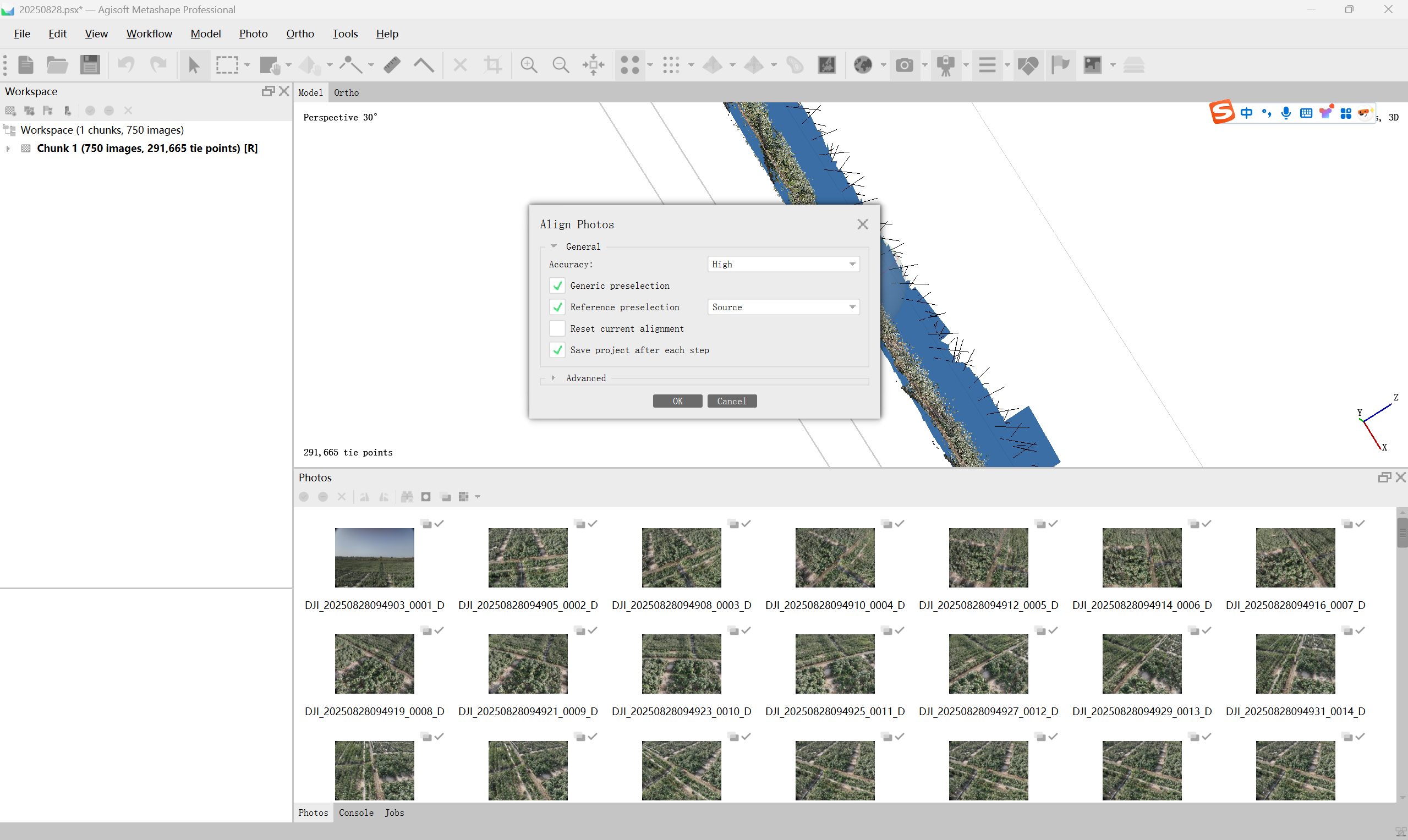
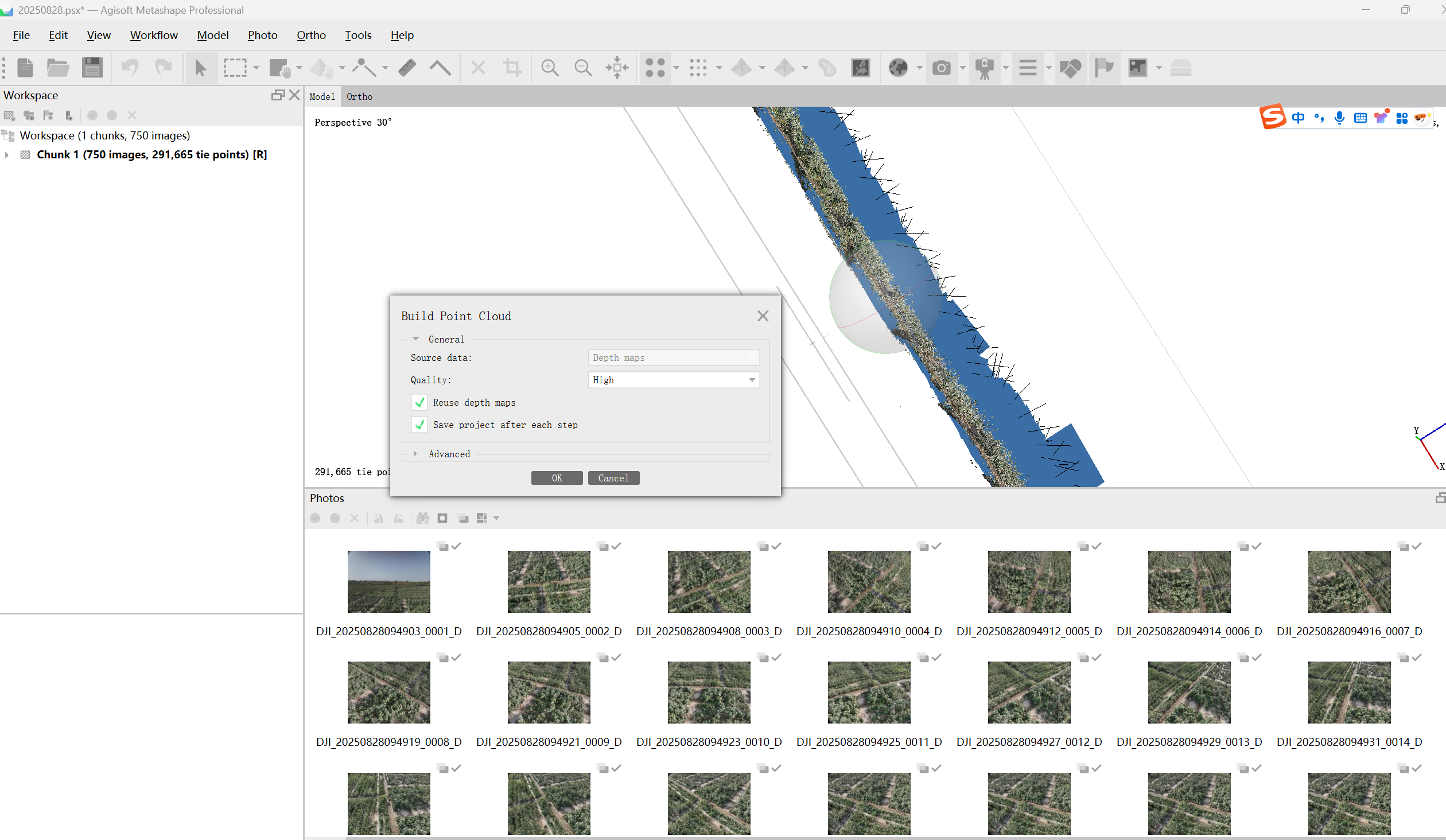
1数据生成
打开photoscan,点击workflow-Alian photos-Build point cloud
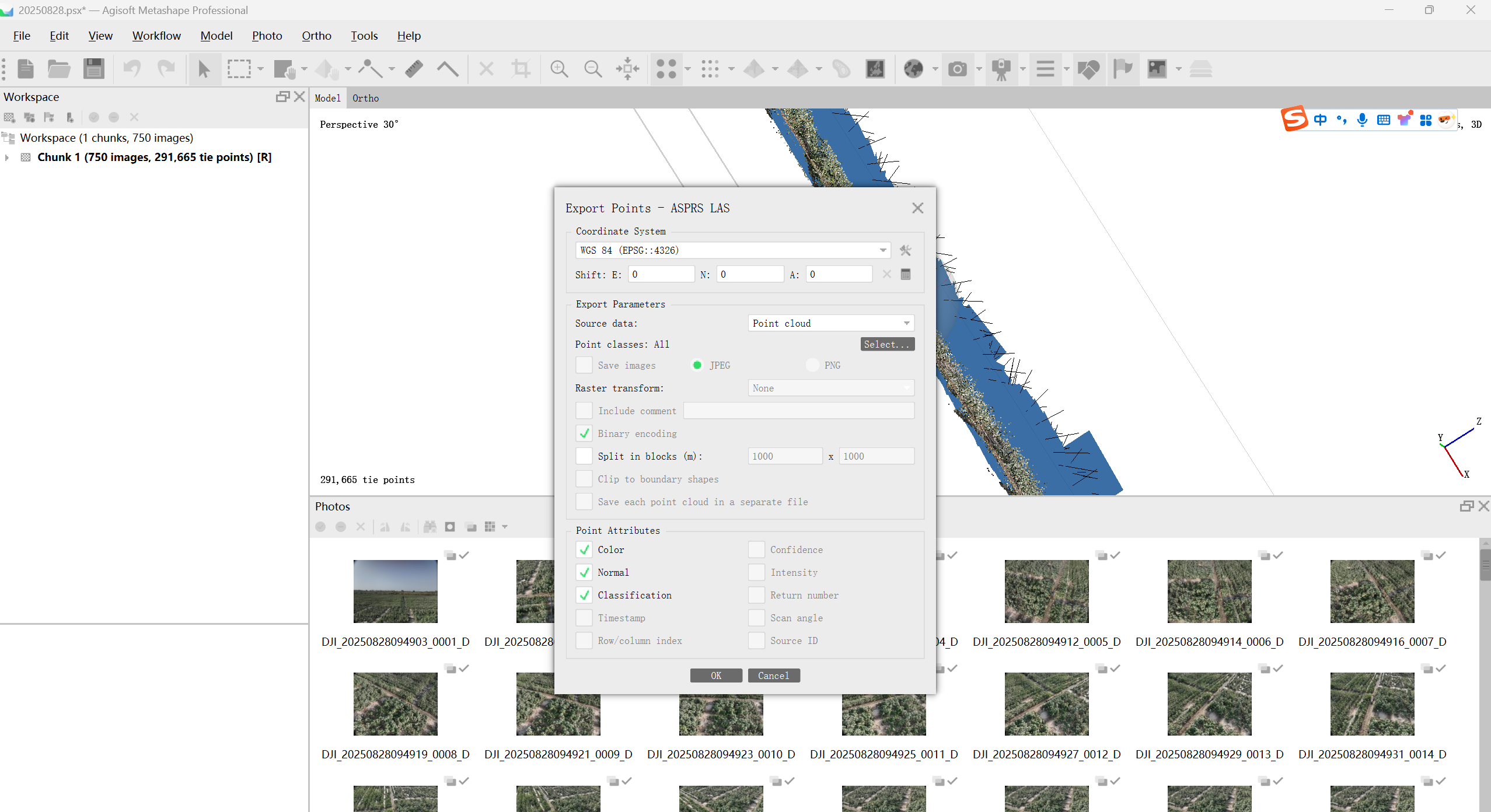
2、点云数据导出
File-Export-Export pointcloud-另存为-重点:修改坐标系:WGS 84 / UTM zone 50N (epsg:32650)
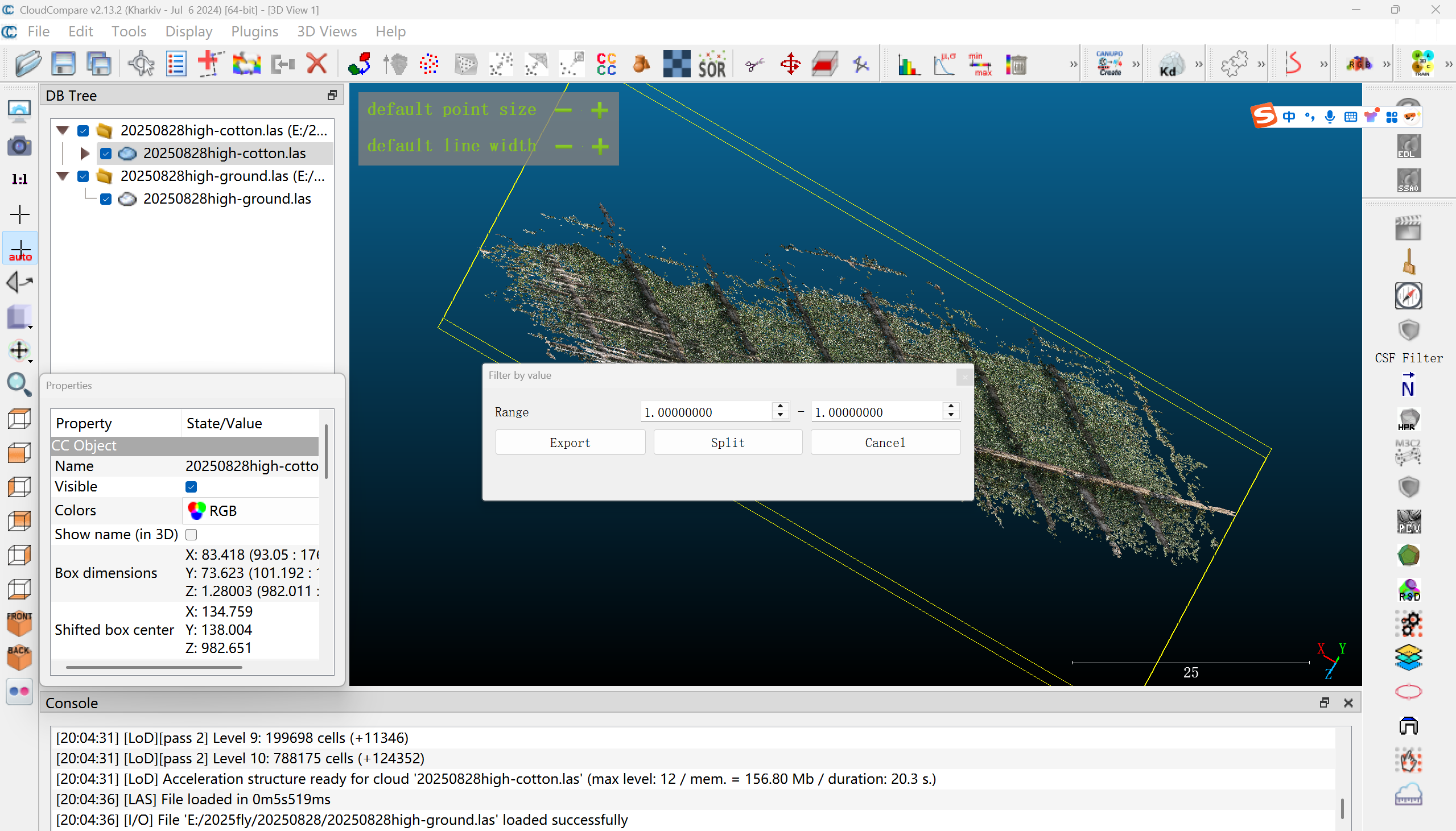
3、导入到Cloudcompare-File-open-打开你的las文件-
4、去噪
选中点云,点击 Tools -> Clean -> SOR filter (统计离群值去除)
参数设置:Mean dist. (平均距离) 设置为 8-12,Std. dev. threshold (标准差阈值) 设置为 1.0-1.5。点击 OK 。
5、地面和植株分离
基于高程(Z坐标)过滤
此方法假设地面点是点云中Z坐标(高程)较低的部分。
创建高程标量场:
选中点云实体,点击 Edit -> Scalar fields -> Export coordinate(s) to SF。
在弹出的对话框中,勾选 Z ,然后点击 OK。这会创建一个新的标量场,其中每个点的值就是其Z坐标(高程)。
按高程值过滤:
点击 Edit -> Scalar fields -> Filter by value。
在对话框中,设置一个合理的 Max 值(即你认为的地面点可能的最大高程)。所有Z值小于此值的点会被保留。
点击 OK,被保留的点即为筛选出的"地面点" 。
你可以将这些点导出为一个新的点云文件 。