轮廓近似(cv2.approxPolyDP)详解
系统性地讲清楚 什么是轮廓近似、背后的算法逻辑、各参数的含义、epsilon 如何选、代码每行在做什么、常见坑与调参思路。
1)一眼看懂:轮廓近似在做什么?
轮廓近似(Polygonal Approximation) 的目标是:
用更少的顶点 ,在误差不超过阈值 epsilon 的前提下,逼近原始轮廓曲线。它能把"密密麻麻的轮廓点"简化成"折线/多边形的关键拐点",从而:
-
更便于形状理解(比如三角形、矩形、五边形......);
-
降低运算复杂度(点少了,后续判断更快);
-
提升鲁棒性(小毛刺、小噪声被平滑掉)。
2)核心算法直觉:Ramer--Douglas--Peucker(RDP)
OpenCV 的 approxPolyDP 使用的是经典的 RDP 算法。它的思想可以用一句话描述:
用一根直线把轮廓的首尾连起来,找出"偏离这根直线最远的点 ";
如果这最远距离 ≤
epsilon,则"这根直线"就足够代表中间所有点;否则把轮廓在"最远点"处一分为二,递归对两段重复上述过程。
-
误差度量 :点到线段的最短欧氏距离。
-
递归终止 :所有子段内的"最远点距离"都 ≤
epsilon。 -
结果:保留下来的"拐点/端点"集合,就是近似后的多边形顶点序列。
直观理解:给曲线上下各画一条"±epsilon 的走廊",如果曲线始终在走廊内,就用一条直线代替;一旦冲出,就在冲出的地方"加一个顶点"再细化。
3)approxPolyDP 的参数与返回值,逐一吃透
approx = cv2.approxPolyDP(curve, epsilon, closed)-
curve:输入轮廓,一般来自findContours的某个元素,比如contours[i]。
形状 通常是(N, 1, 2)的ndarray,含N个点,每点是(x, y)。 -
epsilon:近似精度(像素单位)。这是整个函数的"灵魂参数"。-
它是"允许的最大几何偏差(最大欧氏距离)"。
-
越小 :保留点越多、越贴近 原始轮廓;
越大 :点越少、越粗略,甚至把复杂形状"拉直"成几条线。 -
你在代码里将
epsilon设为"一定比例 × 周长"(见下节),这是非常实用的尺度自适应方式。
-
-
closed:布尔值,轮廓是否封闭。-
True:输入曲线被看作首尾相连的闭合轮廓; -
False:当作折线段处理。闭合与否会影响"首尾连线"的判断与误差度量,从而影响最终拐点。
-
-
返回值
approx:近似后的轮廓,形状同样是(M, 1, 2),其中M ≤ N。也就是保留下来的"关键顶点坐标"。
4)为什么常用 epsilon = α × arcLength(contour, True)?
你在两段代码里分别用了:
-
epsilon = 0.01 * cv2.arcLength(contours[0], True) -
epsilon = 0.005 * cv2.arcLength(contours[1], True)
这是非常实战的套路,因为:
-
epsilon的单位是像素(绝对量)。同一张图里,物体大则需要更大的绝对误差、物体小则需要更小的绝对误差。 -
用周长
arcLength的比例 来设置epsilon,相当于做了尺度归一化 :物体越大,epsilon随之按比例变大;物体越小,epsilon也按比例变小。 -
经验上:
-
0.5% ~ 1%:保形较好,细节完整,点数较多;
-
1% ~ 3%:常用区间,适合大多数"形状识别"的近似;
-
>5%:强力简化(对噪声也很"宽容"),适合轮廓很规整、你只要粗略形状的任务。
-
5)与 findContours、CHAIN_APPROX_* 的关系
你的两段代码都用 cv2.findContours(..., cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) 拿到原始轮廓,其中:
-
RETR_TREE:构建完整的层级结构(父子、同级关系)。适合有"洞/内外轮廓"的对象(比如花瓣内部的小空洞)。 -
CHAIN_APPROX_NONE:保留轮廓上的每个点 。这会让原始
contour的点很多(例如(N, 1, 2)中N非常大),随后用approxPolyDP来做统一的几何简化 。若选择
CHAIN_APPROX_SIMPLE,直线段上的中间点会先被压缩掉,N会更小,再近似的空间也更有限。
小贴士:
findContours会修改输入图像 ,所以通常对阈值图的拷贝调用,或者像你这样直接对阈值图用也行,只是后面别再指望那张二值图还保持原样。
6)示例代码
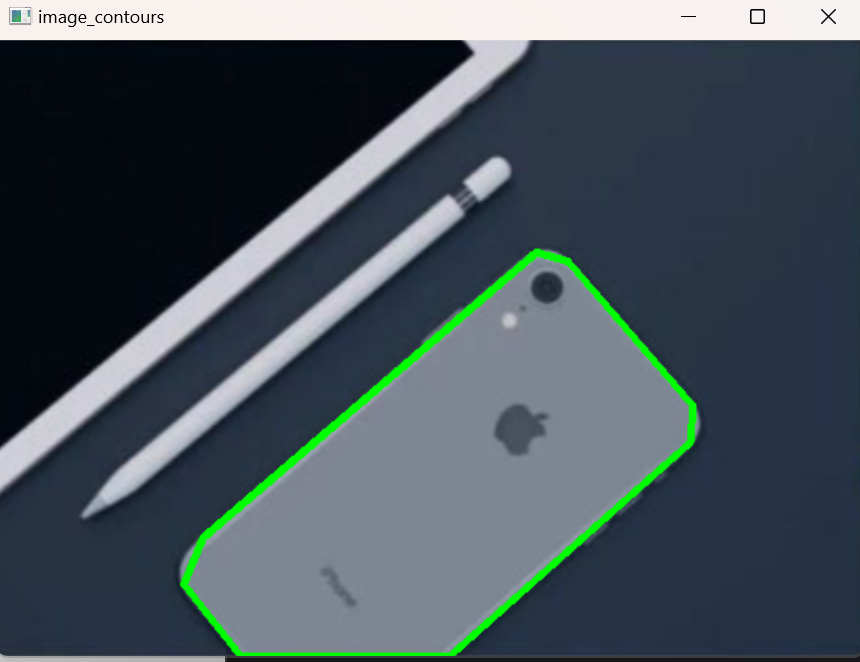
A. phone.png 示例

import cv2
phone = cv2.imread('phone.png')
phone_gray = cv2.cvtColor(phone,cv2.COLOR_BGR2GRAY) # 转灰度
ret,phone_thresh = cv2.threshold(phone_gray, 120, 255, cv2.THRESH_BINARY) # 二值化
contours = cv2.findContours(phone_thresh,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)[-2]-
通过固定阈值
120将手机轮廓"抠"出来。 -
contours是列表 ,每个元素是一个(N, 1, 2)的轮廓点集。注意:
contours[0]并不保证是"最大轮廓" ,只是扫描顺序中的第一个。有时它可能是背景边缘、某个小部件等。这里直接取[0],在这张图里是手机的主外轮廓,但通用写法里通常会根据cv2.contourArea或层级信息来挑选。epsilon = 0.01 * cv2.arcLength(contours[0], closed= True)
approx = cv2.approxPolyDP(contours[0], epsilon, closed= True)
print(contours[0].shape) # 形如 (N,1,2)
print(approx.shape) # 形如 (M,1,2),M << N -
这里
epsilon取 1% 周长,属于"保形较好但有一定简化"的常用选择。 -
approx的顶点数会明显少于contours[0],如果手机轮廓比较规整,最终顶点数可能接近矩形的 4 个(若椭圆/圆角较多,则略多于 4)。phone_new = phone.copy()
image_contours = cv2.drawContours(phone_new, [approx],contourIdx=-1,color=(0,255,0),thickness=3)#绘制轮廓
cv2.imshow('phone',phone)
cv2.waitKey(0)
cv2.imshow('image_contours',image_contours)
cv2.waitKey(0) -
drawContours的第二个参数 要传"轮廓列表 "。你这里传[*approx*](列表套一个近似轮廓),这是规范写法。 -
contourIdx=-1表示画列表中的全部轮廓(此处就一个)。 -
绿色粗线能直观看到"近似多边形"的样子。
运行时打印的
(N,1,2)与(M,1,2)能直观看到"压点效果"。例如N=2000,M=8之类,这表示算法把 2000 个密集点浓缩成 8 个多边形顶点。
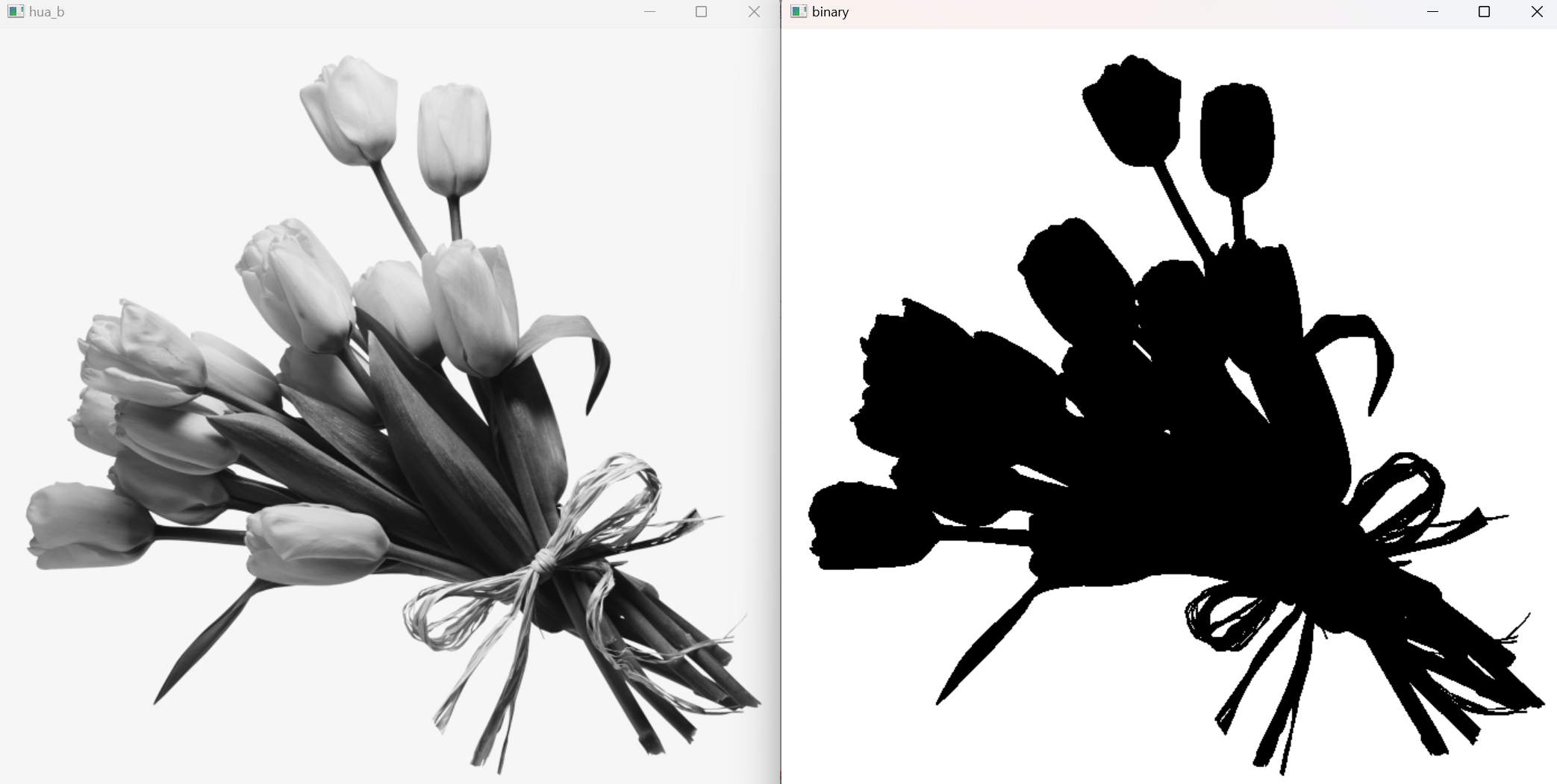
B. hua.png 示例

import cv2
hua = cv2.imread('hua.png')#读取原图
hua_gray = cv2.cvtColor(hua,cv2.COLOR_BGR2GRAY)#灰度图的处理
cv2.imshow('hua_b',hua_gray)
cv2.waitKey(0)
# hua_gray=cv2.imread('hua.png',0) #读取灰度图
ret, hua_binary = cv2.threshold(hua_gray,240,255, cv2.THRESH_BINARY)#阈值处理为二值
cv2.imshow('binary',hua_binary)
cv2.waitKey(0)
# _,contours, hierarchy = cv2.findContours(hua_binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
contours = cv2.findContours(hua_binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)[-2] # 通用-
阈值设为 240 很高,适合把**很亮的区域(花瓣/白色)**抠出来,但对光照不均的图像,可能会导致边界断裂或漏检。
-
使用
RETR_TREE可以拿到"花朵外轮廓 + 内部洞/细节"的层次结构,后续如果需要筛选特定层(外轮廓 vs 内轮廓),要结合hierarchy使用。
image_copy = hua.copy()
cv2.drawContours(image=image_copy, contours=contours[1], contourIdx=-1,color=(0,0,255),thickness=2)
cv2.imshow('Contours_show', image_copy)
cv2.waitKey(0)-
这里给出一个兼容性提醒 :
drawContours的contours期望一个"列表" ,如contours=[contours[1]];你传的是单个
ndarray(contours[1]),在一些 OpenCV 版本中也许能画 ,但在另一些版本里可能报错或行为不一致。你的下一次调用已使用
[approx]这种稳妥写法;如果你发现这一行在某些环境报错,可将它也包成列表(这里我不改你的代码,只说明风险点)。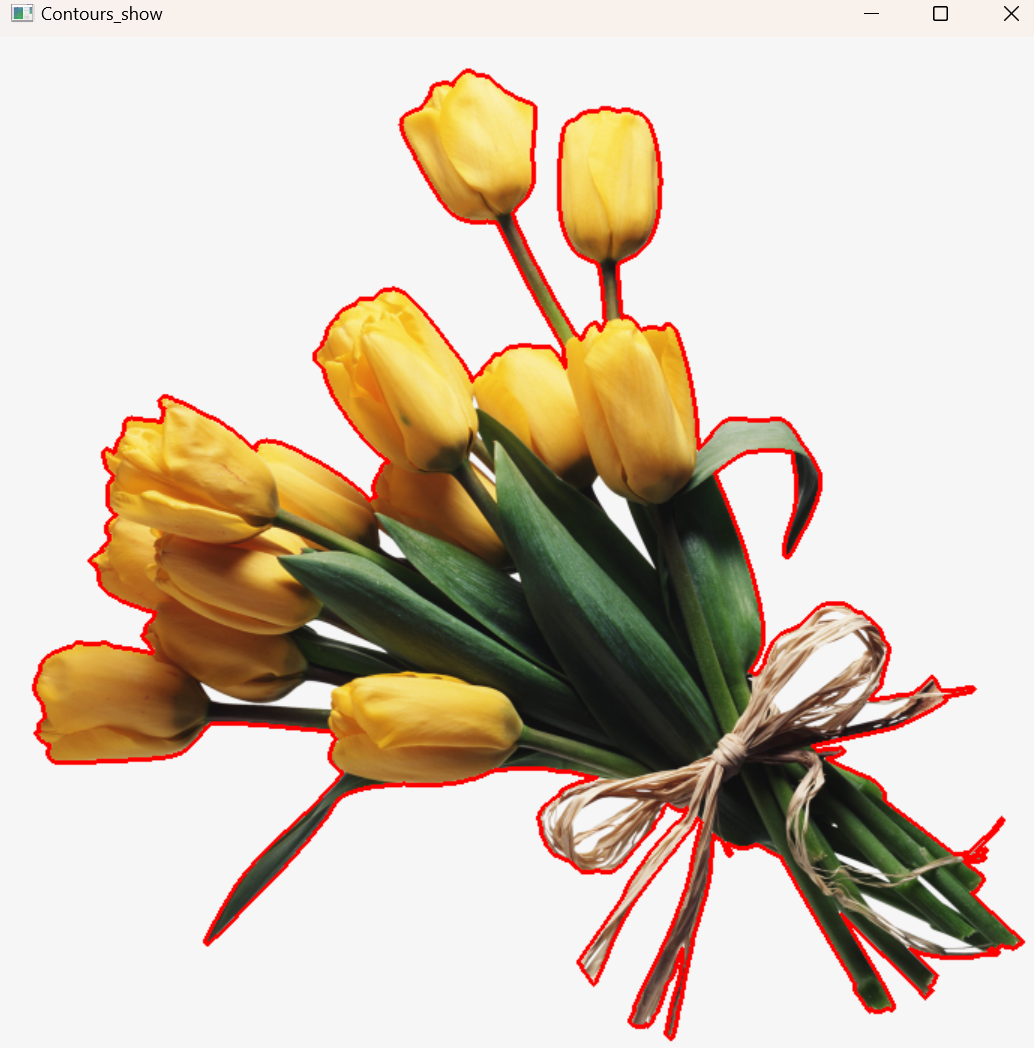
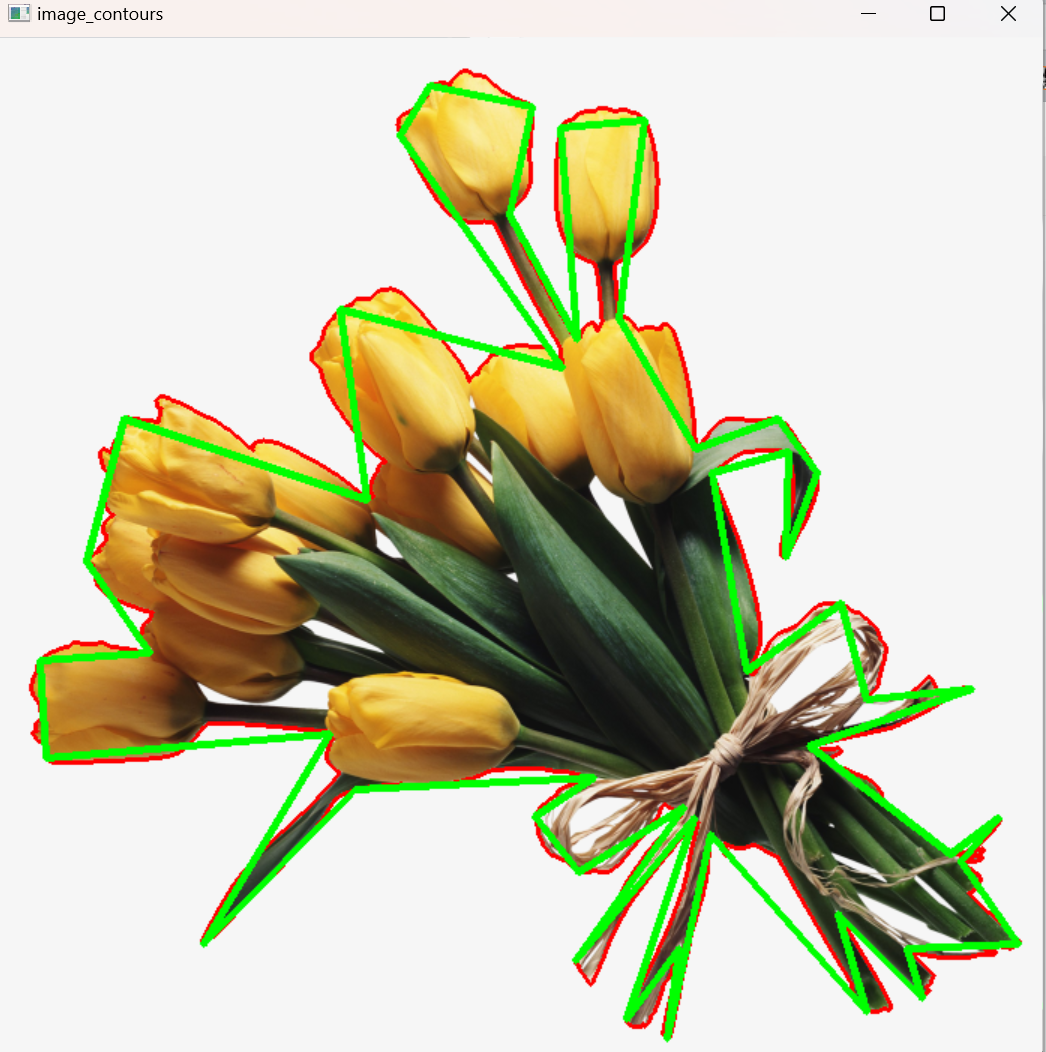
epsilon = 0.005 * cv2.arcLength(contours[1], closed= True) #设置近似精度 【h要<ε;ε越小,点越多,越精确】
approx = cv2.approxPolyDP(contours[1], epsilon, closed= True) #对轮廓进行近似
print("原始轮廓点数:", contours[1].shape)
print("近似轮廓点数:", approx.shape)
hua_new = hua.copy()
image_contours = cv2.drawContours(image_copy, [approx],contourIdx=-1,color=(0,255,0),thickness=3)#绘制轮廓
cv2.imshow('image_contours',image_contours)
cv2.waitKey(0) -
这里
epsilon取 0.5% 周长 ,比手机示例更"紧",因为花瓣边缘往往更细腻复杂,想尽量保留更多形状细节。 -
画出来的绿色轮廓应该比红色原轮廓更"干净",点更少,但保持花瓣的大致形状。
7)epsilon 的调参方法与经验区间
-
先相对、后微调 :先取
epsilon = α × arcLength(contour),再在α ∈ [0.003, 0.02]的区间内试探。- 目标是"尽量少的点 + 形状不走样"。
-
看任务:
-
形状识别/顶点计数(如判定三角形/矩形) :
α可取 1%~3%,让噪声被吸收,保持边角清晰。 -
需要保留细腻轮廓细节(自然物体、曲线) :
α取 0.3%~1%。 -
粗略外接形体、只要大轮廓趋势 :
α取 >3% ,甚至 5%~10%。
-
-
尺度影响 :
epsilon是像素单位,图像缩放会直接影响"绝对误差"。用周长归一能抵消这点,但极端缩放 时仍建议重新评估α。
8)与相近概念/算子区别(别混淆)
-
approxPolyDP:用多边形顶点近似 原轮廓,保形为主,允许曲线被"折线化"。 -
凸包
cv2.convexHull:得到最小凸多边形 包住轮廓,会抹掉凹陷(比如星形被"鼓起来")。 -
最小外接矩形
cv2.minAreaRect:找一个面积最小的旋转矩形包住目标;只有 4 个角,信息压缩极强。 -
外接圆/椭圆:拟合一个圆/椭圆;更强的形状假设,形状表达单一。
-
CHAIN_APPROX_SIMPLE(在findContours阶段)与approxPolyDP(事后多边形近似)不可等价:前者只是把直线段上的冗余点 去掉,后者是几何近似,会综合考虑曲率变化。
9)质量与稳健性:前处理 & 版本差异 & 轮廓顺序
-
前处理 影响巨大:二值化阈值过高/过低都会破坏轮廓;
适当的 去噪(如中值滤波)、形态学闭运算 能让轮廓更连贯,从而近似更稳定。
-
OpenCV 版本差异 :
findContours在不同版本里返回(image, contours, hierarchy)或(contours, hierarchy);你用的
[-2]取法能兼容不同版本(稳妥)。 -
contours的顺序不等于大小顺序 :不要理所当然地把contours[0]当最大轮廓。需要时应结合cv2.contourArea或hierarchy进行筛选(比如只取外层、忽略洞等)。
10)常见"坑位"清单
-
epsilon太小点几乎不减,近似意义不大;时间也照样花,甚至更久。
-
epsilon太大关键拐点被吃掉,矩形被"拉直"成三角形,形状判别失败。
-
closed标志不当封闭轮廓却用
False,或开放轮廓却用True,会影响"首尾连线"的误差统计,导致顶点异常。 -
传错
drawContours的参数类型第二个参数应为列表 (如
[approx]),不同版本的 OpenCV 对"直接传单个ndarray"的容忍度不同。 -
误把轮廓顺序当语义顺序
contours[i]的索引只是扫描顺序,跟"外层/内层""大小""位置"没有必然关系。 -
二值化/边缘裂缝
轮廓断裂会让近似结果"漏点、缺角"。可在阈值前先平滑,或阈值后做形态学闭运算。
11)怎么用近似结果做"形状识别"?
-
数顶点 :
len(approx)即多边形的顶点数。-
3≈三角形,4≈四边形,5≈五边形...... -
对四边形再看角度是否接近 90° 来区分矩形/菱形。
-
-
面积一致性 :比较
cv2.contourArea(approx)与cv2.contourArea(contour)的比值(应当接近 1)。 -
周长一致性 :比较
arcLength的比值;若差距过大,说明简化过头或轮廓不规整。
这些后处理都直接基于你当前代码的输出 (
approx),无需改动你的流程。
12)原始轮廓和近似轮廓、epsilon
-
print(shape):-
原始轮廓:形如
(N,1,2),N很大; -
近似轮廓:形如
(M,1,2),M明显变小(矩形场景下接近 4)。
-
-
可视化窗口:
-
phone:绿色粗线会勾出简化后的"手机外形多边形"; -
hua:绿色粗线会显示简化后的花瓣轮廓;红色(若成功绘制)是原轮廓对照。
-
-
epsilon不同带来的对比:0.01×周长(手机) vs0.005×周长(花):后者更"贴边"、保留细节更多。
总结一句话 :
approxPolyDP 用 epsilon 这把"精度刻刀",在"保留形状特征"和"减少点数噪声"之间做权衡。你当前两段代码是非常标准的用法:先阈值出轮廓 → 用 RETR_TREE 和 CHAIN_APPROX_NONE 获得完整点集 → 用 epsilon = 周长比例 做尺度自适应近似 → 可视化比较原始与近似的点数与形状。后续无论是做形状分类、关键点提取,还是外接几何体拟合,都能在这个"简化后的轮廓"上更稳定地进行。