处理
-
- 低通滤波(Butterworth、Kalman)、去噪、标定补偿。
-
状态估计
-
- 基于机器人模型的卡尔曼滤波或扩展卡尔曼滤波(EKF)融合多传感器。
-
输出
-
- 当前关节角度、笛卡尔位姿、外部载荷估计。
五、PP 阶段详解
-
运动学求解
-
-
正运动学:关节→笛卡尔
-
逆运动学:笛卡尔→关节
-
-
轨迹生成
-
-
插值方式:直线插补(L)、圆弧插补(C)、样条插补(S)、螺旋插补等;
-
时间参数化:三次或五次多项式,确保末端速度/加速度连续。
-
-
碰撞与约束检测
-
-
与障碍物和机械极限的碰撞检测;
-
关节速度、加速度、力矩极限检查。
-
六、EXEC 阶段详解
-
伺服驱动
-
-
基于内环电流环、速度环和/或位置环的 PID/PI 控制;
-
可增加前馈矩阵补偿重力、摩擦、离心力。
-
-
力/扭矩闭环
-
-
如果需要力控,则在 TCP 施加外力时动态调整目标轨迹;
-
实现顺应控制、人机协作安全。
-
-
安全保护
-
- 急停输入、软/硬限位、碰撞检测(异常力矩上升)。
-
执行器输出
-
- PWM 波形、电流指令或总线消息(EtherCAT、Profinet)下发到伺服驱动器。
七、典型伪代码示例
✅ 模块职责说明(简化类接口)
cs// 数据结构struct SensorData { double joint_pos[6], joint_vel[6]; /*...*/ };struct RobotState { SE3 pose; Vector6d velocity; /*...*/ };struct TrajectoryPoint { double time; Vector6d q, dq, ddq; SE3 T; Vector6d V; /*...*/ };struct ServoCommand { double pwm[6]; }; // IP 模块class InputProcessor {public: SensorData readSensors(); // 读取原始传感器数据 RobotState estimateState(const SensorData&); // 状态估计/滤波}; // PP 模块class Planner {public: void setTarget(const PoseCommand& target); // 外部输入目标设置 TrajectoryPoint interpolate(const RobotState& state, double t); // 插补计算}; // EXEC 模块class Executor {public: ServoCommand computeCommand(const TrajectoryPoint& traj); // 伺服控制计算 void sendToActuators(const ServoCommand& cmd); // 下发执行命令}; // Watchdog、安全模块、急停处理等也可封装为类🔁 主控制循环伪代码(IP → PP → EXEC 流水线)
cppconst double CONTROL_CYCLE = 0.004; // 4ms 控制周期 // 实例化各模块InputProcessor ip;Planner planner;Executor exec; // 环形缓冲区用于流水线并行:N个周期延迟std::deque<RobotState> stateBuffer;std::deque<TrajectoryPoint> trajBuffer; void MainControlLoop() { double time_now = 0.0; while (!shutdownRequested()) { auto cycle_start = now(); // === IP 阶段 === SensorData sensors = ip.readSensors(); RobotState current_state = ip.estimateState(sensors); stateBuffer.push_back(current_state); if (stateBuffer.size() > 3) stateBuffer.pop_front(); // 控制滞后窗口 // === PP 阶段 === if (stateBuffer.size() >= 2) { RobotState planning_state = stateBuffer[stateBuffer.size() - 2]; TrajectoryPoint planned_traj = planner.interpolate(planning_state, time_now); trajBuffer.push_back(planned_traj); if (trajBuffer.size() > 2) trajBuffer.pop_front(); } // === EXEC 阶段 === if (trajBuffer.size() >= 2) { TrajectoryPoint exec_traj = trajBuffer[0]; ServoCommand cmd = exec.computeCommand(exec_traj); exec.sendToActuators(cmd); } // === 时间同步 === time_now += CONTROL_CYCLE; waitUntil(cycle_start + CONTROL_CYCLE); // 控制周期对齐 }}可选模块扩展建议
-
软/硬急停机制(在主循环中插入条件判断)
-
状态机调度(如机器人状态 RUNNING、STOPPED、HOMING)
-
事件总线机制(将任务命令、状态变更异步传入主循环)
-
异步日志与监控接口
-
ROS2 框架集成(通过 callback + timer 实现)
✅ 一、每阶段子模块的独立测试模板(C++风格)
我们将 IP / PP / EXEC 拆为独立模块,分别构造单元测试或模块级验证函数。
- IP 阶段测试:传感器→状态估计
cppvoid TestInputProcessor() { InputProcessor ip; // 模拟传感器数据 SensorData fakeSensor; for (int i = 0; i < 6; ++i) { fakeSensor.joint_pos[i] = sin(i * 0.1); fakeSensor.joint_vel[i] = cos(i * 0.1); } // 状态估计 RobotState state = ip.estimateState(fakeSensor); // 打印验证 std::cout << "Estimated pose: " << state.pose.matrix() << std::endl; std::cout << "Estimated velocity: " << state.velocity.transpose() << std::endl;}- PP 阶段测试:状态→轨迹点生成
phpvoid TestPlanner() { Planner planner; RobotState input_state; input_state.pose = SE3::Identity(); input_state.velocity = Vector6d::Zero(); planner.setTarget(PoseCommand{/* 目标笛卡尔姿态/速度等 */}); TrajectoryPoint point = planner.interpolate(input_state, 0.1); std::cout << "Trajectory joint position: " << point.q.transpose() << std::endl; std::cout << "Trajectory SE3: " << point.T.matrix() << std::endl;}3. EXEC 阶段测试:轨迹点→控制输出
phpvoid TestExecutor() { Executor executor; TrajectoryPoint traj; traj.q = Vector6d::LinSpaced(6, 0.0, 1.0); traj.dq = Vector6d::Constant(0.5); traj.ddq = Vector6d::Zero(); ServoCommand cmd = executor.computeCommand(traj); executor.sendToActuators(cmd); std::cout << "PWM Commands: "; for (double p : cmd.pwm) std::cout << p << " "; std::cout << std::endl;}📈 二、Mermaid 缓冲调度图(IP → PP → EXEC)
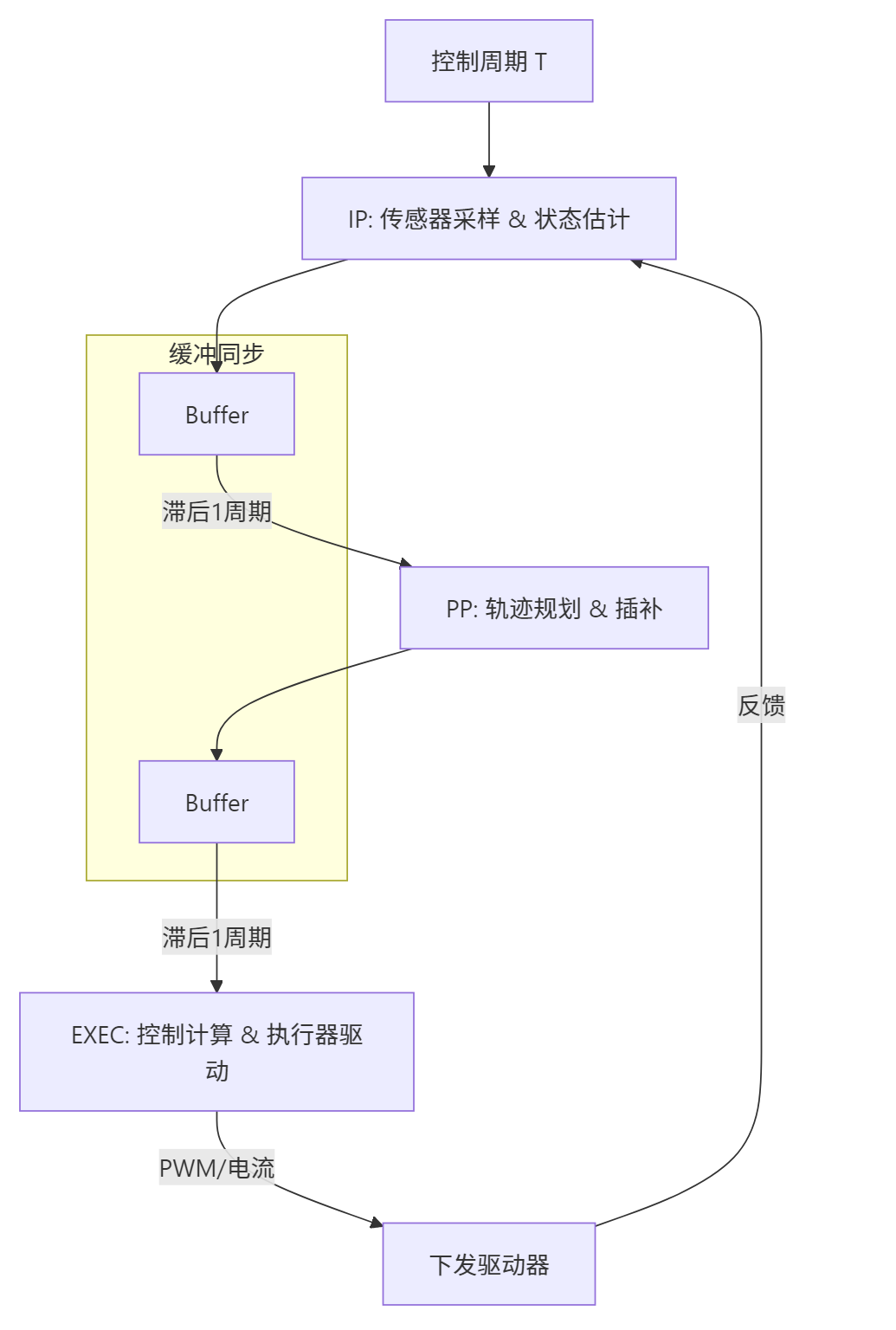
说明:
-
每阶段读取上一阶段滞后一周期的数据;
-
可通过双缓冲或
deque实现安全数据读写; -
控制时延最小为 2 个周期。
⏱️ 三、实时调度分析(Xenomai / RT_PREEMPT)
✅ RT 关键参数(工业机器人控制)
项目 建议值 说明 控制周期 1ms / 2ms / 4ms 根据机器人动态特性和CPU能力选取 用户态调度延迟(worst case) < 100μs RT_PREEMPT 能满足 实时线程优先级 SCHED_FIFO80~99EXEC线程 > PP > IP 堆栈大小 16KB~64KB 控制线程避免堆上分配 锁抢占 避免长时间持有锁 否则触发调度抖动 ✅ Xenomai 模式部署参考
apache# 控制线程优先级配置示例(使用 Xenomai)rt_task_create(&control_task, "main_loop", 0, 99, T_JOINABLE);rt_task_start(&control_task, &MainLoop, nullptr);✅ 控制周期 jitter 监控建议
-
使用
clock_nanosleep+CLOCK_MONOTONIC精确定时; -
对比理想周期与
now()差值,记录 jitter 曲线; -
配合 Linux perf 或
cyclictest分析调度延迟。
✅ 示例 jitter 日志输出
sql[EXEC] cycle=2456, jitter=+23 us[EXEC] cycle=2457, jitter=--10 us[EXEC] cycle=2458, jitter=+15 us...如你需要我进一步提供:
-
cyclictest测试脚本与 log 分析; -
RTAI / PREEMPT_RT / Xenomai3对比; -
实时线程绑定
isolcpu, NUMA 内存优化策略; -
控制 jitter 实时绘图代码;
我可以继续补充。是否继续?