【导读】
本文针对扩散模型训练慢、高分辨率生成效率低的瓶颈,提出DC-AE 1.5框架。该框架核心在于引入结构化隐空间以提升高分辨率生成效率,并采用增强扩散训练技术加速模型收敛。实验表明,在ImageNet等数据集上,DC-AE 1.5在保持高生成质量的同时,实现了更快的训练吞吐率和更优的图像质量,取得了双重突破。
自适应路径规划(又称信息化路径规划)旨在规划能最大化任务相关信息获取、同时满足电池续航等资源约束的轨迹。其通过实时数据响应机制,依据新获取信息动态调整飞行路径。该技术已应用于海洋地形异常检测、农田杂草识别及多分辨率语义分割等领域。
本文旨在开发一种自适应路径规划器,其检测性能与低空覆盖规划器相当,但能更快发现农田目标物。该方法沿高空覆盖路径飞行,并依据检测确定性执行低空复核。相较于现有研究,本规划器直接利用目标检测网络的不确定性估计,具有更强的应用普适性。除田块边界外无需先验知识,并在真实数据与检测网络组合中验证性能,代码已开源。具体贡献包括:
(1)评估基于MCD的不同目标检测确定性估计方法;
(2)优化规划器的飞行高度与确定性阈值;
(3)分析无人机定位误差的影响;
(4)研究规划器对不同数量目标的搜索效率。

论文标题:
Adaptive path planning for efficient object search by UAVs in agricultural fields
论文 链接 :
材料与方法
采取了自适应路径规划器、检测不确定性估计方法、数据采集、检测网络训练流程、离线仿真环境、基线方法、性能指标以及实验设计。
结果与分析
- 实验1:检测确定性与错误率的关系
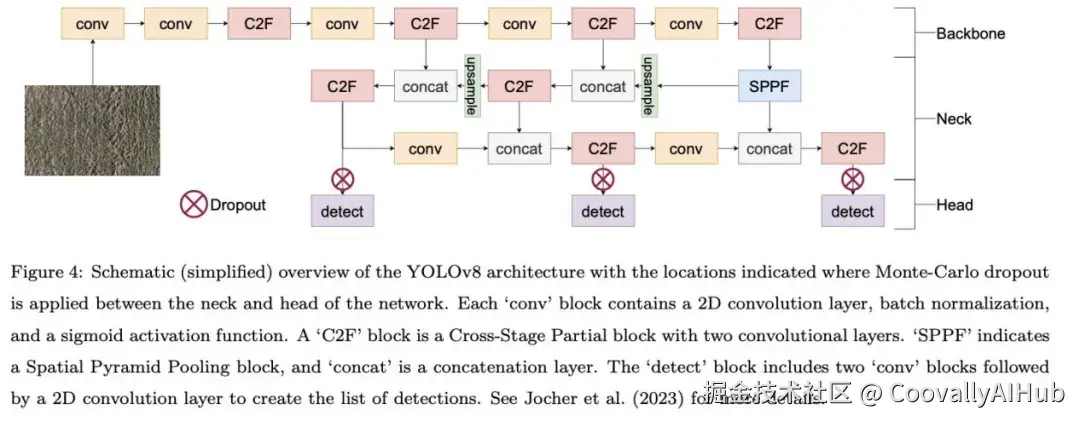
图8展示了不同高度下YOLOv8置信度与MCD确定性度量对真阳性(TP)和假阳性(FP)检测的区分效果。理想度量应使TP呈现高确定性、FP呈现低确定性。结果表明:
- YOLOv8置信度: 在12m高度能清晰区分TP与FP,但随高度增加,两者分布重叠加剧。
- MCD出现确定性: 多数情况下恒为1.0,无区分能力。
- MCD类别确定性: 12m高度时TP/FP分离明显。
- 定位确定性: 12m高度有效,但高海拔时重叠显著。
- 综合MCD确定性: 未优于默认YOLOv8置信度。
- 所有度量均显示: 高度增加会导致TP/FP确定性分布重叠增大,其中YOLOv8置信度在12m表现最佳。
- 实验2:参数优化
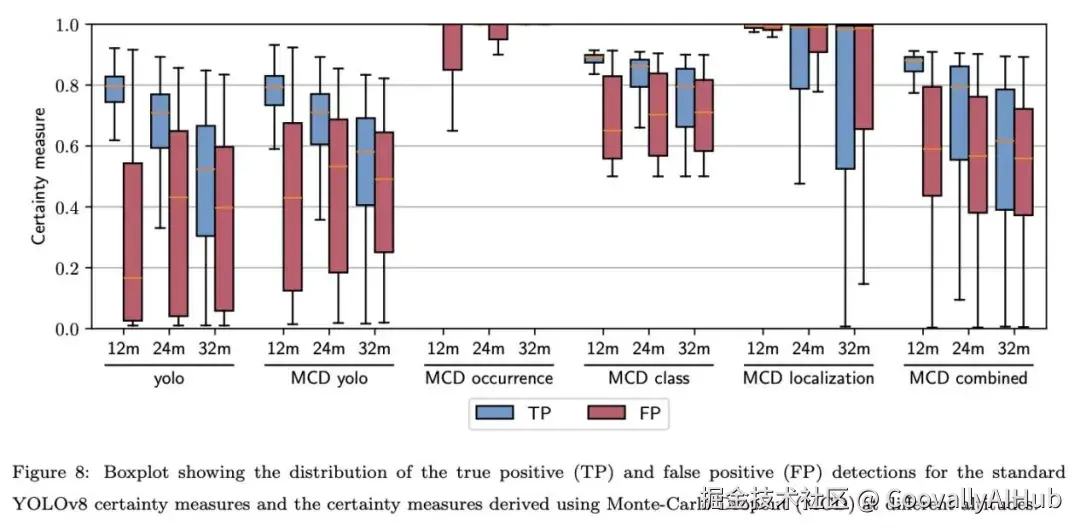
图9对比了覆盖高度(hcov)、接受阈值(caccept)和拒绝阈值(creject)对自适应规划器与覆盖规划器F1分数的影响:
- 覆盖规划器: F1分数随高度增加单调下降。
- 自适应规划器: 性能下降幅度更缓,但受creject影响显著------高拒绝阈值(如creject=0.4)会大幅降低F1分数,尤其在较高hcov时。
- 分布差异: 聚集分布的F1整体高于均匀分布,但参数趋势一致。
最优参数组合为hcov=24m、caccept=0.8、creject=0.2,此时在保持F1>0.8的同时,路径长度较12m覆盖路径缩短35%。
- 实验3:定位误差影响
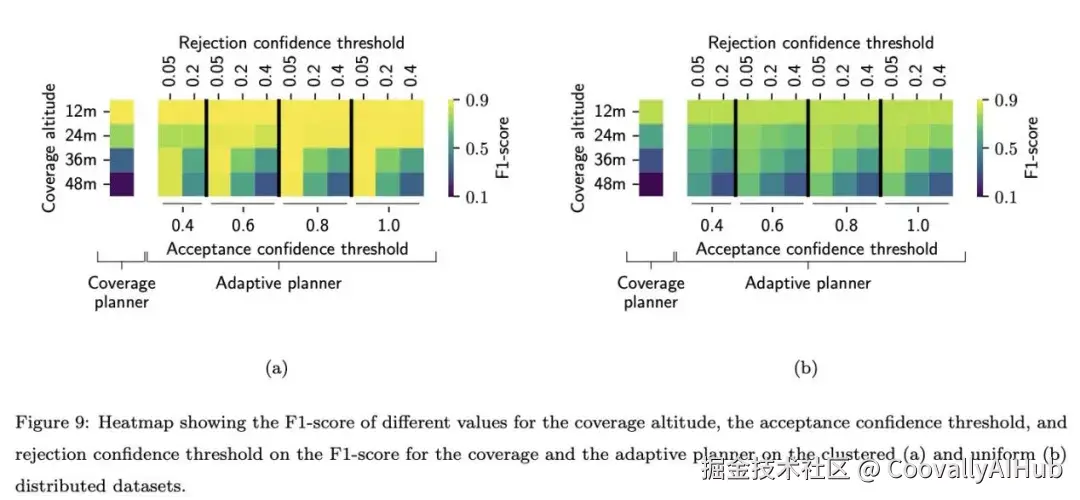
图12显示定位误差对两种规划器性能的影响(五级误差水平):
- 性能下降: 误差等级从"良好"降至"较差"(位置/高度误差>0.03m,姿态角误差>1°)时,F1分数骤降。
- 自适应优势: 在24m/36m/48m高度,因低空复核补偿定位误差,自适应规划器F1始终高于对应高度的覆盖路径。
- 误检原因: 高误差下同一目标未被正确融合,导致重复记录(FP增多)。
两种目标分布的F1下降趋势无显著差异。
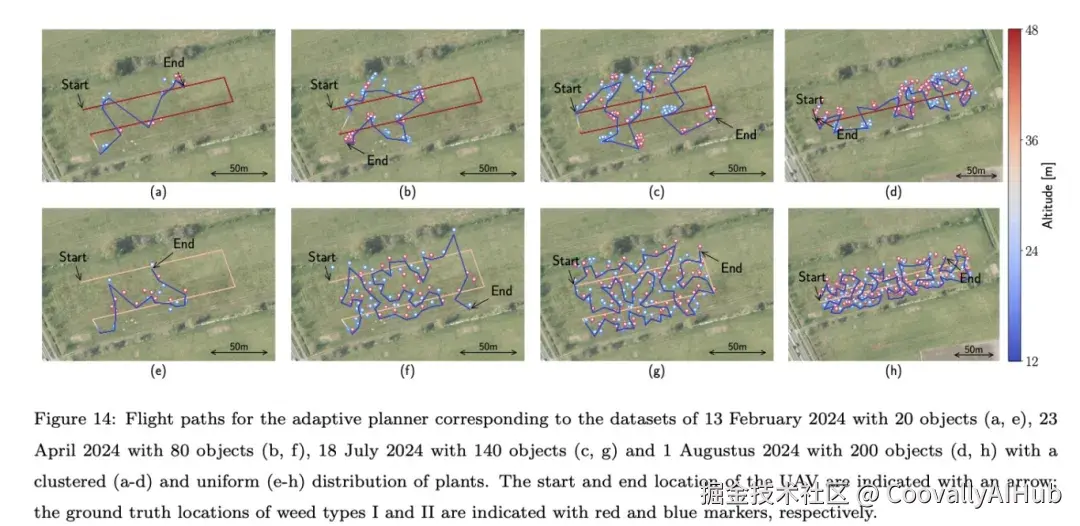
- 实验4:目标数量影响
图13-14揭示了目标数量与分布对路径效率的影响:
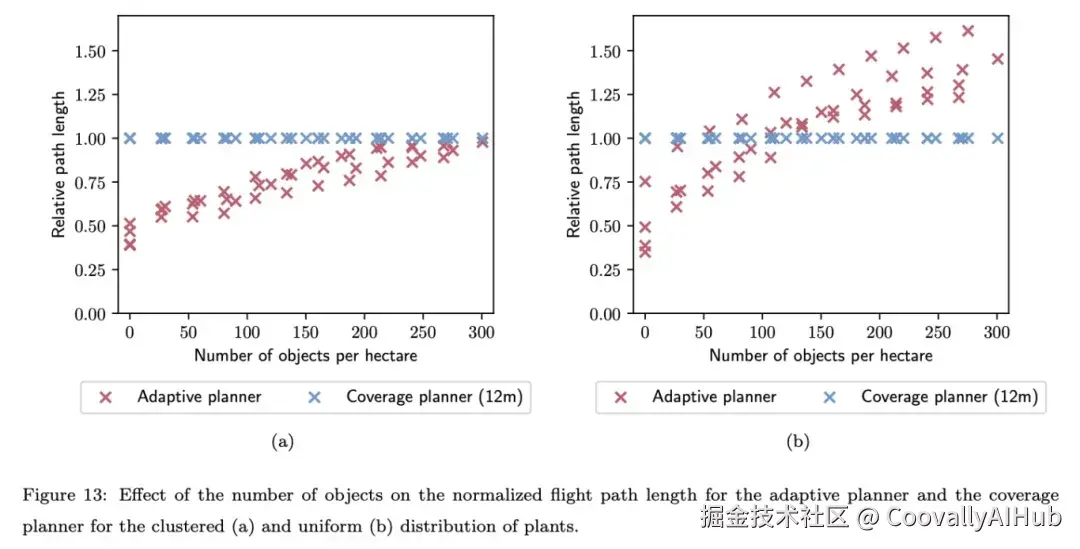
- 聚集分布: 自适应路径始终短于低空覆盖路径(直至250个目标/公顷时接近持平)。
- 均匀分布: 目标密度>80-120个/公顷时,自适应路径反更长------因需低空复核的目标过多,全覆盖反而更高效。
- 图14直观展示: 均匀分布下,自适应规划器需访问分散的航点,导致路径增长;而聚集分布能利用目标空间相关性优化航点。
讨论
- 与现有研究的对比
本研究结果表明,在目标呈聚集分布时,自适应路径规划器相比传统覆盖路径可缩短37%飞行距离,仅损失2%检测精度(F1分数)。这一性能表现优于van Essen等(2024)提出的学习型规划器(路径缩短74%但精度下降12%),与Popović等(2017)报道的"半时检测85%目标"结论具有可比性。关键差异在于:
- 效率-精度权衡: 通过调整覆盖高度(hcov)和置信阈值(caccept/creject)可实现不同平衡(实验2)
- **分布依赖性:**与文献结论一致,自适应规划器对均匀分布目标效率较低(>100个/公顷时覆盖路径更优)
- 从算法验证到高效落地:应对模型选型与训练的挑战
本研究成功验证了基于检测置信度的自适应路径规划策略的有效性,并优化了关键参数(如 hcov=24m, caccept=0.8, creject=0.2)。然而,无论是本文提出的规划器,还是对比研究中涉及的学习型规划器或覆盖路径规划器,其核心都依赖于高性能的目标检测模型(如本研究使用的YOLOv8)。在实际研发和应用落地过程中,研究人员和工程师常常面临一系列耗时且繁琐的工程挑战:
- 模型选型困难: 如何快速从众多主流和前沿模型(如YOLO系列、Faster R-CNN、DETR、DeepSort、Mask R-CNN等)中选择最适合特定任务(如农田小目标检测)的模型?
- 环境配置复杂: 为不同模型搭建、配置运行环境(框架、依赖库、硬件适配)耗费大量精力。
- 数据准备耗时: 搜集、整理、标注适配特定领域(如航拍农业图像)的高质量数据集过程漫长。
- 训练调优低效: 手动设置参数、监控训练过程、并行对比不同模型或配置、迭代优化模型性能(如提升mAP、降低Loss)通常需要数天甚至数周时间,且结果难以预测。
- 模型部署障碍: 将训练好的模型优化并导出为适合实际部署(如集成到无人机飞控系统)的格式(如 ONNX, TensorRT)存在技术门槛。
你愿意将宝贵的时间精力耗费在这些基础工程环节吗?
答案肯定是否定的,Coovally 正是为化解这些痛点而生的高效 AI 开发平台:
- 丰富的开源模型库:一键访问 YOLOv3/v4/v5/v7/v8、YOLO-NAS、Faster R-CNN、RetinaNet、DETR、DeepSort、Mask R-CNN 等主流和前沿模型,告别四处寻找、下载、配置环境的烦恼。想对比 YOLOv8 和 Mask R-CNN 在农田杂草检测上的效果?点几下鼠标即可开始。
- 内置海量数据集 & 强大数据管理: 便捷接入或集成权威开源航拍数据集(涵盖交通、城市、农业等)。即使使用自有数据,平台提供完善的标注、管理、版本控制工具,大幅节省数据准备时间。

- 可视化高效训练 & 自动化调优:
- 直观的可视化界面设置参数,实时监控训练指标(Loss, mAP 等)。
- 支持一键发起并行实验,同时比较多个模型(如 YOLOv5s vs YOLOv7-tiny)或配置,快速锁定最优候选。
- 支持分布式训练,充分利用硬件资源加速训练。
- 多模态大模型智能推荐: 基于任务类型、数据特点和训练反馈,自动推荐数据增强策略、模型优化建议及可能的更好模型选择,让迭代事半功倍。

- 便捷的模型优化与导出: 支持将训练好的模型导出为 ONNX、TensorRT 等通用格式,便于集成到实际无人机系统或业务平台。

- 免环境配置:直接调用预置框架(PyTorch、TensorFlow等);
- 免复杂参数调整:内置自动化训练流程,小白也能轻松上手;
- 高性能算力支持:分布式训练加速,快速产出可用模型;
- 无缝部署:训练完成的模型可直接导出,或通过API接入业务系统。
!!点击下方链接,立即体验Coovally!!
结论
本研究提出了一种基于检测置信度的自适应路径规划方法,该方法将高空覆盖路径与低空检测相结合。该路径规划器在基于无人机RGB影像生成的真实正射影像上进行了评估。通过比较不同的检测确定性度量方法,结果表明标准YOLOv8置信度值最能有效区分真假阳性检测,因此最适合用于自适应路径规划器来确定对检测到但不确定植株的低空检测。当植株呈聚集分布时,与低空覆盖路径规划器相比,自适应规划器的飞行路径缩短了37%,而F1分数仅降低2%。当目标在田间均匀分布时,自适应路径规划器的飞行路径缩短了6%,F1分数降低2%。通过执行低空检测,自适应路径规划器比覆盖路径规划器更能应对无人机的定位误差。当目标均匀分布时,除非田间目标密度低于80-120个/公顷,否则覆盖路径效率更高。然而,当目标呈非均匀分布时,在目标密度达到250-300个/公顷之前,自适应路径规划器都比低空覆盖路径更快。综上所述,所提出的自适应路径规划器能够比覆盖路径规划器更快地发现田间非均匀分布的目标,同时保持相当的检测精度。