比赛链接:Dog Breed Identification | Kaggle
在这场比赛中,我们将识别120类不同品种的狗。 这个数据集实际上是著名的ImageNet的数据集子集。
这里我们选择小批量进行训练出于学习目的
代码实现
先导入
python
import os
import torch
import torchvision
from torch import nn
from d2l import torch as d2l下载小数据集
python
d2l.DATA_HUB['dog_tiny'] = (d2l.DATA_URL + 'kaggle_dog_tiny.zip',
'0cb91d09b814ecdc07b50f31f8dcad3e81d6a86d')
# 如果使用Kaggle比赛的完整数据集,请将下面的变量更改为False
demo = True
if demo:
data_dir = d2l.download_extract('dog_tiny')
else:
data_dir = os.path.join('..', 'data', 'dog-breed-identification')划分数据
python
def reorg_dog_data(data_dir, valid_ratio):
labels = d2l.read_csv_labels(os.path.join(data_dir, 'labels.csv'))
d2l.reorg_train_valid(data_dir, labels, valid_ratio)
d2l.reorg_test(data_dir)
batch_size = 32 if demo else 128
valid_ratio = 0.1
reorg_dog_data(data_dir, valid_ratio)数据增强
python
transform_train = torchvision.transforms.Compose([
# 随机裁剪图像,所得图像为原始面积的0.08~1之间,高宽比在3/4和4/3之间。
# 然后,缩放图像以创建224x224的新图像
torchvision.transforms.RandomResizedCrop(224,scale=(0.8,1.0),ratio=(0.75,1.3)),
# 随机水平翻转图像
torchvision.transforms.RandomHorizontalFlip(),
# 随机变化亮度、对比度和饱和度
torchvision.transforms.ColorJitter(brightness=0.4,contrast=0.4,saturation=0.4),
torchvision.transforms.ToTensor(),
# 标准化图像
torchvision.transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
transform_test = torchvision.transforms.Compose([
torchvision.transforms.Resize(256),
torchvision.transforms.CenterCrop(224),
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
dataset
python
train_ds, train_valid_ds = [torchvision.datasets.ImageFolder(
os.path.join(data_dir, 'train_valid_test', folder),
transform=transform_train) for folder in ['train', 'train_valid']]
valid_ds, test_ds = [torchvision.datasets.ImageFolder(
os.path.join(data_dir, 'train_valid_test', folder),
transform=transform_test) for folder in ['valid', 'test']]dataset iter
python
train_iter,train_valid_iter=[torch.utils.data.DataLoader( dataset,batch_size=32,shuffle=True,num_workers=4,drop_last=True) for dataset in [train_ds,train_valid_ds]]
valid_iter = torch.utils.data.DataLoader(valid_ds, batch_size, shuffle=False,
drop_last=True)
test_iter = torch.utils.data.DataLoader(test_ds, batch_size, shuffle=False,
drop_last=False)迁移学习
python
# 迁移学习,不重新训练用于特征提取的预训练模型,训练的小型自定义输出网络替换原始输出层
# 微调是迁移学习的一种具体技术,指在预训练模型的基础上,通过继续训练(调整部分或全部参数)来适应新任务,FLOPS大
# 这里我们使用迁移学习,计算量小,只需要训练一个小型自定义输出网络
def get_net(devices):
model=torchvision.models.vit_b_16(pretrained=True)
# 获取原始分类头的输入特征维度
num_classifier_feature = model.heads.head.in_features
# 定义一个新的输出网络,共有120个输出类别
model.heads.head = nn.Sequential(
nn.Linear(num_classifier_feature, 120)
)
# 将模型移动到指定设备(如GPU)
model = model.to(devices[0])
# 冻结全部
for param in model.parameters():
param.requires_grad = False
# 只训练新添加的分类头(解冻)
for param in model.heads.head.parameters():
param.requires_grad = True
return modelloss评估函数
python
loss = nn.CrossEntropyLoss(reduction='none')
def evaluate_loss(data_iter, net, devices):
l_sum, n = 0.0, 0
for features, labels in data_iter:
features, labels = features.to(devices[0]), labels.to(devices[0])
outputs = net(features)
l = loss(outputs, labels)
l_sum += l.sum()
n += labels.numel()
return (l_sum / n).to('cpu')train code
python
def train(net, train_iter, valid_iter, num_epochs, lr, wd, devices, lr_period,
lr_decay):
# 只训练小型自定义输出网络
net = nn.DataParallel(net, device_ids=devices).to(devices[0])
trainer = torch.optim.SGD((param for param in net.parameters()
if param.requires_grad), lr=lr,
momentum=0.9, weight_decay=wd)
scheduler = torch.optim.lr_scheduler.StepLR(trainer, lr_period, lr_decay)
num_batches, timer = len(train_iter), d2l.Timer()
legend = ['train loss']
if valid_iter is not None:
legend.append('valid loss')
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],
legend=legend)
for epoch in range(num_epochs):
metric = d2l.Accumulator(2)
for i, (features, labels) in enumerate(train_iter):
timer.start()
features, labels = features.to(devices[0]), labels.to(devices[0])
trainer.zero_grad()
output = net(features)
l = loss(output, labels).sum()
l.backward()
trainer.step()
metric.add(l, labels.shape[0])
timer.stop()
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(metric[0] / metric[1], None))
measures = f'train loss {metric[0] / metric[1]:.3f}'
if valid_iter is not None:
valid_loss = evaluate_loss(valid_iter, net, devices)
animator.add(epoch + 1, (None, valid_loss.detach().cpu()))
scheduler.step()
if valid_iter is not None:
measures += f', valid loss {valid_loss:.3f}'
print(measures + f'\n{metric[1] * num_epochs / timer.sum():.1f}'
f' examples/sec on {str(devices)}')
python
devices, num_epochs, lr, wd = d2l.try_all_gpus(), 30, 1e-4, 2e-4
lr_period, lr_decay, net = 2, 0.9, get_net(devices)
train(net, train_iter, valid_iter, num_epochs, lr, wd, devices, lr_period,
lr_decay)
# train loss 0.215, valid loss 0.399
# 150.5 examples/sec on [device(type='cuda', index=0)]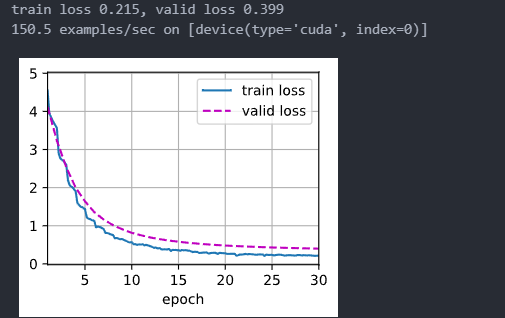
可以看到30轮后面差不多就收敛了,当然还有很多提升空间,比如数据增强or使用vit_l_16或者更大的预训练模型做迁移学习,这里不多加概述
一个低loss的代码实现:nb.pretrained.vit - Loss : 0.09921