前言
BSW层是整个AUTOSAR架构的重点,本文主要对AutoSar BSW相关知识进行了汇总,仅作为自学使用,以方便后续查漏补缺。
基础软件(BSW)
BSW层是整个AUTOSAR架构的重点。
BSW分层
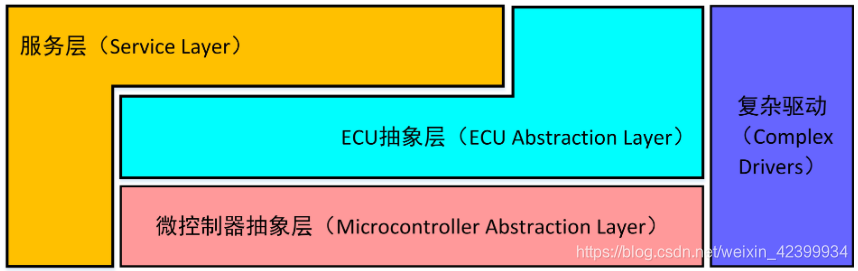
服务层(Service Layer)
- 为ASW(通过RTE)、BSW其他模块提供抽象服务,如:操作系统、任务调度、诊断服务、网络管理、存储器服务、总线通信管理服务等。
- AUTOSAR运行模块间的"水平"交互
ECU抽象层(ECUAL,ECU Abstraction Layer)
- 底层驱动的抽象,同时它也是外设的驱动,它提供了可以访问外设和底层MCU的API接口
- 对控制器的基础功能和接口进行统一,如:CAN报文内容的解析、网关报文的转发、存储器读写流程的控制。
- 与整个硬件(PCB)有关。使上层软件可以独立于硬件
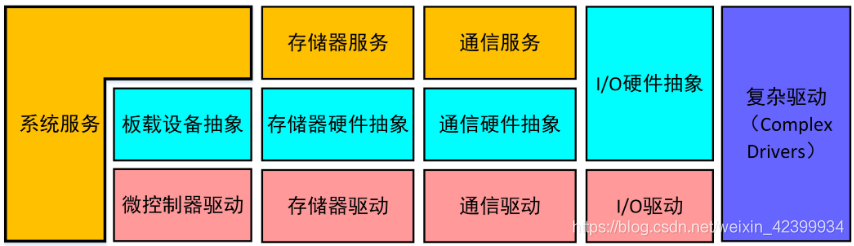
微控制器抽象层(MCAL)
- 结构上:位于BSW的底层。
- 包含与MCU硬件直接相关的驱动软件,如:对存储器、寄存器、IO的操作。
- 封装了MCU硬件的特定特性,这种封装为ECU抽象层提供了一个AUTOSAR定义的接口,使其独立于MCU硬件。从而提供与硬件无关的接口,使上层软件ASW不依赖于具体的硬件。
- AUTOSAR MCAL规范,包括:
- 功能概述
定义模块实现的具体功能,如定义mcu驱动程序提供基本控制器初始化、时钟初始化、电源管理模式等特定功能。 - 依赖关系
定义模块间的依赖关系 - 功能规范
定义包括复位、时钟管理等一般功能规范。还定义错误分类、错误检测等功能规范。 - API规范
定义模块包含的数据类型、模块内部的类型定义、函数定义等 - 功能时序图
定义用户代码与驱动模块完成特定功能的时序 - 配置规范
定义了提供给用户进行初始化及驱动能力配置选项的规范说明。
- 功能概述
- MCAL 核心作用
- 硬件抽象
将MCU的硬件特性(如寄存器配置、外设操作等)封装成标准化的API,使上层软件无需关心具体的硬件型号 - 统一接口
提供跨平台的驱动程序接口(如GPIO、CAN通信),确保应用代码可移植到不同MCU。 - 降低开发成本
避免针对不同平台芯片重复开发驱动代码,加速ECU软件开发流程。
- 硬件抽象
- MCAL模块
- MicroController Drivers
- 作用:配置MCU的核心功能,如时钟、电源模式、中断控制器(如NVIC)。
- GPT Driver(通用定时器)
- WDG Driver(WatchDog)
- MCU Driver(Micro Controller Unit)
- 作用:配置MCU的核心功能,如时钟、电源模式、中断控制器(如NVIC)。
- Memory Drivers
- FLS Driver(Flash)
- EEPROM
- RAM
- FLS Driver(Flash)
- I/O Drivers
- Port
- Dio
- ADC
- PWM
- Icu(Input Capture Unit输入捕获单元)
- Ocu
- Communication Drivers
- Spi
- LIN
- CAN
- FlexRay
- ETH
- Uart
- Complex Drivers
- 作用:处理非标准外设或高实时性需求。如直接控制传感器、执行器,包括:
- 电机控制
- 高精度定时器
- MicroController Drivers
- MCAL代码
- 静态代码
MCAL的核心代码,提供符合软件规范以及微控制器硬件规范的底层驱动程序,支持访问微控制器的片内外设。如TC3x,MCAL BASIC部分驱动静态代码,每个模块都包含.c/h文件,不需要用户修改。 - 动态代码
通过工具生成的代码,代码生成工具需要导入PDF(Parameter Definition File)文件,通常为.arxml或.xdm为后缀,其定义了配置参数的描述及其最小/大值。- 一般使用的配置工具是EB,它导入PDF后能够提供图形界面进行相关配置,然后最终生成动态代码。
- 生成的动态代码,包括2部分:
- 一部分是与静态代码配合完成底层驱动工作,大部分名称格式为*_Cfg.c/h或*_PBCfg.c/h。
- 另一部分,EB生成以.xdm为后缀的配置文档,保存了当前的配置信息。还生成了以.arxml为后缀的ECU描述文件。
- 静态代码
- MCAL开发
- 使用EB开发MCAL总结参考:MCAL开发 & EB使用总结
复杂设备驱动(CDD)
- 在AUTOSAR架构中具有独特的特性。为直接访问非标准控制器硬件提供了一种标准化的机制,并提供了ASW通过RTE访问的AUTOSAR接口。
- 跨越于微控制器硬件层和RTE之间,其主要任务是整合具有特殊目的且不能用MCAL进行配置的非标准功能模块,将该部分功能嵌入到AUTOSAR基础软件层中,从而实现处理复杂传感器以及执行器的特定功能和时间要求。
- 为用户提供可以自行编写特殊设备驱动软件的可能性。
- 提供复杂传感器和执行器的驱动
- 重要的应用模块可以直接访问硬件资源。如:胎压监测、喷油量控制
MCU硬件(Microcontroller Hardware)
- 位于微控制器"内部"的设备,如:内部EEPROM、CAN控制器
- 微控制器外部通过SPI连接的硬件芯片
BSW功能
IO功能
- 包括:DIO、ADC、PWM等。示例:

Communication功能
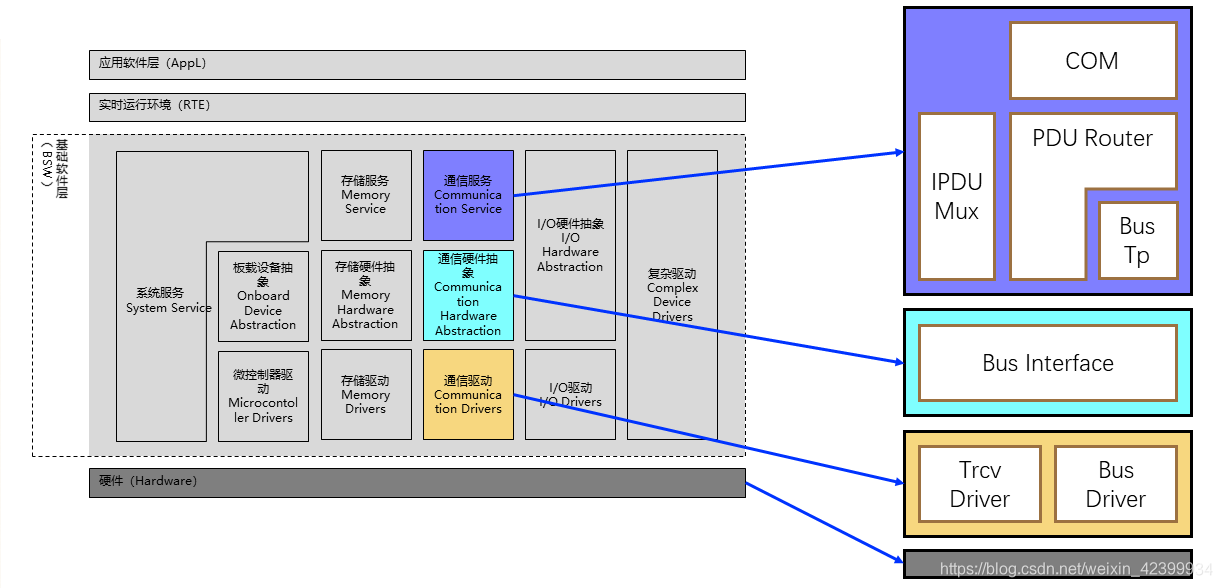
- AUTOSAR COM模块
- 上层模块:RTE
- 下层模块:PDU Router
- 用于处理不同通信协议之间的数据路由和转换。
- PDU Router 的核心功能是将来自不同通信总线(如 CAN、LIN、FlexRay、以太网等)的消息进行路由、转换和分发,以确保不同网络节点之间的数据能够正确传输和处理。
Memory功能
- NVM(NVRAM Manger):应用层访问非易失性数据的唯一接口,提供非易失性数据的管理服务
- 上层:RTE
- 下层:Flash / EEPROM Driver接口
BSW的模式管理
BSW的看门狗实现
BSW的诊断系统实现
BSW的操作系统实现
OS服务
可以把AUTOSAR的OS服务理解为FreeRTOS。
- OS Application
- 一系列对象的集合:Tasks、ISRs、Alarms、Counters
- 每个核有1~N个 OS Applications
- OS Applications内通信使用RTE
- OS Applications之间通信使用IOC
- ECU间通信使用Com
- task
BSWM
- 对通讯进行控制
- ECU状态处理
- 初始化设置
ECUC
- 初始化
- 对Hardware的一些设置
- PDUR
通信流程/链路
- 框图
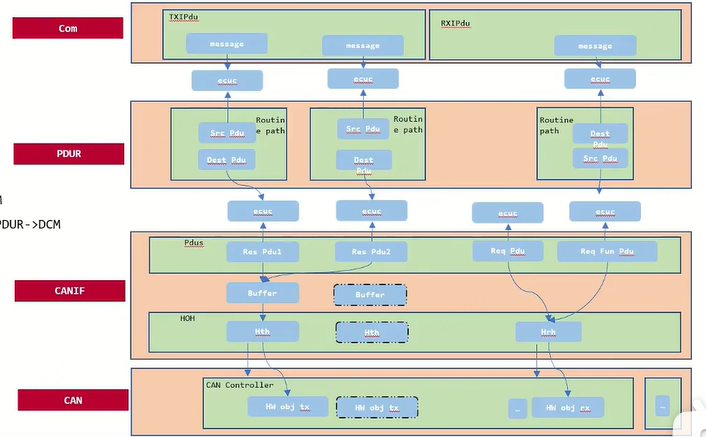
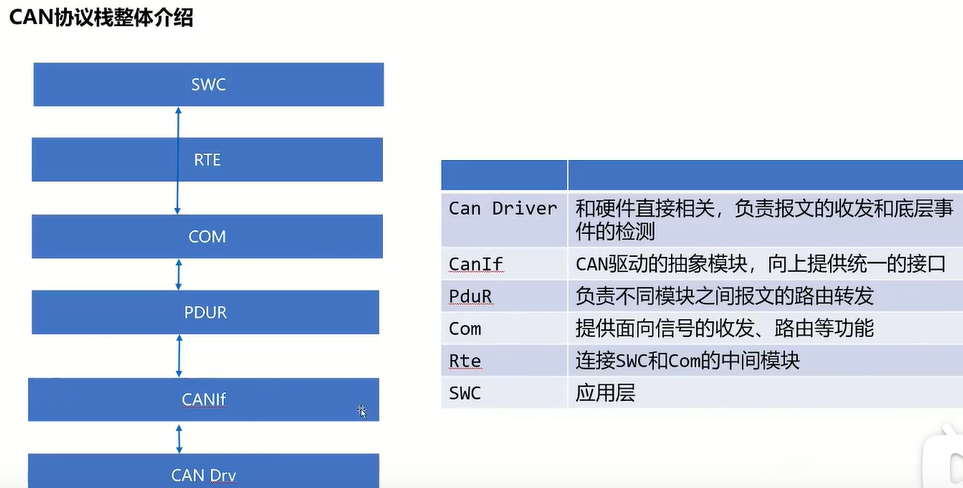
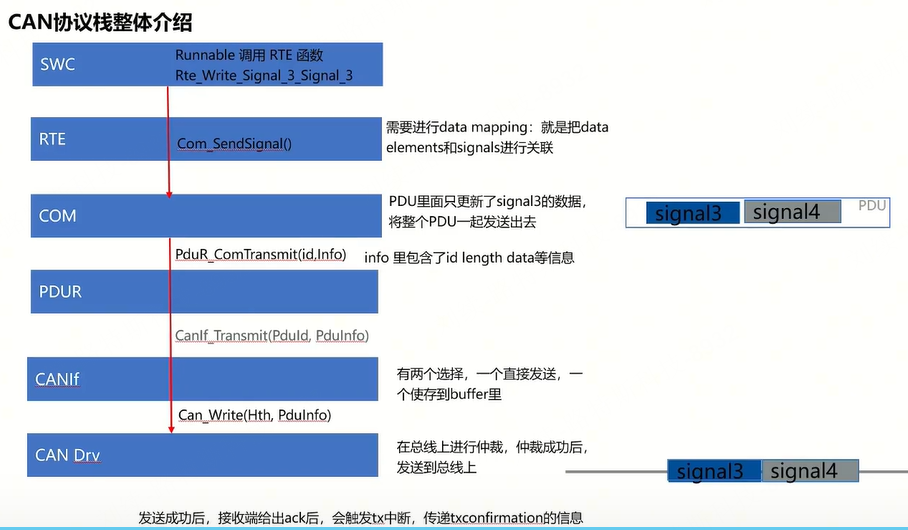
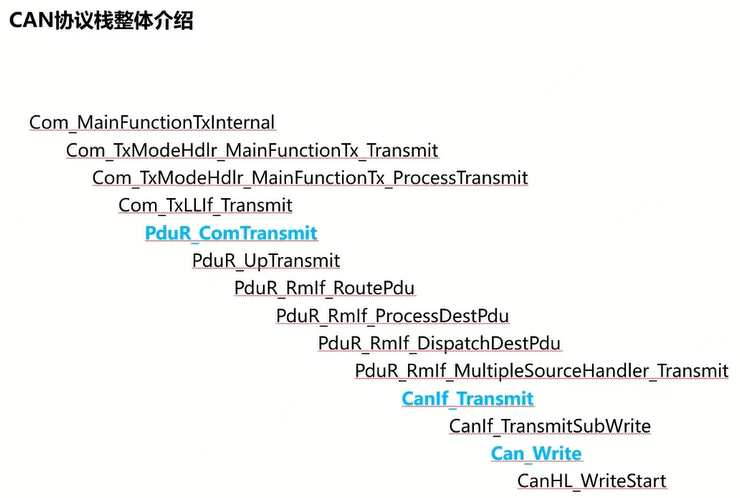
- CAN协议栈
- CAN数据的收发属性,都是直接在工具上配置的。描述:
- CAN数据的收发属性,都是直接在工具上配置的。描述:
- CANIF 模块
- CAN驱动的抽象模块,向上提供统一的接口。
- 隔离对CAN硬件的操作。
- PDUs
- PDU(Protocol Data Unit) 通信协议中的数据单元
在汽车电子中,PDU 可以是从 CAN 总线、LIN 总线、以太网等不同协议中提取的消息。 - HOH
- PDU(Protocol Data Unit) 通信协议中的数据单元
- PDuR 模块
- 联系上层和下层,不对数据处理,只进行转发。
- 可以起到网关的作用。
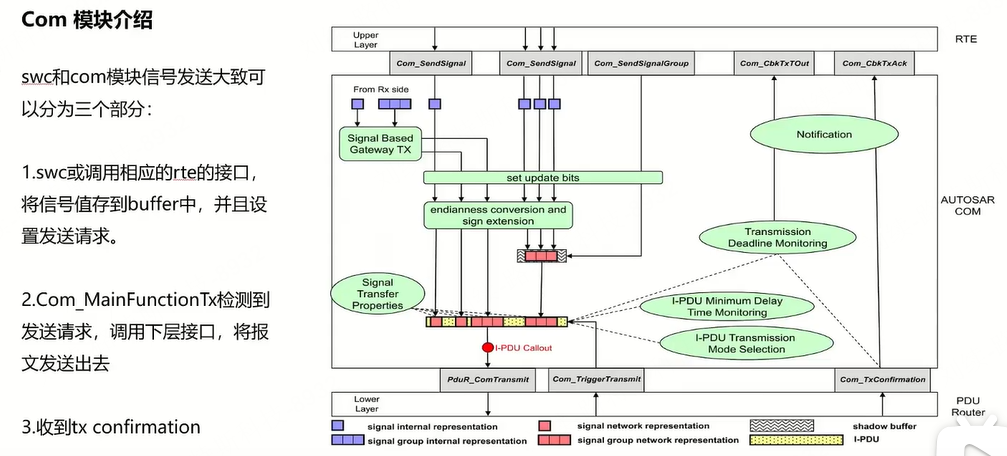
- COM模块
- Tx filter
- Rx filter
- Update Bit (UB位)
- 增加一个标志位,表示该数据是否有更新。
- 示例,如:节点A和节点B之间通信时,在同一个message中有data1和data2,但是A只想把data1发送给B,这时只需要把data1的UB置位,data2的UB不置位
- Signal Group
- Gateway