2025年,人工智能技术在计算机视觉和数据库领域持续突破,YOLOv8的目标检测精度与速度再创新高,而电科金仓的AI与数据融合方案正悄然改变企业级应用的面貌。
在当今快速发展的计算机视觉领域,YOLO(You Only Look Once)系列算法作为热门的目标检测框架,一直占据着行业领先地位。2025年,YOLOv8的推出更是带来了三项显著的技术突破:处理速度提升20%、模型体积缩小30%、平均准确率提升5-10%。
与此同时,AI与数据库的融合也成为2025数博会的焦点,电科金仓展示的AI与数据融合新成果,为企业级应用提供了全新的解决方案。
本文将深入浅出地解析YOLOv8的性能评估指标,并结合电科金仓2025年的最新发布,探讨AI技术在现实应用中的巨大潜力。
1. YOLOv8:目标检测的技术革新
YOLOv8是YOLO系列的最新版本,它在对象检测、实例分割和对象跟踪等多个领域实现了更高的精度和性能。相比于前代产品,YOLOv8不仅在检测速度上提升了20%,模型体积减小了30%,在平均准确率(mAP)上也有了5%到10%的提升。
1.1 YOLOv8的核心改进
YOLOv8的基础结构采用了最新的卷积神经网络(CNN)架构,使其特征提取能力得到显著增强。同时,YOLOv8引入了量化和剪枝技术,支持FP16和INT8推理模式,显著减少了内存占用与推理时间。
这些改进使得YOLOv8能够在高达60 FPS的帧率下处理1080p分辨率的视频流,确保实时处理的需求得到满足。对于需要高性能目标检测的应用场景(如自动驾驶、视频监控等),这无疑是一个重大的飞跃。
2. YOLOv8性能评估指标详解
要全面评估YOLOv8模型的性能,需要使用多种指标进行综合评估。以下是YOLOv8常用的性能评估指标:
2.1 mAP(Mean Average Precision)
mAP是目标检测领域最常用的评价指标之一,它衡量了模型在所有目标类别上的平均精度。计算mAP的步骤如下:
-
对于每个目标类别,计算每个IoU阈值下的精度和召回率曲线
-
计算每个精度和召回率曲线的平均精度(AP)
-
计算所有类别AP的平均值,得到mAP
```python
计算mAP的简化示例代码
def calculate_map(predictions, ground_truths, iou_threshold=0.5):
"""
计算平均精度均值(mAP)
参数:
predictions: 模型预测框列表,格式为x1, y1, x2, y2, confidence, class_id
ground_truths: 真实框列表,格式为x1, y1, x2, y2, class_id
iou_threshold: IoU阈值,默认为0.5
返回:
mAP值
"""
按类别分组处理
classes = set(gt\[4 for gt in ground_truths])
aps = \[\]
for class_id in classes:
获取当前类别的预测和真实框
class_preds = p for p in predictions if p\[5 == class_id]
class_gts = gt for gt in ground_truths if gt\[4 == class_id]
计算当前类别的AP
ap = calculate_ap(class_preds, class_gts, iou_threshold)
aps.append(ap)
计算所有类别的平均值(mAP)
mean_ap = sum(aps) / len(aps) if aps else 0
return mean_ap
def calculate_ap(predictions, ground_truths, iou_threshold):
"""
计算单个类别的平均精度(AP)
"""
按照置信度降序排列预测框
predictions.sort(key=lambda x: x4, reverse=True)
初始化变量
tp = np.zeros(len(predictions)) # 真阳性
fp = np.zeros(len(predictions)) # 假阳性
gt_matched = np.zeros(len(ground_truths)) # 记录真实框是否已匹配
遍历每个预测框
for i, pred in enumerate(predictions):
找到与当前预测框最匹配的真实框
best_iou = 0
best_gt_idx = -1
for j, gt in enumerate(ground_truths):
if gt_matchedj:
continue
iou = calculate_iou(pred:4, gt:4)
if iou > best_iou:
best_iou = iou
best_gt_idx = j
根据IoU阈值判断是否匹配成功
if best_iou >= iou_threshold:
gt_matchedbest_gt_idx = 1
tpi = 1
else:
fpi = 1
计算精度和召回率曲线
tp_cumsum = np.cumsum(tp)
fp_cumsum = np.cumsum(fp)
recalls = tp_cumsum / len(ground_truths)
precisions = tp_cumsum / (tp_cumsum + fp_cumsum + 1e-10)
计算平均精度(AP),使用11点插值法
ap = 0
for t in np.arange(0, 1.1, 0.1):
if np.sum(recalls >= t) == 0:
p = 0
else:
p = np.max(precisionsrecalls \>= t)
ap += p / 11
return ap
```
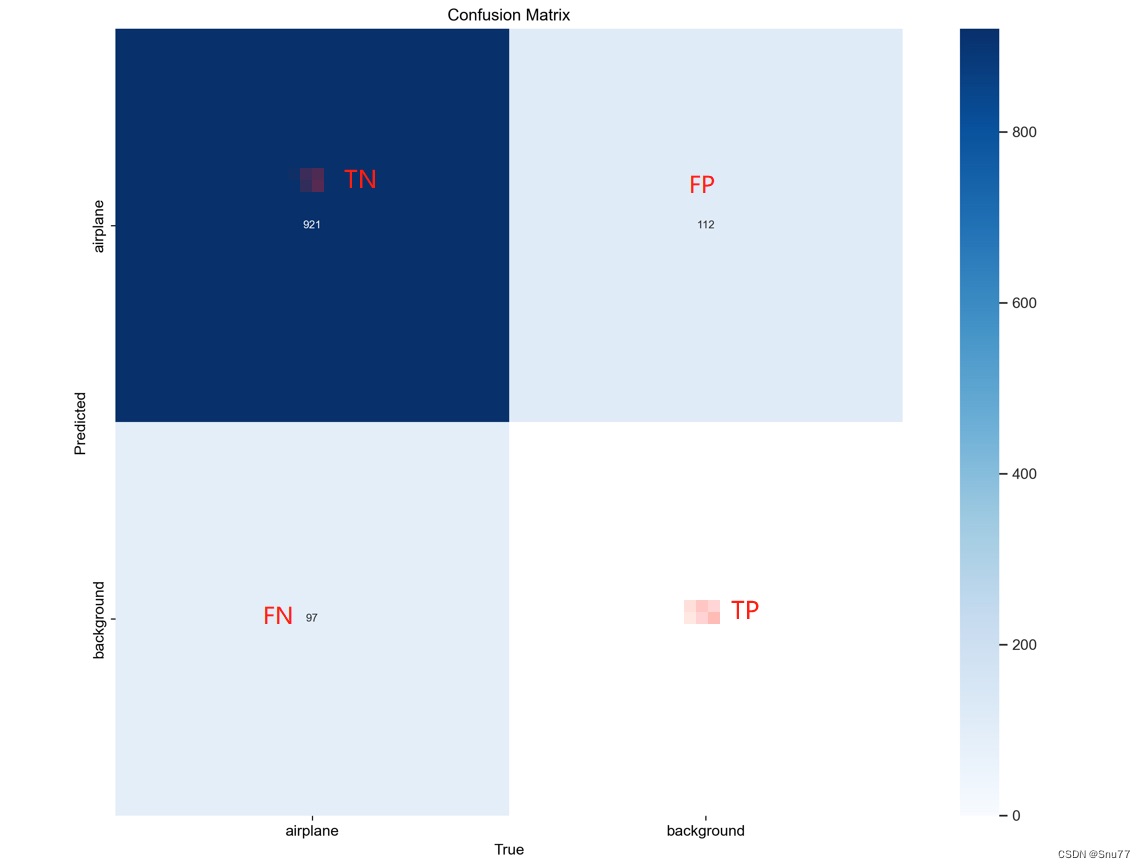
2.2 Precision(精确度)和Recall(召回率)
精确度和召回率是评估目标检测模型性能的基本指标:
-
**精确度**:正确预测为正样本的比例,计算公式为:Precision = TP / (TP + FP)
-
**召回率**:所有正样本中被正确预测为正样本的比例,计算公式为:Recall = TP / (TP + FN)
其中,TP(True Positive)表示真阳性,FP(False Positive)表示假阳性,FN(False Negative)表示假阴性。
```python
计算精确度和召回率的示例代码
def calculate_precision_recall(predictions, ground_truths, iou_threshold=0.5):
"""
计算精确度和召回率
参数:
predictions: 模型预测框列表
ground_truths: 真实框列表
iou_threshold: IoU阈值,默认为0.5
返回:
precision: 精确度
recall: 召回率
"""
统计TP、FP、FN
tp = 0
fp = 0
fn = len(ground_truths)
记录每个真实框是否被匹配
gt_matched = np.zeros(len(ground_truths))
for pred in predictions:
找到与当前预测框最匹配的真实框
best_iou = 0
best_gt_idx = -1
for j, gt in enumerate(ground_truths):
if gt_matchedj:
continue
iou = calculate_iou(pred:4, gt:4)
if iou > best_iou:
best_iou = iou
best_gt_idx = j
根据IoU阈值判断是否匹配成功
if best_iou >= iou_threshold:
gt_matchedbest_gt_idx = 1
tp += 1
fn -= 1
else:
fp += 1
计算精确度和召回率
precision = tp / (tp + fp) if (tp + fp) > 0 else 0
recall = tp / (tp + fn) if (tp + fn) > 0 else 0
return precision, recall
```
2.3 FPS(Frames Per Second)
FPS表示每秒处理的帧数,反映模型的推理速度。对于实时应用(如自动驾驶、视频监控等),FPS是至关重要的指标。YOLOv8在推理速度上有着显著提高,能够在高达60 FPS的帧率下处理1080p分辨率的视频流。
```python
计算FPS的示例代码
import time
class FPSCalculator:
def init(self, window_size=30):
"""
初始化FPS计算器
参数:
window_size: 滑动窗口大小,用于平滑FPS计算
"""
self.times = \[\]
self.window_size = window_size
def update(self):
"""
更新时间记录
"""
self.times.append(time.time())
if len(self.times) > self.window_size:
self.times.pop(0)
def get_fps(self):
"""
计算FPS值
"""
if len(self.times) <= 1:
return 0
time_diff = self.times-1 - self.times0
if time_diff == 0:
return 0
return (len(self.times) - 1) / time_diff
使用示例
fps_calculator = FPSCalculator()
在视频处理循环中
for frame in video_stream:
处理帧
process_frame(frame)
更新FPS计算
fps_calculator.update()
获取当前FPS
current_fps = fps_calculator.get_fps()
print(f"当前FPS: {current_fps:.2f}")
```
 ### 2.4 IoU(Intersection over Union)
### 2.4 IoU(Intersection over Union)
IoU是交并比的缩写,用于衡量预测框与真实框的重叠程度。它是目标检测中最基本的评估指标之一,常用于判断预测框是否正确匹配了真实框。
```python
计算IoU的示例代码
def calculate_iou(box1, box2):
"""
计算两个边界框的IoU(交并比)
参数:
box1: 第一个边界框,格式为x1, y1, x2, y2
box2: 第二个边界框,格式为x1, y1, x2, y2
返回:
iou: 交并比值
"""
计算交集区域的坐标
x1_inter = max(box10, box20)
y1_inter = max(box11, box21)
x2_inter = min(box12, box22)
y2_inter = min(box13, box23)
计算交集区域面积
inter_area = max(0, x2_inter - x1_inter) * max(0, y2_inter - y1_inter)
计算两个边界框各自的面积
box1_area = (box12 - box10) * (box13 - box11)
box2_area = (box22 - box20) * (box23 - box21)
计算并集区域面积
union_area = box1_area + box2_area - inter_area
计算IoU
iou = inter_area / union_area if union_area > 0 else 0
return iou
使用示例
box_a = 10, 10, 50, 50 # 格式: x1, y1, x2, y2
box_b = 30, 30, 70, 70
iou_value = calculate_iou(box_a, box_b)
print(f"IoU值: {iou_value:.2f}")
```
3. 电科金仓2025:AI与数据融合的新成果
在2025年中国国际大数据产业博览会上,电科金仓展示了其新一代数据库系列产品矩阵和行业解决方案,重点突出了人工智能与数据库技术的深度融合。
3.1 金仓数据库一体机KXData
金仓数据库一体机KXData通过**软硬一体、开箱即用**的设计,将复杂的硬件集成与调优封装于系统内部,突破了性能、成本与运维之间的"不可能三角",使总体拥有成本降低40%以上。
KXData搭载的"的卢运维智能体",实现了自治运维、性能自调优与告警自动处置闭环,故障预警准确率超98%。这款产品细分为三个型号以满足不同用户需求:
-
**KXData-A**:高性能数据库一体机
-
**KXData-M**:云数据库一体机
-
**KXData-S**:单机数据库一体机
3.2 KES V9:AI时代的融合数据库
电科金仓推出的KES V9是一款结合AI技术的**新一代融合数据库**产品,它具备以下创新特性:
-
**多语法一体化兼容框架**:支持多种数据库语法,简化迁移过程
-
**多模数据一体化存储**:能够同时处理结构化、半结构化和非结构化数据
-
**集中分布一体化架构**:兼顾集中式和分布式架构的优势
```sql
-- KES V9 AI功能的SQL示例
-- 1. 智能查询优化
SELECT AI_OPTIMIZE('
SELECT p.name, c.category_name, p.price
FROM products p
JOIN categories c ON p.category_id = c.id
WHERE p.price > 100
ORDER BY p.create_time DESC
');
 -- 2. 预测性查询
-- 2. 预测性查询
SELECT product_id,
PREDICT_SALES(product_id, 30) as predicted_sales,
AI_ANALYZE('inventory_risk', product_id) as inventory_risk
FROM products
WHERE AI_PREDICT('stockout_probability', product_id) > 0.8;
-- 3. 自动故障预警
SET AI_MONITORING = ON;
SET AI_ALERT_THRESHOLD = 0.95;
CREATE AI RULE slow_query_alert
WHEN QUERY_TIME > 5000
THEN EXECUTE AI_ACTION('send_alert', 'Slow query detected');
```
3.3 人工智能与数据库的双向赋能
电科金仓通过一系列创新实践推动人工智能与数据库的深度融合,实现双向赋能:
-
**智能运维**:产品内置AI运维开发模块,可实现智能资源调度、根因分析、故障预警、SQL优化等,显著降低运维复杂度与人力成本
-
**向量数据处理**:凭借卓越的向量数据处理能力和多模型混合查询能力,金仓数据库可更好地支撑AI大模型在实际业务中的应用
-
**多行业应用**:金仓数据库已在政务、能源、电信、金融、交通、医疗等多个领域得到实际应用,助力企业数字化转型
4. 技术融合与创新应用
YOLOv8的性能评估指标与电科金仓的数据库技术看似属于不同领域,但实际上它们都代表了AI技术发展的一个重要趋势------**专业化与集成化**。
 ### 4.1 AI技术与垂直行业的深度融合
### 4.1 AI技术与垂直行业的深度融合
2025年,我们看到AI技术正在从通用化向专业化发展,针对特定领域进行深度优化:
```python
YOLOv8与数据库技术结合的示例应用
实时视频分析系统,将识别结果存入数据库
import cv2
from ultralytics import YOLO
import pandas as pd
from sqlalchemy import create_engine
class VideoAnalyzer:
def init(self, model_path, db_connection):
"""
初始化视频分析器
参数:
model_path: YOLOv8模型路径
db_connection: 数据库连接字符串
"""
加载YOLOv8模型
self.model = YOLO(model_path)
创建数据库连接
self.engine = create_engine(db_connection)
创建FPS计算器
self.fps_calculator = FPSCalculator()
def analyze_video(self, video_path, output_path=None, conf_threshold=0.5):
"""
分析视频并保存结果到数据库
参数:
video_path: 视频路径
output_path: 输出视频路径(可选)
conf_threshold: 置信度阈值
"""
打开视频文件
cap = cv2.VideoCapture(video_path)
获取视频信息
width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = cap.get(cv2.CAP_PROP_FPS)
准备视频输出(如果需要)
if output_path:
fourcc = cv2.VideoWriter_fourcc(*'mp4v')
out = cv2.VideoWriter(output_path, fourcc, fps, (width, height))
frame_count = 0
detection_results = \[\]
while True:
ret, frame = cap.read()
if not ret:
break
使用YOLOv8进行目标检测
results = self.model(frame, conf=conf_threshold)
处理检测结果
for result in results:
boxes = result.boxes
for box in boxes:
提取检测信息
x1, y1, x2, y2 = box.xyxy0.cpu().numpy()
conf = box.conf0.cpu().numpy()
cls_id = int(box.cls0.cpu().numpy())
cls_name = result.namescls_id
记录检测结果
detection_results.append({
'frame_id': frame_count,
'class_id': cls_id,
'class_name': cls_name,
'confidence': float(conf),
'x1': float(x1),
'y1': float(y1),
'x2': float(x2),
'y2': float(y2),
'timestamp': frame_count / fps
})
在帧上绘制检测框(如果需要输出视频)
if output_path:
label = f"{cls_name} {conf:.2f}"
cv2.rectangle(frame, (int(x1), int(y1)), (int(x2), int(y2)), (0, 255, 0), 2)
cv2.putText(frame, label, (int(x1), int(y1)-10),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
写入输出视频(如果需要)
if output_path:
out.write(frame)
更新FPS计算
self.fps_calculator.update()
current_fps = self.fps_calculator.get_fps()
显示实时结果(可选)
cv2.imshow('Frame', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
frame_count += 1
释放资源
cap.release()
if output_path:
out.release()
cv2.destroyAllWindows()
将检测结果保存到数据库
if detection_results:
df = pd.DataFrame(detection_results)
df.to_sql('video_detections', self.engine, if_exists='append', index=False)
return detection_results
使用示例
analyzer = VideoAnalyzer('yolov8n.pt', 'postgresql://user:password@localhost:5432/video_analysis')
results = analyzer.analyze_video('input_video.mp4', 'output_video.mp4')
```
4.2 未来趋势:AI原生数据库与边缘计算的结合
随着YOLOv8等高效算法的发展,以及电科金仓KES V9等AI原生数据库的成熟,我们正看到一个新的趋势------**AI计算将更加靠近数据源,并与数据库系统深度集成**。
这种架构带来以下优势:
-
**实时性**:在数据产生的地方直接进行处理,减少数据传输延迟
-
**隐私保护**:敏感数据无需上传到云端,在本地即可完成处理
-
**成本效益**:减少云端计算和传输成本,特别适合大规模应用
-
**可扩展性**:边缘节点可以分布式部署,更容易实现水平扩展
5. 总结
2025年是AI技术在各行各业深度融合的关键一年。YOLOv8通过三项技术突破------处理速度提升20%、模型体积缩小30%、平均准确率提升5-10%------继续在目标检测领域保持领先地位。
同时,电科金仓的AI与数据融合方案展示了数据库技术的新方向------**智能化、自适应、高效率**。金仓数据库一体机KXData使总体拥有成本降低40%以上,故障预警准确率超98%。
通过本文的讲解,我们希望读者能更好地理解YOLOv8的性能评估指标(mAP、Precision、Recall、FPS、IoU),以及电科金仓2025年发布的新技术如何推动AI与数据库的深度融合。
随着技术的不断发展,我们相信YOLOv8和电科金仓的技术将在更多领域得到应用,为自动驾驶、智能监控、智能制造等行业带来新的变革机遇。
**你对YOLOv8和电科金仓的技术有什么看法?欢迎在评论区分享你的想法和经验!**