文章目录
- 一、深度学习基础认知
- 二、神经网络核心构造解析
-
- [2.1 神经元的基本原理](#2.1 神经元的基本原理)
- [2.2 感知器:最简单的神经网络](#2.2 感知器:最简单的神经网络)
- [2.3 多层感知器:引入隐藏层解决非线性问题](#2.3 多层感知器:引入隐藏层解决非线性问题)
-
- [2.3.1 多层感知器的结构特点](#2.3.1 多层感知器的结构特点)
- [2.3.2 偏置节点的作用](#2.3.2 偏置节点的作用)
- [2.3.3 多层感知器的计算过程](#2.3.3 多层感知器的计算过程)
- 三、神经网络训练核心方法
-
- [3.1 损失函数:衡量预测误差](#3.1 损失函数:衡量预测误差)
- [3.2 正则化惩罚:防止过拟合](#3.2 正则化惩罚:防止过拟合)
- [3.3 梯度下降:优化权重参数](#3.3 梯度下降:优化权重参数)
-
- [3.3.1 核心概念](#3.3.1 核心概念)
- [3.3.2 梯度下降的步骤](#3.3.2 梯度下降的步骤)
- [3.4 BP 神经网络:反向传播优化](#3.4 BP 神经网络:反向传播优化)
-
- [3.4.1 BP 神经网络的步骤](#3.4.1 BP 神经网络的步骤)
一、深度学习基础认知
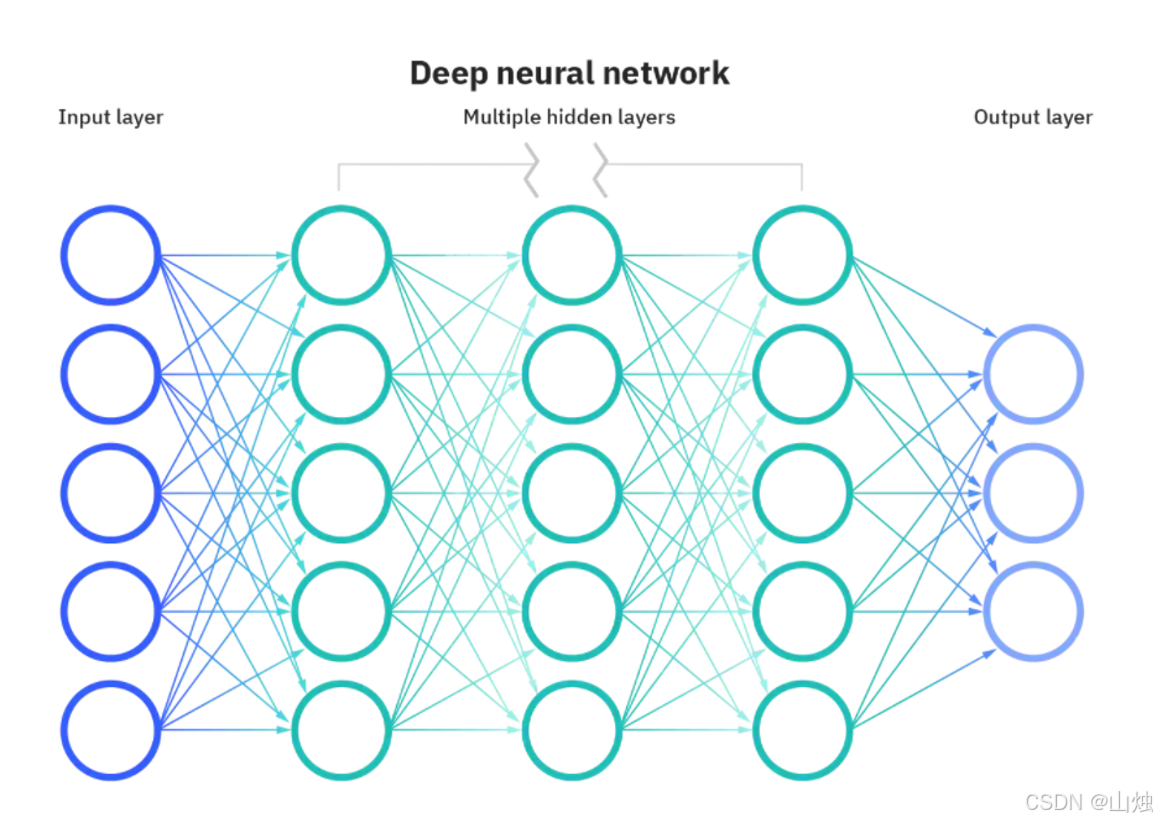
首先,我们要明确深度学习在人工智能领域的定位。深度学习(DL, Deep Learning)是机器学习(ML, Machine Learning)领域中一个重要的研究方向,而神经网络又是深度学习的核心载体,三者的关系可以简单理解为:人工智能包含机器学习,机器学习包含深度学习,深度学习以神经网络为核心技术支撑。
简单来说,深度学习就是通过构建多层神经网络,让机器从大量数据中自主学习特征和规律,从而实现对未知数据的预测或分类。比如我们常见的图像识别、自然语言处理等应用,背后都离不开深度学习技术的支持。
二、神经网络核心构造解析
神经网络是深度学习的"灵魂",它由大量的节点(神经元)和节点间的连接构成。下面我们从基础组件到复杂结构,一步步拆解神经网络的构造。
2.1 神经元的基本原理
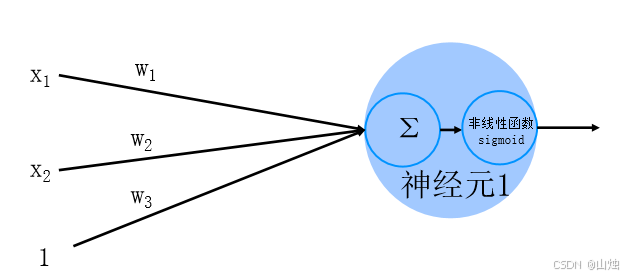
神经元是神经网络的最小单位,其核心是通过线性计算与非线性激活函数的结合,实现对输入信息的处理。
-
线性计算部分 :神经元会接收多个输入信号(如 x 1 , x 2 , x 3 x_1, x_2, x_3 x1,x2,x3),每个输入信号都对应一个权重( w 1 , w 2 , w 3 w_1, w_2, w_3 w1,w2,w3),表示该输入的重要程度。首先会计算输入与权重的加权和,公式如下:
z = w 1 x 1 + w 2 x 2 + w 3 x 3 + b z = w_1x_1 + w_2x_2 + w_3x_3 + b z=w1x1+w2x2+w3x3+b其中 b b b 是偏置项,用于调整神经元的激活阈值。为了方便计算,我们可以将偏置项转化为权重形式(令 x 3 = 1 , w 3 = b x_3 = 1, w_3 = b x3=1,w3=b),此时公式可简化为 z = w 1 x 1 + w 2 x 2 + w 3 × 1 z = w_1x_1 + w_2x_2 + w_3 \times 1 z=w1x1+w2x2+w3×1,这种形式更便于后续的矩阵运算。
-
非线性激活函数 :经过线性计算得到的 z z z 会传入激活函数,引入非线性特性。常用的激活函数是 sigmoid 函数,它能将输出值映射到 0 到 1 之间,公式为:
g ( z ) = 1 1 + e − z g(z) = \frac{1}{1 + e^{-z}} g(z)=1+e−z1
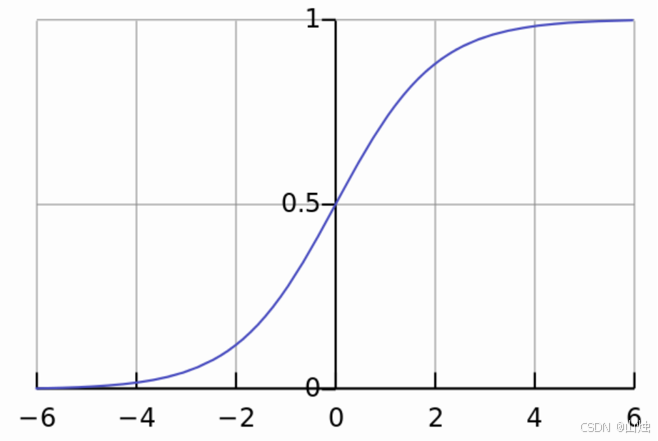
为什么需要非线性激活函数?因为如果只有线性计算,无论神经网络有多少层,最终的输出仍然是输入的线性组合,无法处理复杂的非线性问题(如图像中的边缘、纹理等特征)。
2.2 感知器:最简单的神经网络
感知器是由两层神经元组成的神经网络,是神经网络的"雏形"。它的结构非常简单:
- 输入层:接收数据特征,节点数与特征维度一致(如输入数据是 3 维特征,输入层就有 3 个节点)。
- 输出层 :输出预测结果,节点数与目标维度一致(分类问题,输出层有 1 个节点)。
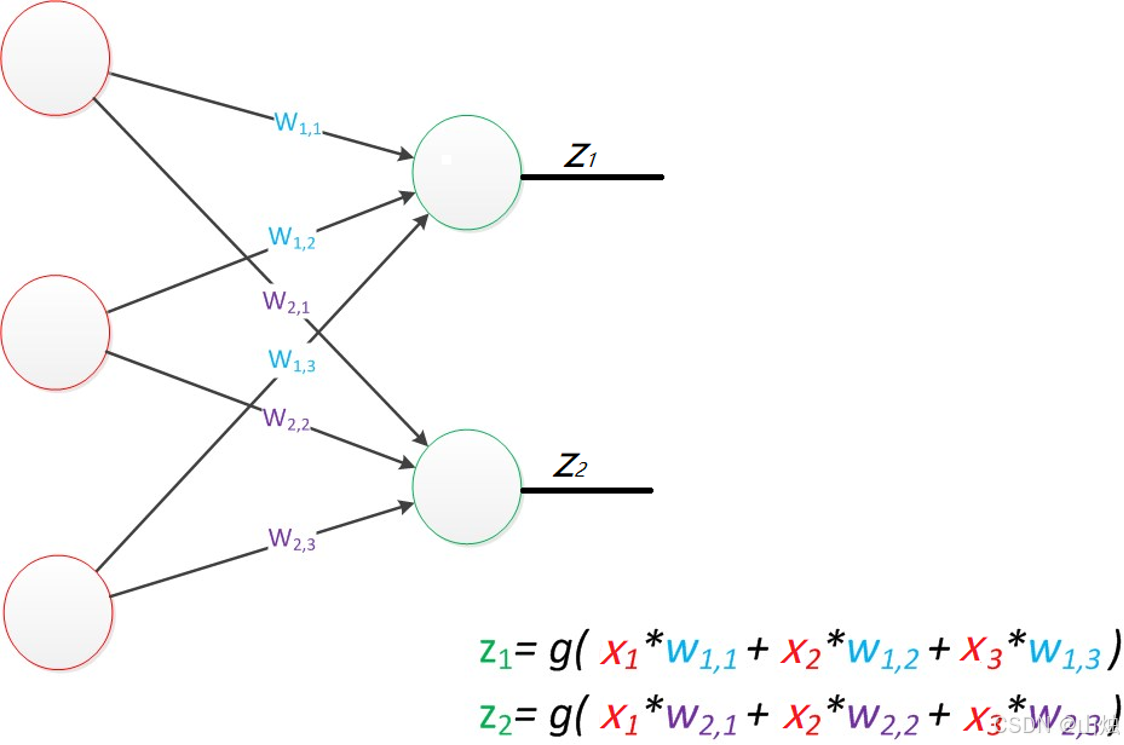
感知器的计算过程可以用矩阵乘法表示。假设输入特征向量为 x = x 1 x 2 x 3 x = \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} x= x1x2x3 ,权重矩阵为
W = w 11 w 12 w 13 w 21 w 22 w 23 W = \begin{bmatrix} w_{11} & w_{12} & w_{13} \\ w_{21} & w_{22} & w_{23} \end{bmatrix} W=w11w21w12w22w13w23,则输出 z z z 的计算如下:
z = g ( W × x ) z = g(W \times x) z=g(W×x)
其中 g g g 是激活函数。需要注意的是,感知器只能处理线性可分的数据(如用一条直线就能将两类数据分开的情况),无法处理非线性可分问题(如异或问题)。
2.3 多层感知器:引入隐藏层解决非线性问题
为了解决感知器的局限性,我们在输入层和输出层之间增加了隐藏层 ,形成了多层感知器(MLP)。隐藏层是神经网络能处理非线性问题的关键,其核心作用是通过多层非线性变换,逐步提取数据中的复杂特征。
2.3.1 多层感知器的结构特点
- 输入层 :节点数固定,与特征维度匹配(如输入是 6 维特征,输入层有 6 个节点 x 1 , x 2 , . . . , x 6 x_1, x_2, ..., x_6 x1,x2,...,x6)。
- 隐藏层:节点数可自由设定,目前没有统一的理论指导,通常根据经验或实验调整(比如先尝试 32、64、128 个节点,选择模型效果最好的数量)。
- 输出层:节点数固定,与目标维度匹配(如多分类有 3 个类别,输出层有 3 个节点)。
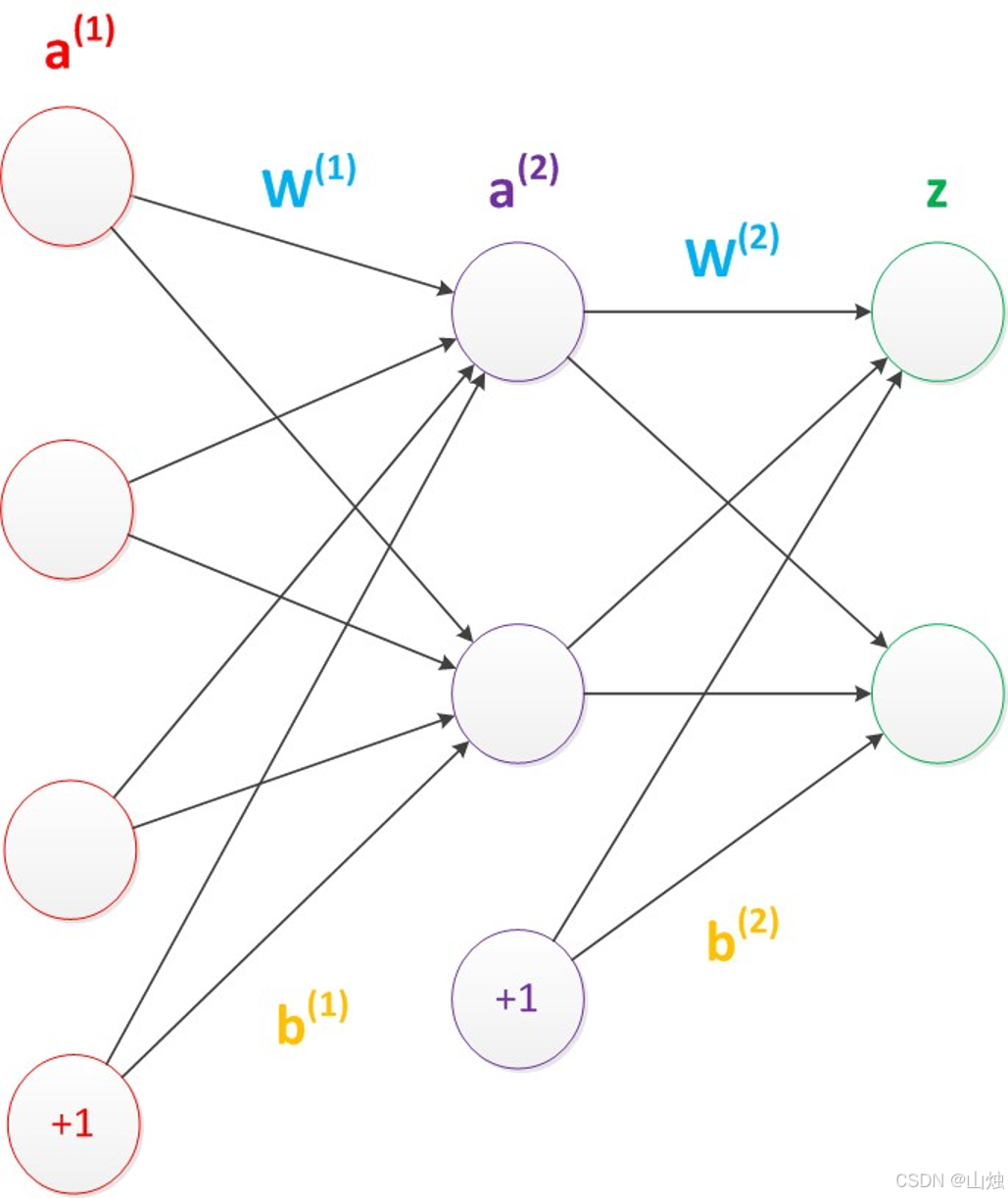
2.3.2 偏置节点的作用
在神经网络的每个层次中(除输出层外),都会默认存在一个偏置节点。它的特点是:
- 存储值永远为 1,只负责提供偏置项,不接收前一层的输入(没有箭头指向它)。
- 作用是调整神经元的激活阈值,让模型能更好地拟合数据(比如当所有输入都为 0 时,偏置项可以让神经元仍然有输出)。
2.3.3 多层感知器的计算过程
以"输入层→1 个隐藏层→输出层"的结构为例,计算过程分为两步:
-
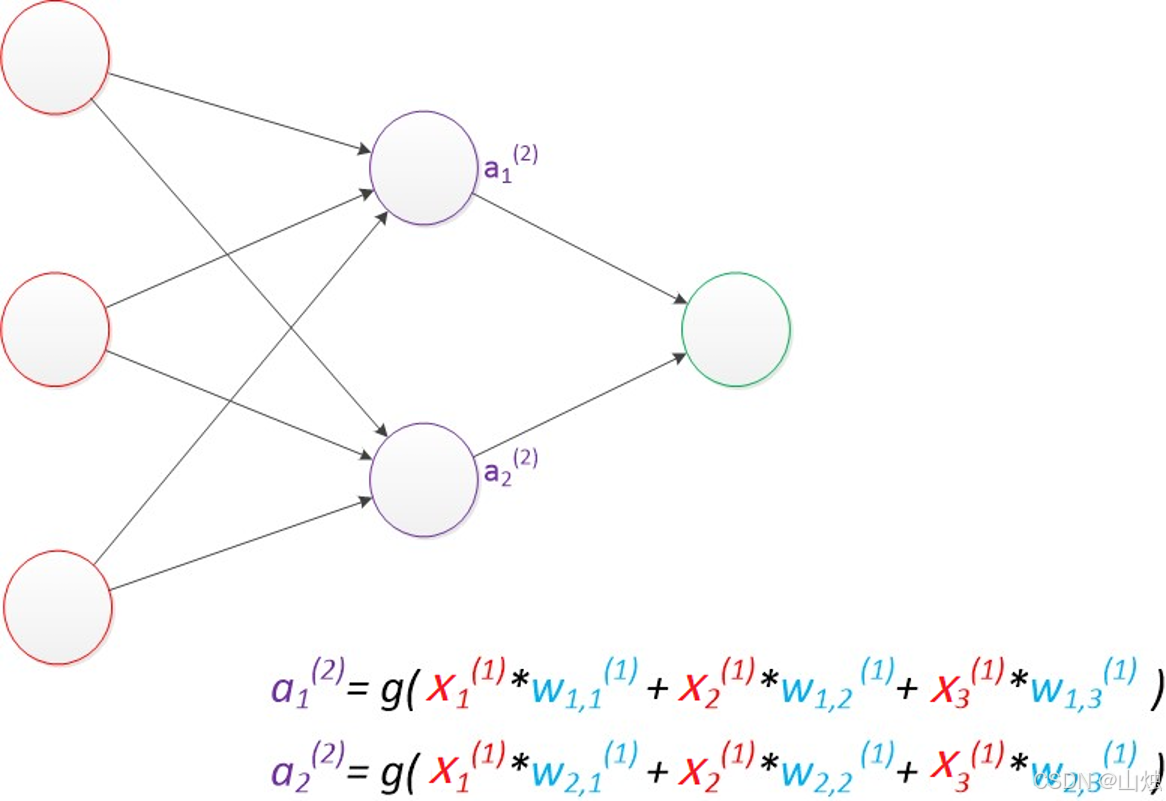
隐藏层计算 :输入层节点的输出作为隐藏层节点的输入,经过加权和与激活函数后,得到隐藏层的输出 a 1 ( 2 ) a_1^{(2)} a1(2), a 2 ( 2 ) a_2^{(2)} a2(2)(上标 2 表示隐藏层是第 2 层):
a 1 ( 2 ) = g ( x 1 w 11 ( 2 ) + x 2 w 12 ( 2 ) + x 3 w 13 ( 2 ) ) a_1^{(2)} = g(x_1w_{11}^{(2)} + x_2w_{12}^{(2)} + x_3w_{13}^{(2)}) a1(2)=g(x1w11(2)+x2w12(2)+x3w13(2))
a 2 ( 2 ) = g ( x 1 w 21 ( 2 ) + x 2 w 22 ( 2 ) + x 3 w 23 ( 2 ) ) a_2^{(2)} = g(x_1w_{21}^{(2)} + x_2w_{22}^{(2)} + x_3w_{23}^{(2)}) a2(2)=g(x1w21(2)+x2w22(2)+x3w23(2)) -
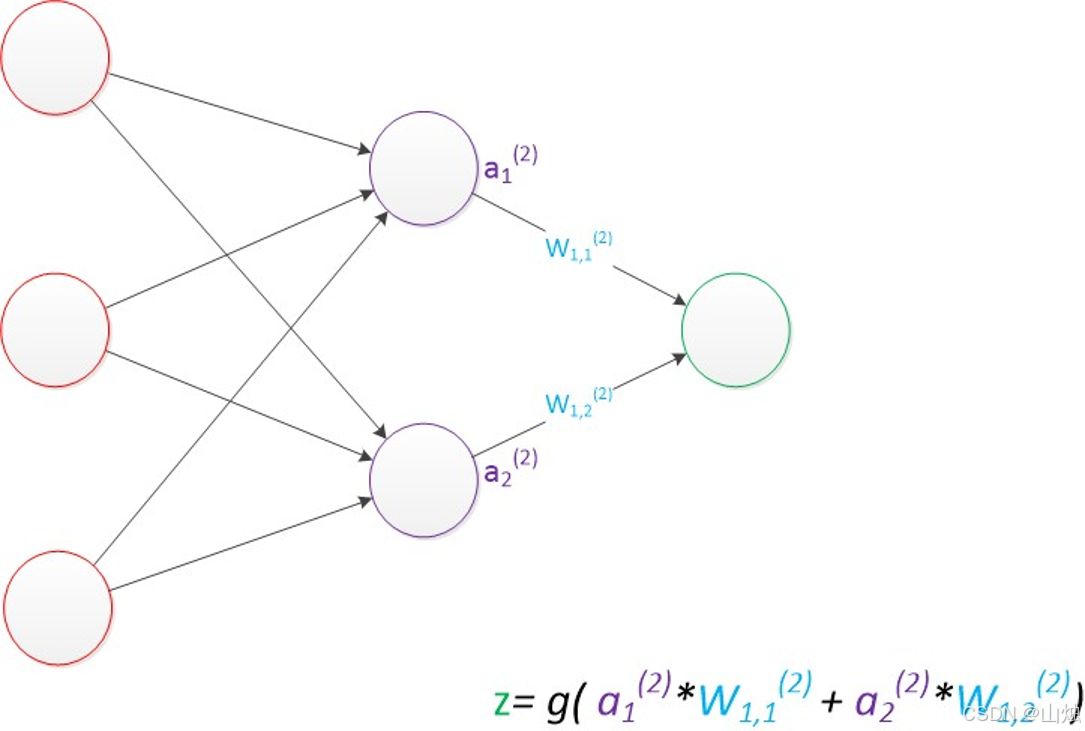
输出层计算 :隐藏层的输出作为输出层节点的输入,再次经过加权和与激活函数后,得到最终的预测结果 z z z:
z = g ( a 1 ( 2 ) w 11 ( 3 ) + a 2 ( 2 ) w 12 ( 3 ) ) z = g(a_1^{(2)}w_{11}^{(3)} + a_2^{(2)}w_{12}^{(3)}) z=g(a1(2)w11(3)+a2(2)w12(3))(上标 3 表示输出层是第 3 层)
三、神经网络训练核心方法
神经网络的训练过程,本质上是通过调整权重参数,让模型的预测结果尽可能接近真实值。这个过程主要包括损失函数计算、正则化惩罚、梯度下降优化和反向传播四个关键步骤。
3.1 损失函数:衡量预测误差
损失函数(Loss Function)用于量化模型预测值与真实值之间的误差,误差越小,模型效果越好。常用的损失函数有以下几种:
| 损失函数类型 | 适用场景 | 核心公式(简化版) |
|---|---|---|
| 0-1 损失函数 | 分类问题 | L = 1 L = 1 L=1 (预测错误), L = 0 L = 0 L=0 (预测正确) |
| 均方差损失 | 回归问题 | L = 1 n ∑ i = 1 n ( y i − y ^ i ) 2 L = \frac{1}{n} \sum_{i=1}^{n} (y_i - \hat{y}_i)^2 L=n1∑i=1n(yi−y^i)2 ( y i y_i yi 真实值, y ^ i \hat{y}_i y^i 预测值) |
| 平均绝对差损失 | 回归问题 | L = 1 n ∑ i = 1 n ∣ y i − y ^ i ∣ L = \frac{1}{n} \sum_{i=1}^{n} \lvert y_i - \hat{y}_i \rvert L=n1∑i=1n∣yi−y^i∣ |
| 交叉熵损失 | 分类问题(尤其是多分类) | L = − ∑ c = 1 M y i c log ( p i c ) L = -\sum_{c=1}^{M} y_{ic} \log(p_{ic}) L=−∑c=1Myiclog(pic) ( M M M 类别数, y i c y_{ic} yic 真实标签, p i c p_{ic} pic 预测概率) |
| 合页损失 | 支持向量机等分类模型 | L = max ( 0 , 1 − y i y ^ i ) L = \max(0, 1 - y_i \hat{y}_i) L=max(0,1−yiy^i) |
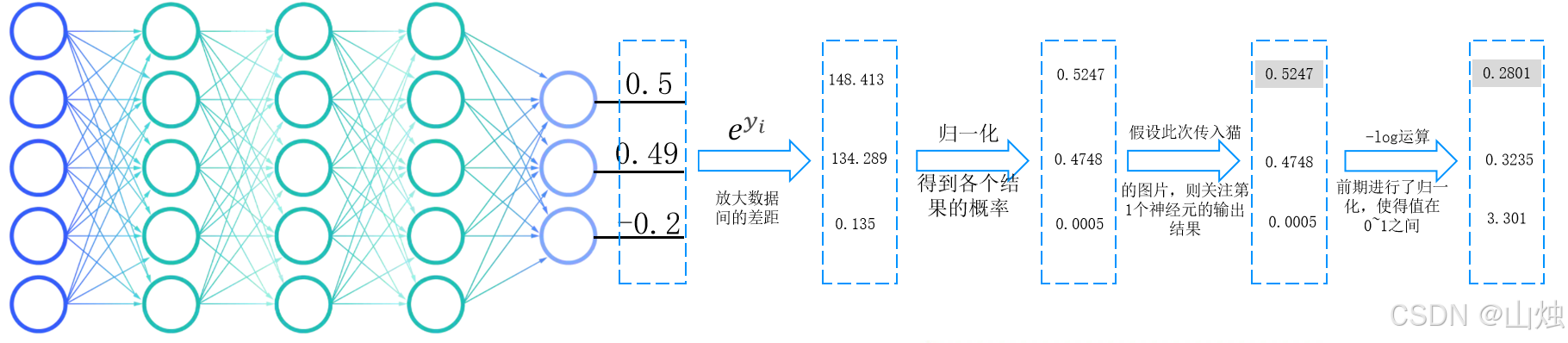
以多分类问题的交叉熵损失为例,假设我们要识别猫、狗、鸟三类图像,输入一张猫的图片:
-
模型输出层会给出三个预测值(如 148.413、134.289、0.135),首先通过归一化将其转化为 0~1 之间的概率(如 0.4748、0.5247、0.0005)。
-
真实标签为"猫",对应的 y i c y_{ic} yic 为 1, 0, 0(猫的标签为 1,其他为 0)。
-
代入交叉熵损失公式,计算得到损失值:
L = − ( 1 × log ( 0.5247 ) + 0 × log ( 0.4748 ) + 0 × log ( 0.0005 ) ) ≈ 0.645. L = -(1 \times \log(0.5247) + 0 \times \log(0.4748) + 0 \times \log(0.0005)) \approx 0.645. L=−(1×log(0.5247)+0×log(0.4748)+0×log(0.0005))≈0.645. -
若模型预测错误(如将猫预测为狗,概率为 0.9),则损失值会显著增大,从而提示模型需要调整参数。
3.2 正则化惩罚:防止过拟合
过拟合是神经网络训练中常见的问题,指模型在训练数据上表现很好,但在测试数据上表现很差(模型"死记硬背"了训练数据,没有学到通用规律)。正则化惩罚的核心是通过限制权重参数的大小,让模型更"简单",从而减少过拟合。
常用的正则化方法有 L1 正则化和 L2 正则化:
-
L1 正则化 :对权重参数的绝对值求和,公式为 ∑ i ∣ w i ∣ \sum_i |w_i| ∑i∣wi∣。它会让部分权重变为 0,实现特征选择(即忽略不重要的特征)。
-
L2 正则化 :对权重参数的平方求和,公式为 ∑ i w i 2 \sum_i w_i^2 ∑iwi2。它会让权重参数都变得较小,避免某一个特征对模型影响过大。
举个例子:假设输入向量为 x = 1 , 1 , 1 , 1 x = 1, 1, 1, 1 x=1,1,1,1,有两个权重向量 w 1 = 1 , 0 , 0 , 0 w_1 = 1, 0, 0, 0 w1=1,0,0,0 和 w 2 = 0.25 , 0.25 , 0.25 , 0.25 w_2 = 0.25, 0.25, 0.25, 0.25 w2=0.25,0.25,0.25,0.25。两者与输入的乘积都是 1,但:
- w 1 w_1 w1 只依赖第一个输入特征,容易"偏爱"这个特征,导致过拟合。
- w 2 w_2 w2 均匀利用了所有输入特征,能学到更通用的规律,泛化能力更强。
正则化惩罚会更倾向于选择 w 2 w_2 w2 这样的权重向量。
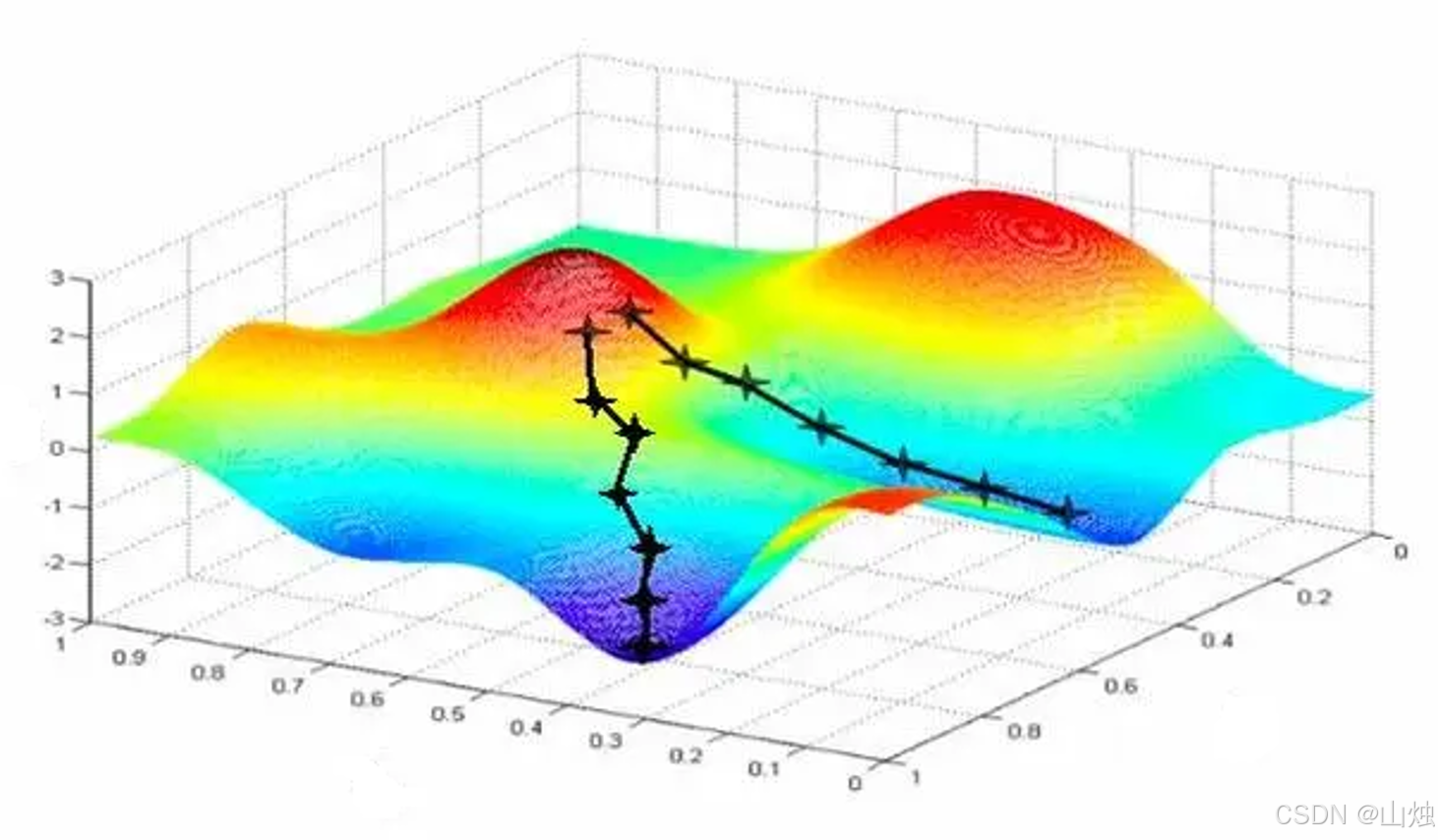
3.3 梯度下降:优化权重参数
梯度下降是调整权重参数的核心算法,其目标是找到损失函数的最小值(即模型误差最小的状态)。
3.3.1 核心概念
-
偏导数 :对于多变量函数(如损失函数 L ( w 0 , w 1 , w 2 ) L(w_0, w_1, w_2) L(w0,w1,w2)),偏导数表示函数对某一个变量的变化率(其他变量固定)。比如 ∂ L ∂ w 0 \frac{\partial L}{\partial w_0} ∂w0∂L 表示当 w 1 , w 2 w_1, w_2 w1,w2 固定时, w 0 w_0 w0 变化 1 个单位,损失函数 L L L 的变化量。
-
梯度:由所有偏导数构成的向量,方向是损失函数值增长最快的方向。因此,我们要沿着梯度的反方向调整权重,才能让损失函数值下降(即找到最小值)。
-
学习率(步长):决定每次调整权重的幅度。学习率过大会导致损失函数震荡,无法收敛;学习率过小会导致训练速度极慢,需要大量迭代。通常需要通过实验调整(如 0.001、0.01、0.1)。
3.3.2 梯度下降的步骤
-
随机初始化所有权重参数(如 w 0 , w 1 , w 2 w_0, w_1, w_2 w0,w1,w2)。
-
计算当前权重下的损失函数值 L L L。
-
计算损失函数对每个权重的偏导数(即梯度)。
-
沿着梯度反方向更新权重: w n e w = w o l d − 学习率 × ∂ L ∂ w o l d w_{new} = w_{old} - 学习率 \times \frac{\partial L}{\partial w_{old}} wnew=wold−学习率×∂wold∂L
-
重复步骤 2~4,直到损失函数值小于预设阈值(或达到最大迭代次数)。
3.4 BP 神经网络:反向传播优化
BP(Back-propagation,反向传播)是多层神经网络训练的核心算法,它结合了正向传播和反向传播,实现权重的高效更新。
3.4.1 BP 神经网络的步骤
-
正向传播 :从输入层到输出层,计算每个层的输出,最终得到模型的预测结果 y ^ \hat{y} y^。
-
计算损失函数 :根据预测结果 y ^ \hat{y} y^ 和真实标签 y y y,使用交叉熵损失等函数计算损失值 L L L。
-
反向传播:从输出层到输入层,计算损失函数对每个权重的偏导数(梯度)。由于多层神经网络的损失函数是复合函数,需要使用链式法则(即先计算输出层的梯度,再逐步推导隐藏层、输入层的梯度)。
-
权重更新:根据反向传播得到的梯度,使用梯度下降法更新所有权重参数。
-
循环迭代:重复正向传播→损失计算→反向传播→权重更新的过程,直到模型收敛。