导读
本文提出一种基于无人机图像与YOLOv5算法的高空作业安全带检测方法 。通过将CSPNet集成到Darknet53骨干网络、引入Focus层、替换SPP为SPPF模块以及在PANet应用CSPNet策略,显著提升了模型性能 。该方法在自建无人机数据集上实现了99.2%的mAP50和156.25 FPS ,有效解决了电力施工现场小目标(安全带)检测精度低的问题,为高空作业安全监管提供了高效精准的解决方案。
无人机在监测高空作业人员安全带佩戴方面具有多重优势。首先,无人机可实现高空作业现场全方位、多角度监控。其次,无人机配备的高精度摄像头能准确检测识别作业人员安全带佩戴情况,实现快速精准的安全检测,避免漏检误检。再次,无人机在实时反馈检测结果的同时,可通过无线通信技术将检测结果及时传至监管人员终端设备,便于监管人员及时采取措施,避免安全事故发生。此外,无人机在监控高空作业时,还能根据实际需求自由调整监控角度与范围,从而提高监控效率与精度。因此,无人机在监测高空作业人员安全带佩戴方面具有安全、高效、精准等多重优势,能有效提升高空作业安全性与监管水平。当前无人机在电力线路安全检测领域的应用尚处起步阶段,但发展潜力巨大,行业对其潜在优势的认可度高度一致。未来无人机技术将持续优化性能与技术,提升适用性与可靠性,在电力线路安全检测领域发挥更大价值与作用。
论文标题:
Detection method of the seat belt for workers at height based on UAV image and YOLO algorithm
论文 链接 :
YOLOv5目标检测算法
YOLO作为单阶段算法的代表,通过将目标检测任务转化为回归问题,可在单次前向传播中同时预测目标的类别和位置信息,因此具有极快的检测速度,非常适用于实时检测场景。YOLOv5为解决高空作业人员安全带佩戴检测问题提供了极具前景的解决方案。该算法在检测精度、速度和模型尺寸方面均有显著提升,能更好满足高空作业安全带佩戴检测需求。采用YOLOv5可有效避免高空作业中因安全带佩戴不当引发的事故,保障作业人员的生命安全与身体健康。
- YOLOv5架构
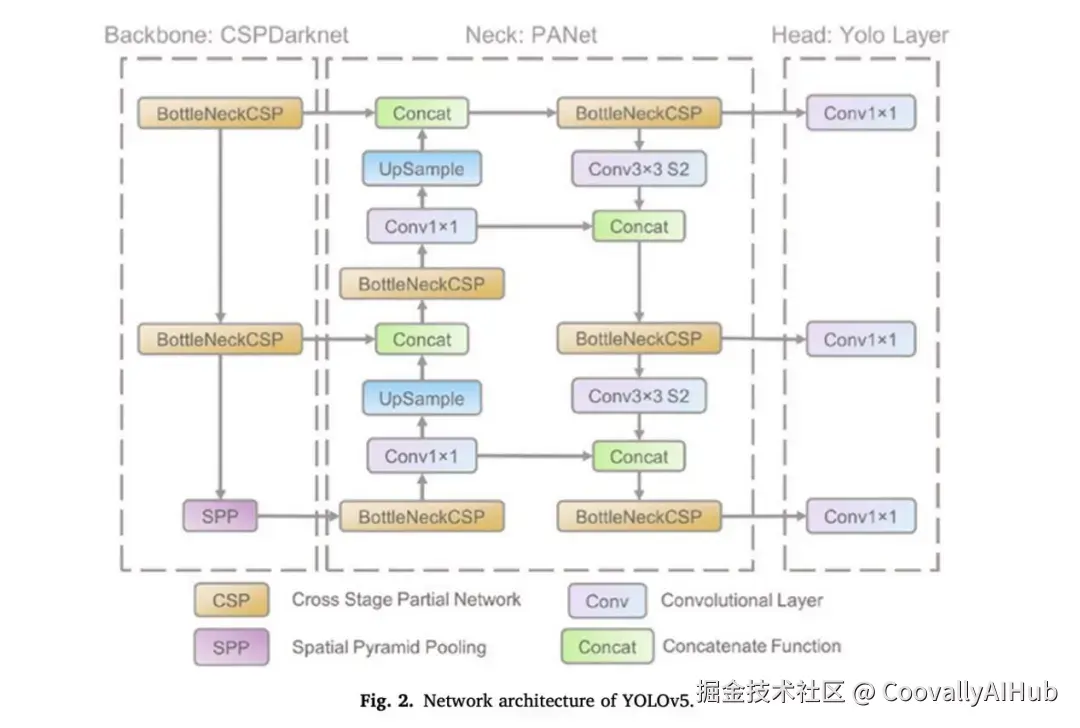
所有YOLOv5模型均由相同三大组件构成:采用CSP-Darknet53作为骨干网络,SPP和PANet构成特征融合网络,检测头则沿用YOLOv4设计,如图2所示。
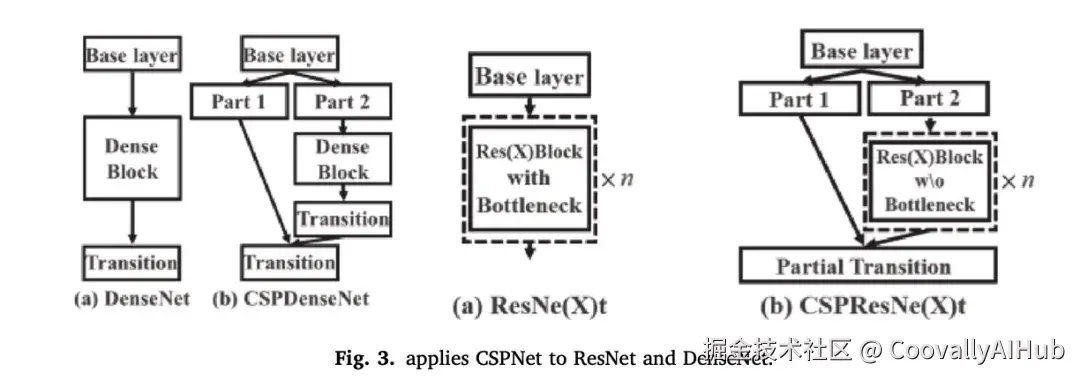
YOLO作为深度网络,通过残差结构和密集块将信息传递至最深层以解决梯度消失问题。但使用密集块和残差块会带来梯度冗余问题。CSPNet通过截断梯度流解决该问题,如图3所示。
YOLOv5对特征融合网络进行两大改进:采用空间金字塔池化(SPP)变体,并在路径聚合网络(PANet)中引入BottleNeckCSP结构。
具体YOLOv5算法架构可参考从YOLOv5到训练实战:易用性和扩展性的加强文章
数据集与模型训练
- 数据集准备
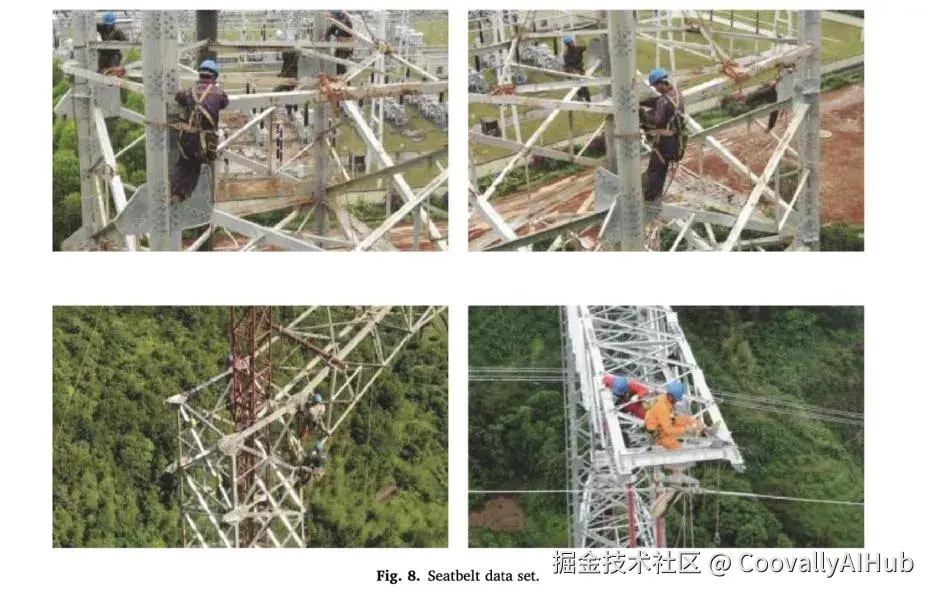
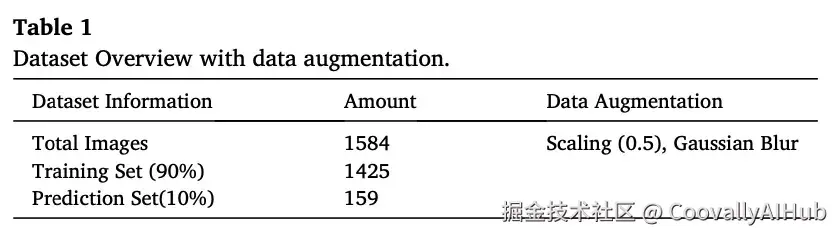
数据集是解决实际工业问题的基础。本实验采用无人机航拍人员佩戴安全带图像构建数据集(如图8所示)。为模拟无人机图像采集可能遇到的低分辨率或弱光条件,对原始图像进行比例缩放和模糊处理的数据增强操作:缩放比例为0.5时将图像尺寸减半以模拟细节丢失,采用OpenCV高斯模糊方法通过像素加权平均降低图像清晰度,从而复现航拍图像常见的模糊或低分辨率状态。
数据集采用VOC格式标注(如图9所示),共计1584张图像。按9:1比例随机划分为训练集和测试集,数据增强后的数据集概况如表1所示。

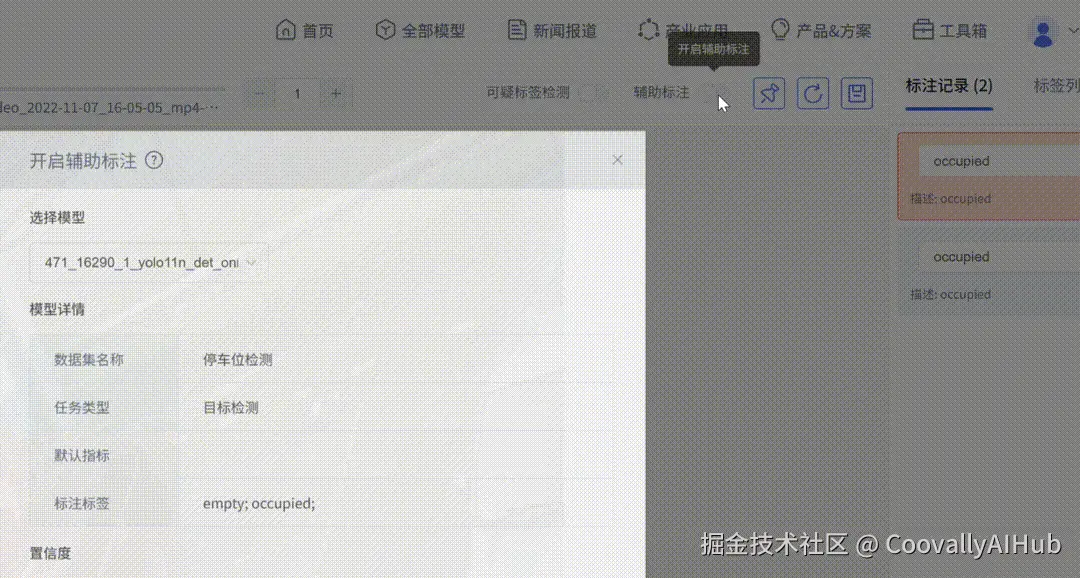
在实际项目中,数据标注往往耗费大量时间。借助Coovally平台的智能标注工具,用户可直接在Web端完成标注任务,无需本地部署。平台支持矩形、多边形等多种标注方式,兼容COCO、YOLO等主流格式。
- 模型训练
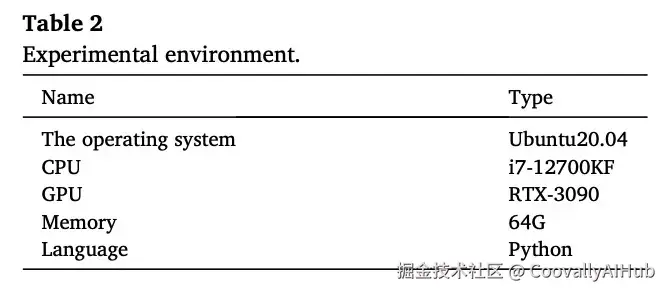
实验软硬件配置环境如表2所示。相比其他目标检测算法,YOLO系列具有显著优势:R-CNN系列计算复杂度高、速度慢;SSD虽对小目标检测效果较好但对大目标效率略低;RetinaNet通过新型损失函数解决类别不平衡问题但速度不及YOLO;Mask R-CNN擅长实例分割但实时性不足。YOLO算法单次前向传播即可完成检测,在速度、实时性、全局上下文考量等方面具有综合优势。
YOLOX、YOLOv5和YOLOv7均为基于深度学习的目标检测算法,均采用卷积神经网络和锚框预测机制,通过网格划分实现目标定位与分类。三者的差异在于:YOLOX新增SPP-MBConv模块并采用GIOU损失提升精度;YOLOv5通过新型网络结构和数据增强方法提升速度与精度;YOLOv7引入自对抗训练、坐标注意力等机制增强检测鲁棒性。相较而言,YOLOv5在检测速度、模型体积、通用性等方面表现更优,其创新的网络结构和训练方法使其更易于适配不同应用场景。
分析完了不同场景下的算法选型思路,现在问题来了:你愿意自己找模型、下代码、搭环境、调参数吗?
你愿意花几天甚至几周,只为试出一个还说不准对不对的模型吗?
如果答案是否定的,那你需要的是------Coovally平台!
** **
**
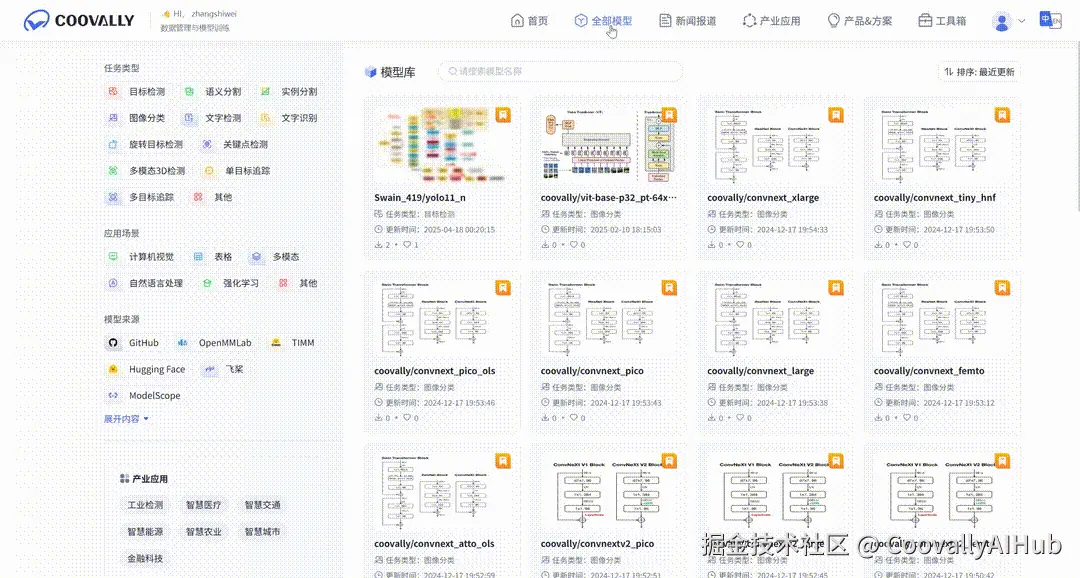
在Coovally的模型仓库中, YOLOv3/v4/v5/v7/v8/11、Faster R-CNN、RetinaNet、DETR、DeepSort、Mask R-CNN... 主流和前沿模型触手可及。 你不用再四处寻找、下载、配置环境。一键加载,自由组合! 想试试YOLOv8在铁路小目标上的效果?还是探索Mask R-CNN对农业病虫害的识别能力?点几下鼠标,模型就绪。
- 内置海量开源数据集 & 便捷数据管理!
Coovally 集成了或提供便捷接入众多权威开源航拍数据集,涵盖交通、城市、农业等多个领域。省去你80%的数据搜集整理时间!即使你有自己的数据,平台提供强大的数据标注、管理、版本控制工具,让你的数据工作流井井有条。

- 高效训练平台 & 自动化!
告别复杂的命令行和配置!Coovally 提供直观的可视化训练界面,清晰设置参数,监控训练过程(Loss, mAP等指标实时可视化) 。并行实验,效率倍增! 想同时比较 YOLOv5s, YOLOv7-tiny在你的数据集上的表现?一键发起多个训练任务并行运行,结果一目了然,快速锁定候选者。支持分布式训练,充分利用硬件资源,大幅缩短训练时间。

大模型辅助提升根据数据统计分布特点和任务类型等信息,基于多模态大模型技术自动推荐数据增强方法及模型选择建议。Coovally还有多模态大模型智能推荐,根据模型配置信息和任务类型以及训练结果等信息,自动推荐优化建议,让模型迭代事半功倍!

- 实验结果与分析
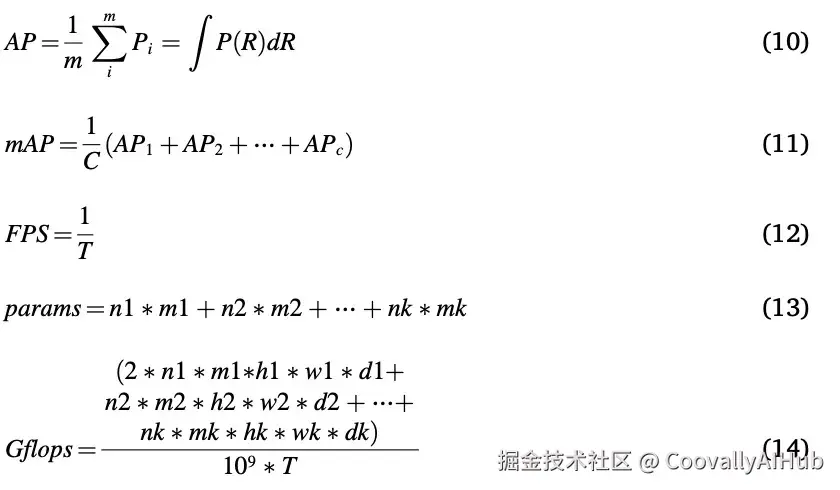
采用mAP50、FPS 、参数量 (Params) 和计算量 (Gflops) 作为模型性能评价指标:
- mAP50:IoU阈值为0.5时的平均精度,反映算法检测准确度
- FPS:每秒处理帧数,衡量模型推理速度
- Params:参数量,评估模型复杂度
- Gflops:每秒浮点运算次数,表征计算效率
各指标计算公式如式(10)-(14)所示。其中AP计算基于查准率-查全率曲线,mAP为各类别AP均值;FPS与单次推理时间T成反比;参数量与计算量分别由网络各层通道数和特征图尺寸决定。
经300轮训练对比实验,YOLOv5表现最优(具体数据对比见表3)。关键结论如下:
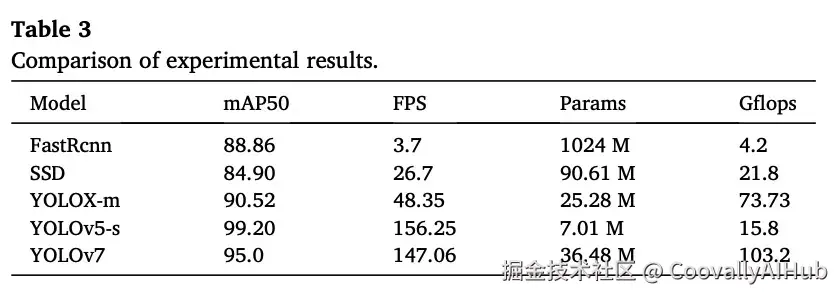
- 检测精度: YOLOv5-s以99.20%的mAP50显著优于YOLOX-m(90.52%)和YOLOv7(95.0%),表明网络复杂度会影响识别精度
- 实时性能: YOLOv5-s的FPS达156.25帧/秒,高于YOLOv7(147.06)和YOLOX-m(48.35),适合大规模实时图像处理
- 模型轻量化: YOLOv5-s参数量仅7.01M,远低于YOLOX-m(25.28M)和YOLOv7(36.48M),更适配移动端设备
- 计算效率: YOLOv7计算量最高(103.2Gflops),YOLOv5-s最低(15.8Gflops),但综合考量下YOLOv5-s在资源受限环境中仍具优势
实验表明,YOLOv5-s在轻量化场景中综合表现最佳,其快速推理和小模型特性特别适合无人机等移动平台的实时检测需求;而YOLOv7在精度与速度的平衡性上表现良好,可作为对计算资源不敏感场景的备选方案。传统算法如FastRcnn和SSD在各项指标上均已明显落后。
结论
为解决现有安全带佩戴检测模型在电力线路施工现场存在小目标识别效果差、检测精度低的问题,本文提出基于YOLOv5模型的无人机图像安全带佩戴检测方法。YOLOv5将CSPNet应用于Darknet53主干网络,在CSP-Darknet53中集成Focus层,将模型特征融合网络的SPP模块替换为SPPF模块,并对PANet模型实施CSPNet策略。YOLOv5解决了网格敏感性问题,能够轻松检测中心点位于边缘的边界框,具有精度高、速度快、鲁棒性强、通用性好和易用性高等优势。与Fast R-CNN、SSD、YOLOX和YOLOv7等主流目标检测模型相比,YOLOv5在小目标检测场景取得显著进步,实现了99.2%的优异mAP值。特别是在电力施工场景中,该方法在安全带检测方面更具优势。本研究提出的基于YOLOv5模型的安全带佩戴检测方法可有效应用于复杂电力施工现场,对施工人员安全监管具有重要意义。未来研究将聚焦于扩展数据集、增加检测类别和扩大模型检测范围,以提升实际应用中的检测性能。