《RT-DETR:高效的实时目标检测器》阅读笔记
📌 一、背景与动机
在目标检测领域,非极大值抑制(Non-Maximum Suppression, NMS)长期以来是后处理阶段的关键步骤,用于去除重叠的冗余检测框。然而,NMS 依赖于手工设定的超参数(如置信度阈值、IoU阈值),其执行时间受预测框数量影响显著,且在端到端训练中不可导,限制了模型的整体优化。
近年来,基于Transformer的检测器(如DETR系列)提出了端到端 (end-to-end)的目标检测范式,通过集合预测 (set prediction)机制,完全摒弃了NMS ,实现了更简洁、更可训练的流程。然而,传统DETR类模型通常计算开销大、推理速度慢,难以满足实时检测(real-time)的需求。
本文提出的 RT-DETR (Real-Time DETR)正是为了解决这一矛盾:在保持端到端优势的同时,实现与YOLO等实时检测器相媲美甚至更优的速度与精度。
它通过其高效的混合编码器解耦尺度内交互和跨尺度融合,从而高效地处理多尺度特征。通过采用 IoU 感知查询选择,该模型专注于最相关的对象,从而提高检测精度。其可适应的推理速度通过调整解码器层而无需重新训练来实现,使得 RT-DETR 适用于各种实时对象检测场景。
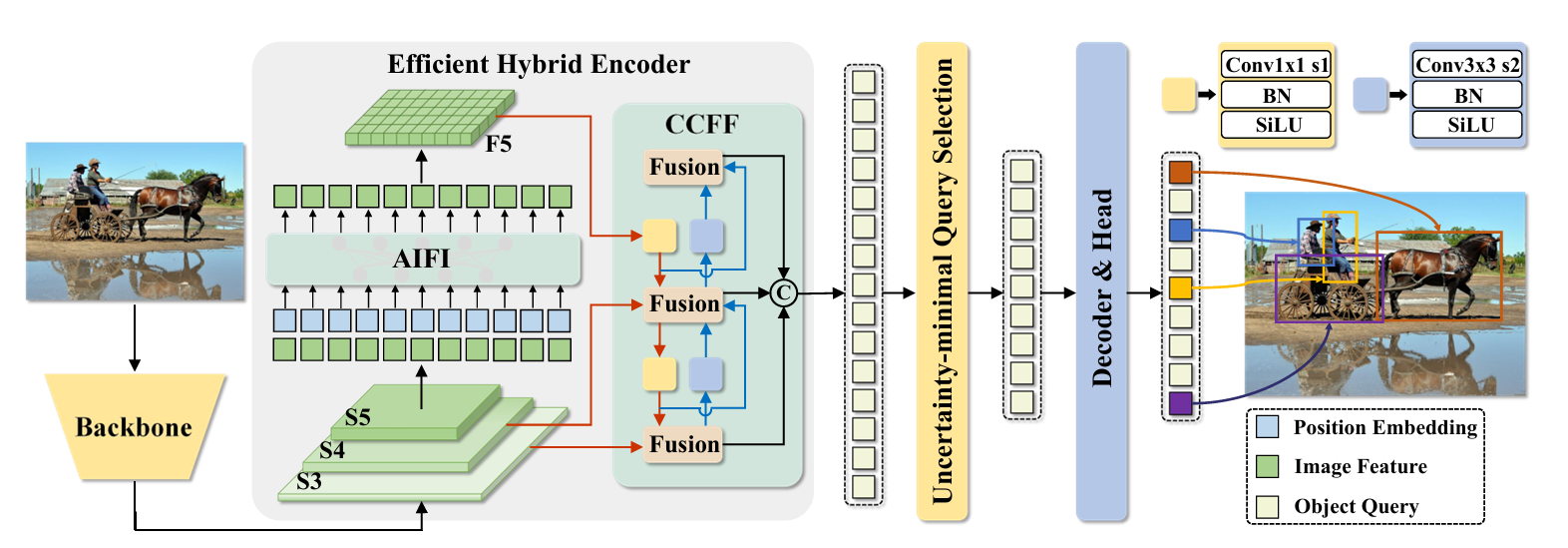
RT-DETR 模型架构图显示了骨干网络的最后三个阶段 {S3, S4, S5} 作为编码器的输入。高效的混合编码器通过尺度内特征交互 (AIFI) 和跨尺度特征融合模块 (CCFM) 将多尺度特征转换为图像特征序列。采用 IoU 感知查询选择来选择固定数量的图像特征,以用作解码器的初始对象查询。最后,带有辅助预测头的解码器迭代地优化对象查询以生成框和置信度分数。
🧩 二、核心思想与技术亮点
RT-DETR 的核心目标是降低计算成本 并优化查询初始化,从而在高分辨率输入下实现高效实时检测。其主要技术贡献包括:
1. 高效混合编码器(Hybrid Encoder)
-
问题:标准DETR使用Transformer编码器处理来自CNN主干网络的多尺度特征图,但其全局注意力机制计算复杂度高,尤其在高分辨率输入下速度极慢。
-
解决方案:引入混合编码器 ,结合了:
- IoU感知的可变形注意力(IoU-aware Deformable Attention):仅关注关键空间位置,大幅减少计算量。
- 跨尺度特征融合(Cross-Scale Feature Fusion):有效整合不同层级的特征信息。
-
优势:在保持高精度的同时,显著提升编码器的计算效率,为实时推理奠定基础。
2. 不确定性最小化的查询选择(Uncertainty-Minimized Query Selection)
- 问题:DETR的解码器依赖一组固定的"对象查询"(object queries),这些查询的初始化质量直接影响检测性能。
- 解决方案 :提出一种新的查询选择机制,通过显式优化查询的不确定性 ,为解码器提供高质量的初始查询。
- 优势:加速模型收敛,提升检测精度,尤其在复杂场景下表现更鲁棒。
3. 真正的端到端实时检测
-
最大亮点 :完全无需NMS后处理。
-
优势:
- 消除了NMS对超参数的敏感性(如论文中图2和表1所示,NMS的执行时间与AP值随置信度/ IoU阈值变化而波动)。
- 实现了检测流程的完全可导,便于端到端优化。
- 推理速度更稳定,不受预测框数量动态变化的影响。
📊 三、实验与性能表现
RT-DETR 在 COCO 数据集上进行了广泛评估,结果表明其性能超越了当时最先进的实时检测器。
| 模型 | Backbone | AP | FPS (T4, FP16) | 是否需NMS |
|---|---|---|---|---|
| YOLOv5 | CSPDarknet | ~50 | 100150 | 是 |
| YOLOv8 | C2f | ~52 | 100150 | 是 |
| RT-DETR-L | ResNet50 | 53.1 | 108 | ❌ 否 |
| RT-DETR-X | ResNet101 | 54.3 | 74 | ❌ 否 |
✅ 结论:
- RT-DETR 在精度上超越YOLOv5/v8。
- 在T4 GPU上,RT-DETR-L 实现了 108 FPS 的实时推理速度,与YOLO系列相当。
- 无需NMS,流程更简洁,部署更稳定。
🖼️ 四、可视化结果分析
论文通过图C和图D展示了RT-DETR在复杂和困难场景下的检测能力:
- 复杂场景 :成功检测密集排列的小物体(如杯子、酒杯、人群),展现了其强大的密集检测能力 。
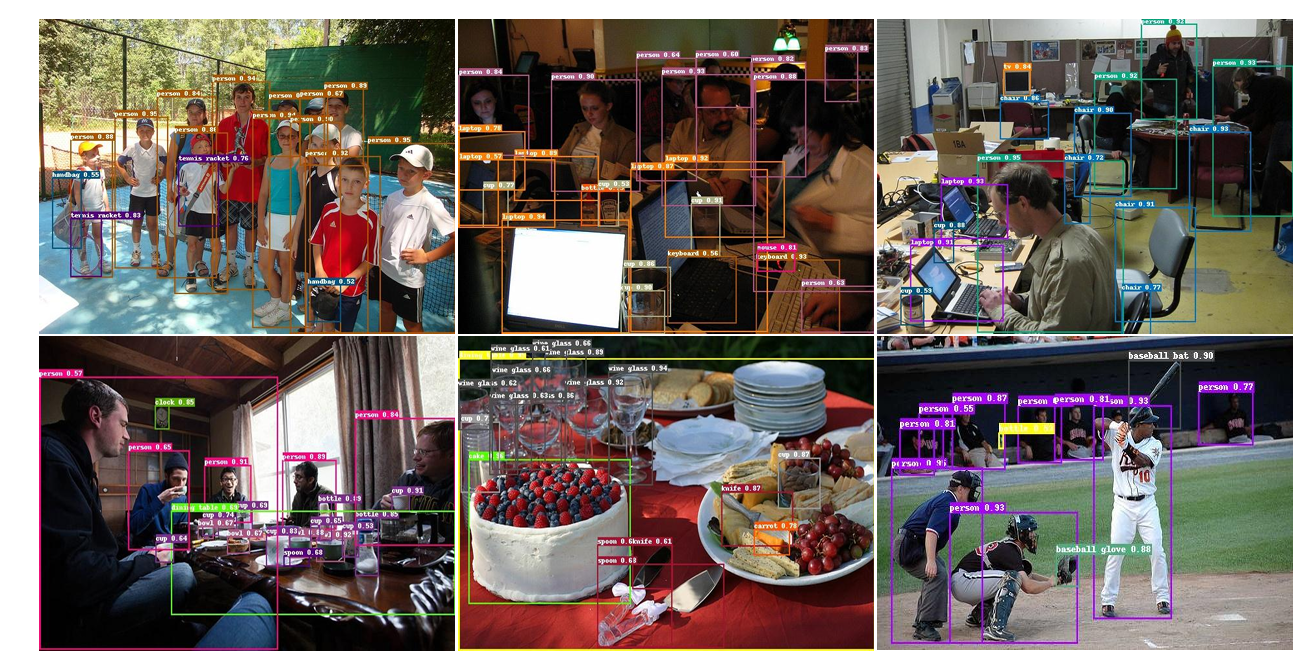
- 困难条件 :在运动模糊 、旋转 和遮挡 等挑战下仍能准确检测目标,证明了其鲁棒性 。
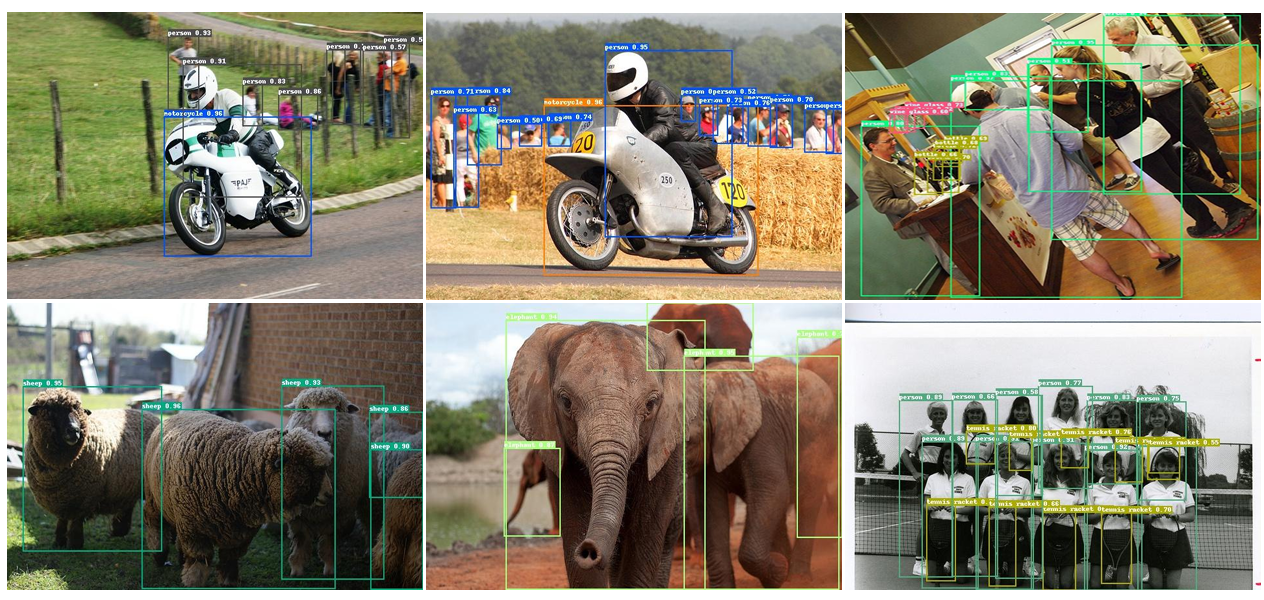
"These predictions substantiate the excellent detection performance of RT-DETR."
------ 这些预测结果证实了RT-DETR卓越的检测性能。
🌟 五、总结与意义
RT-DETR 的出现标志着 Transformer-based 实时检测的一个重要里程碑:
- 打破性能瓶颈 :证明了端到端DETR架构同样可以实现实时推理。
- 简化检测流程 :彻底摆脱NMS,实现真正端到端的目标检测。
- 高精度与高鲁棒性:在复杂和困难场景下表现出色。
- 灵活的模型尺度:提供从S到X的多种尺寸,适应不同硬件和速度需求。
📢 未来影响:RT-DETR 为实时目标检测提供了新的技术范式,推动了DETR系列模型在工业界的应用落地。
🔗 参考资料
- 论文链接 :arXiv:2304.08069
- 相关工作:DETR, Deformable DETR, Sparse R-CNN, YOLO系列