目录
-
- [1. 摘要](#1. 摘要)
- [2. 问题描述](#2. 问题描述)
- [3. 数学模型](#3. 数学模型)
- 4.求解方法
- 5.结果展示
- 6.参考文献
- 7.代码获取
- 8.算法辅导·应用定制·读者交流
1. 摘要
无人机(UAV)技术的进步已革新多个行业,特别是在工程管理中,基于无人机的检查方法成为识别高风险建筑环境隐患的高效手段,远超传统技术。本文聚焦于无人机检查路径和调度优化,解决了禁飞区、监测时间窗口及多轮监测等带来的复杂问题。因此,本文提出了一个混合整数线性规划(MILP)模型,旨在优化检查任务分配、监测顺序调度及充电决策,该模型与传统车辆路径问题(VRP)不同,在大规模实例下,对于商业求解器具有较高的数学复杂性。为解决这一问题,本文设计了定制化变量邻域搜索算法(VNS),并通过广泛的数值实验验证了该算法的有效性与可扩展性。
2. 问题描述
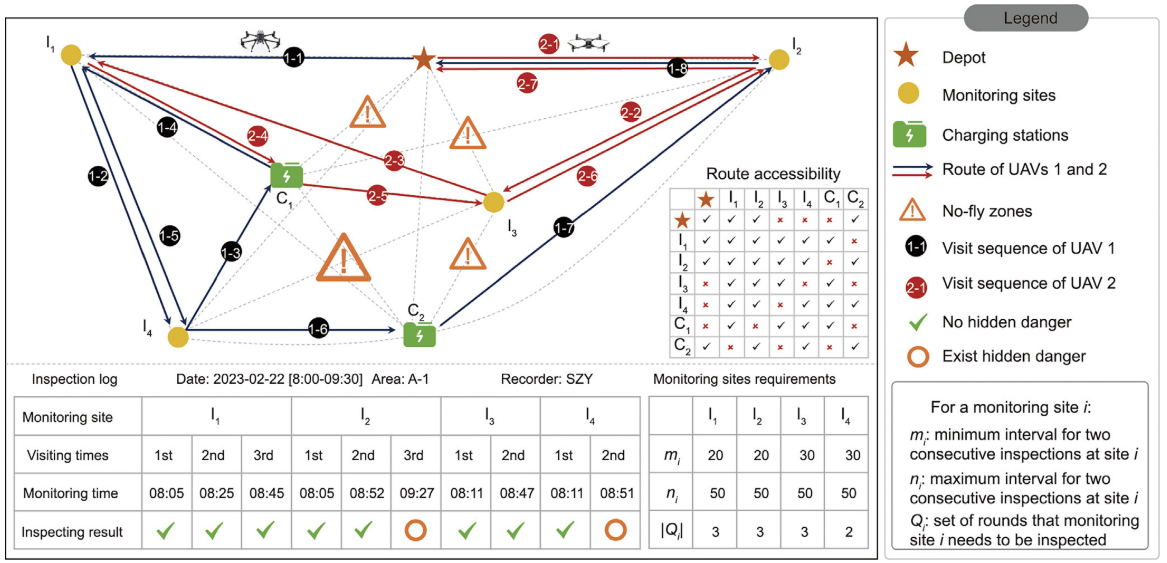
本文研究了多轮无人机检查路径规划问题,考虑了充电决策和禁飞区的影响。工程管理者需要为异构无人机分配检查任务,并规划访问各监测站点的路径以此最小化总工作时间。目前主要挑战包括电池限制、禁飞区、以及多轮检查的时间窗口要求,优化目标是确保无人机按时访问各站点,减少充电和等待时间,同时避免绕行。问题复杂性在于多次访问、路径限制和时间约束,使得路径规划和调度决策更加困难。
3. 数学模型
本节提出了一个混合整数线性规划(MILP)模型,旨在最小化完成周期性检查任务的总时间,包括飞行、等待、检查和充电时间。模型采用标准的运输网络方法,考虑起点-终点对之间的直接连接,且无人机只能在没有禁飞区的情况下飞行。
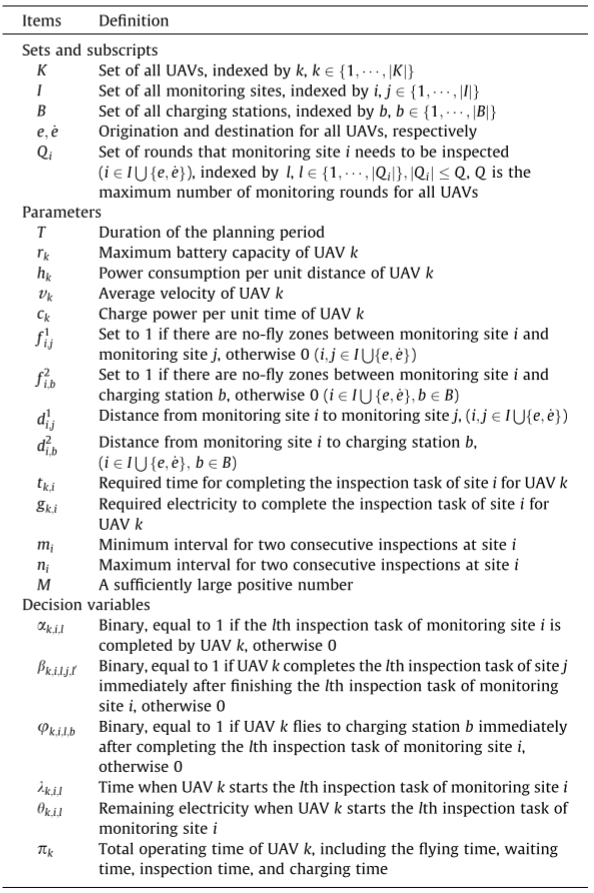


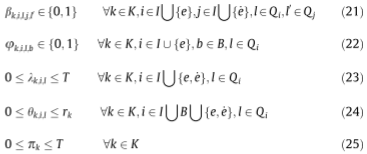
该模型的目标是最小化所有无人机完成周期性检查任务的总时间,包括飞行、等待、检查和充电时间。约束条件包括:每个任务只能分配给一架无人机;确保飞行路径符合流量守恒和禁飞区要求;充电操作在检查任务后进行;每次检查任务之间的时间间隔符合要求;电量守恒;确保无人机有足够电量完成任务或到达充电站。
4.求解方法
本文在VRP框架内综合考虑了充电决策、禁飞区约束和周期性时间窗口,使得初始模型即使在小规模实例下也难以通过CPLEX或其他商业求解器高效求解。因此,本节提出了一种基于变量邻域搜索算法(VNS),通过简化模型的构建与嵌入高效求解该问题。VNS能够有效探索解空间,避免局部最优解,并通过迭代优化提高解的质量。算法框架将问题分为三个子问题:任务分配、无人机调度和充电站选择。通过生成可行的初始解和实施有效的邻域搜索策略,VNS算法通过迭代优化获得最佳解。
初始解生成
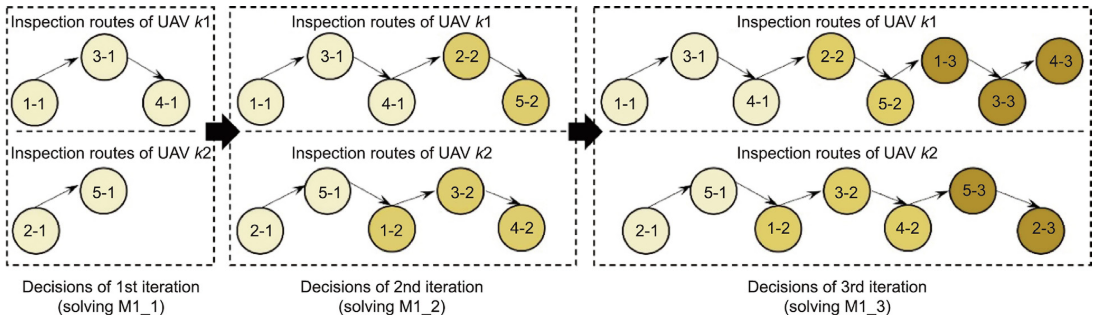
本文采用滚动优化方法生成初始解,解决了时间间隔、功率限制和禁飞区约束问题。每次迭代求解一个子模型 M 1 n M1_n M1n,模拟经典电动汽车路径问题(EVRP)和带时间窗口的电动汽车路径问题(EVRPTW)。
邻域结构
在VNS过程中,为了充分探索搜索空间,必须考虑多样的邻域结构。本文设计了四种策略来寻找新解,同时考虑多轮监测和禁飞区约束。
-
策略1:交换监测任务,策略1通过交换两个监测任务来改变检查计划,从而调整任务分配或监测顺序以获得改进的检查计划。
-
策略2:插入监测任务,策略2会改变分配给无人机的任务数量,还会局部改变无人机的任务顺序,使检查路径更为合理。
-
策略3:插入监测轮次,策略3通过插入属于同一监测轮次的监测任务来改变解决方案,从监测轮次的角度改变任务分配和监测顺序。策略3随机选择一轮监测任务,并将一些任务重新分配给另一架无人机。
-
策略4:交换检查路径,策略4通过交换两架无人机的检查路径来改变解决方案。
5.结果展示

6.参考文献
1 Zhen L, Yang Z, Laporte G, et al. Unmanned aerial vehicle inspection routing and scheduling for engineering managementJ. Engineering, 2024, 36: 223-239.
7.代码获取
xx
8.算法辅导·应用定制·读者交流
xx