在农业巡查、环保监测、安防布控等广阔天地,无人机(UAV)早已超越了"拍照打卡"的酷炫标签,成为不可或缺的智能之眼。然而,当计算机视觉模型从地面"抬头"望向无人机视角时,迎接它的却是截然不同的挑战:目标更小、分布更密集、背景变化更复杂。
地面视角的数据集虽已汗牛充栋,但专为"上帝视角"量身定制的优质数据集,才是攻克这些难题的关键。今天,我们隆重介绍一个在无人机视觉领域经典且实用的标杆数据集------VisDrone-DET数据集。
无人机视觉崛起,呼唤专属"弹药库"
随着配备高清摄像头的无人机在智慧农业、航拍摄影、快速物流、智慧安防等领域的广泛应用,自动化理解无人机采集的海量视觉数据变得至关重要。无人机视觉,也因此成为计算机视觉研究的前沿热点与难点。
VisDrone应运而生,专为天空战场打造!
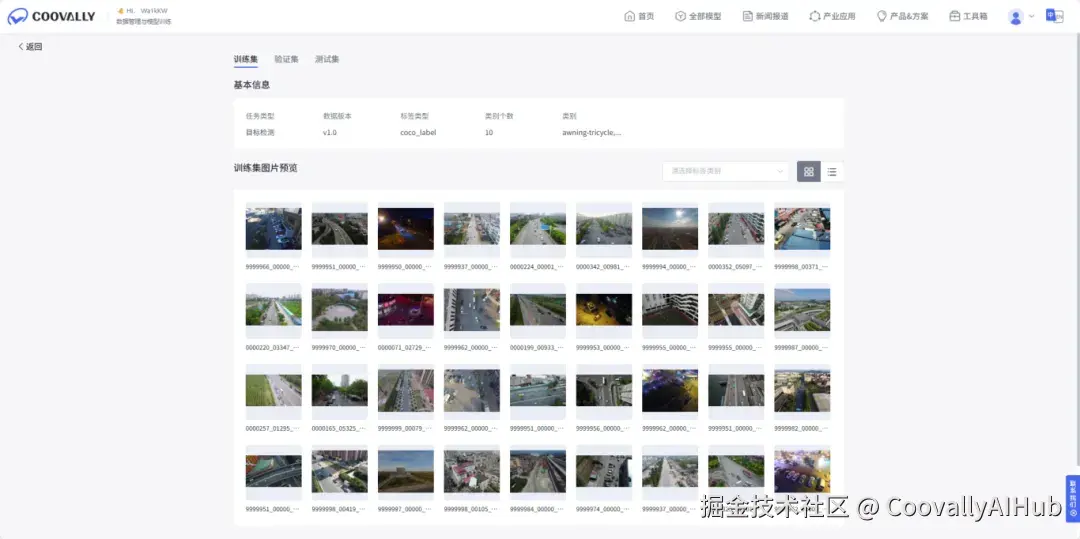
VisDrone数据集,由天津大学机器学习与数据挖掘实验室AISKYEYE团队精心收集并发布。它专为解决无人机视角下的视觉任务而生:
视角真实: 所有数据均由不同型号无人机搭载的摄像头实际捕获,高度还原真实应用场景的复杂性。
- 覆盖广泛:
- 地理跨度: 采集自中国14个不同城市,相距数千公里,地域差异显著。
- 环境多样: 涵盖城市高楼林立与乡村开阔田野等多种环境。
- 条件多变: 包含晴天、阴天以及不同光照条件下的场景。
- 目标丰富: 聚焦行人、车辆(汽车)、自行车、三轮车等典型目标。
- 密度挑战: 同时包含稀疏目标场景和极度拥挤的场景。
- 规模庞大,标注精细:
包含10,209张高质量静态图像。
包含288个视频片段(总计261,908帧)。
超过260万个目标被精细标注(边界框)!
更提供场景可见性、目标类别、遮挡程度等关键属性信息,极大提升数据的科研与应用价值。

VisDrone的核心价值:直面真实挑战
VisDrone绝非简单的图片集合。它精准捕捉了无人机视觉应用中的核心痛点:
- 微小目标检测难: 高空视角下,行人、车辆等目标像素占比大幅缩小。
- 密集场景易漏检误检: 交通枢纽、集市等人车密集区域,目标重叠、遮挡严重。
- 复杂背景干扰大: 城市建筑群、乡村自然景观变化多端,干扰模型判断。
- 光照天气变化适应难: 不同时段、不同天气下的成像效果差异显著。
这些由真实世界带来的挑战,使得VisDrone成为训练和评估目标检测、多目标跟踪等算法性能的黄金标准与试金石。
- 开箱即用,助力研究与应用
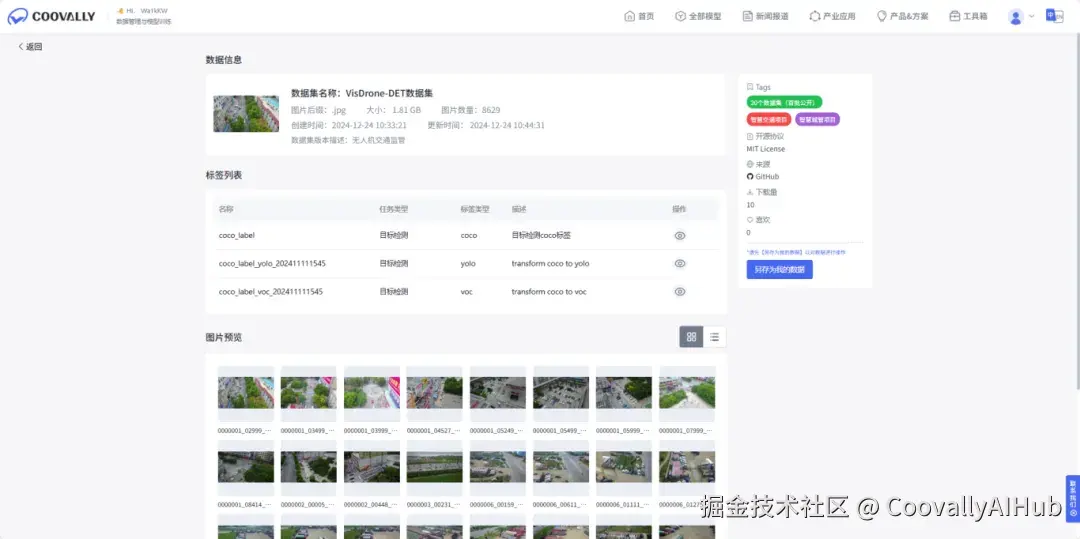
VisDrone数据集现已在Coovally平台上整理就绪!
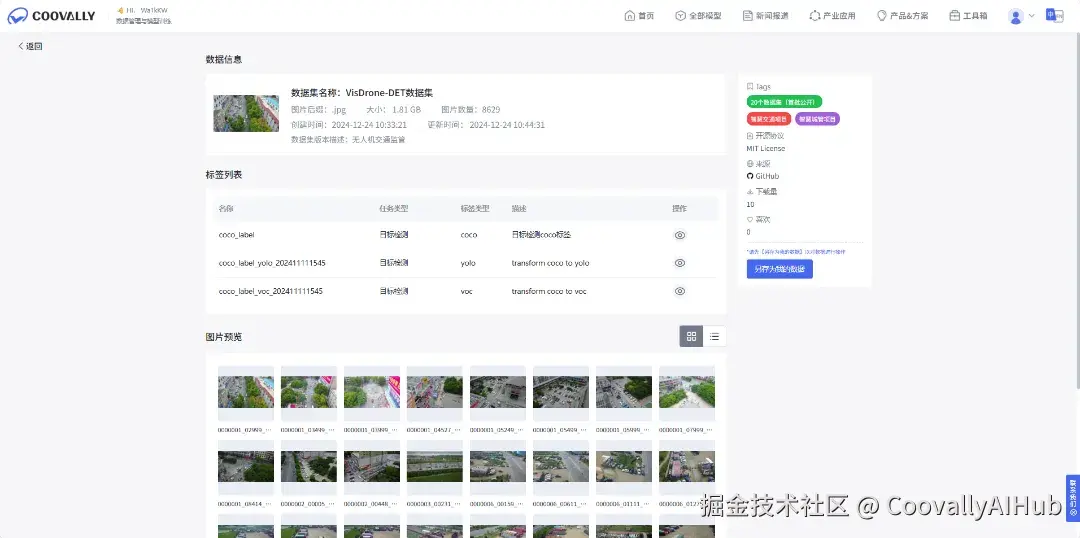
- 格式兼容: 标签格式已完美兼容YOLO等主流检测框架,开箱即用,省去繁琐转换。
- 一键调用: 在Coovally平台,您可以轻松获取这份宝贵的资源。
平台链接: ****www.coovally.com
结论:连接理论与实践的空中桥梁
VisDrone不仅是一个大规模、高质量、场景丰富的无人机视觉数据集,更是架设在计算机视觉前沿研究与真实世界复杂应用之间的一座重要桥梁。
如果你正在寻找一个能真实反映无人机视角下目标检测与跟踪挑战的数据集,或是希望验证算法在复杂多变环境下的鲁棒性,VisDrone无疑是您深入探索和实践的优选!
后续我们将持续分享更多优质数据集、前沿开源项目及实战训练心得。关注我们,一起探索无人机视觉的无限可能!
让视觉与飞行深度交融,开启智能感知新高度!